Следящий электропривод относится к системам автоматического регулирования по положению. Он может использоваться во многих отраслях техники и особенно перспективен для следящи.х приводов наведения радиотелескопов, работающих ,в режиме автосопровождения.
Известны следящие приводы, содержащие датчик скорости и датчик положения нагрузки, подкл очен ный через усилитель к маломощно-му двигателю, вал которого соединен с тахогенератором и через редуктор с первым входом механического диффередцнала, второй п.ход которого связан с валом силового двигателя « датчика скорости, через сумматор и усилитель соединенного с силовым двигателем.
OcHOiBHbiMH недостатками существующих следящих приводов радиотелескопов являютLsi:
-ограниченная точность наведения при реализации следящего привода с высокой добротностью;
-ограниченный регулирования по скорости.
Предлагаемый следящий привод отличается от иЗвест НЬ х тем, что в него введен логический бло-к и ключевое устройство, вход которого :подк.иючсн к выходу тахогенератора, выход --ко гзходу сумматюра, а управляющий вход-
к ВЫХОД}- логического блока, вход KOTOpoiO соединен с датчиком скорости нагрузки.
Такое построение следящего привода позволяет расщирить динамический диапазон регулирования по ско,рости и повысить точность отработки.
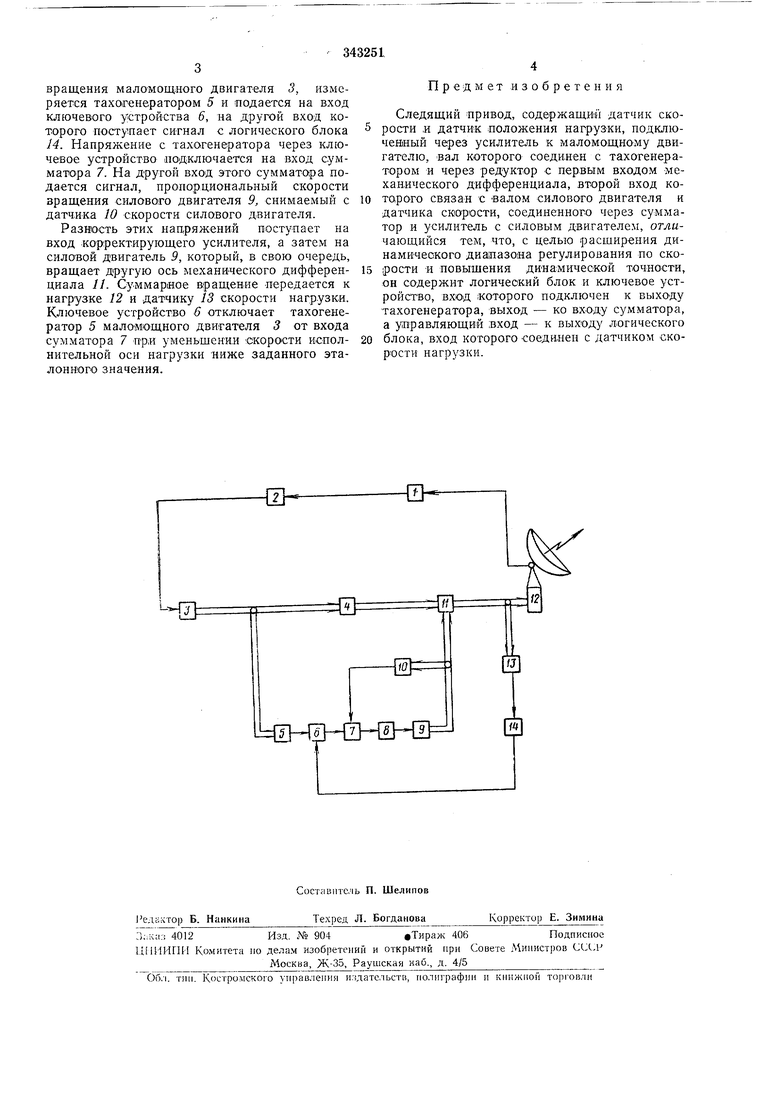
Блок-схема следящего привода приведена на чертеже.
Предлагаемый следящий привод содержит
датчик положения 1, преобразующий усилитель 2, маломощный двигатель 3, редуктор 4, тахогенерат01р 5, ключевое устройство 6, сум.матор 7, :корректирующий усилитель S, силовой двигатель 9, датчик 10 скорости силового
двигателя, механический дифференциал //, нагрузку 12, датчик 13 скорости нагрузки, логический блок 14.
Следящий привод работает следующим образом.
Сигнал с положения / поступает, пройдя преобразующий усилитель 2, на маломощный двигатель 3 и далее через редуктор 4. механический дифференциал 11 - на нагрузку 12.
Скорость нагрузки 12 измеряется датчиком 13 скорости нагрузки, сигнал с которого поступает на вход логического блока 14, где происходит сравнение исти«ной скорости оси пагрузки с требуемой.
вращения маломощиого двигателя 3, измеряется тахогенератором 5 и подается на вход ключевого устройства 6, на другой вход которого поступает сигнал с логического блока J4. Напряжение с тахогенератора через ключевое устройство подключается на вход сумматора 7. На другой вход этого сумматора подается сигнал, пропорциональный скорости вращения силового двигателя 9, снимаемый с датчика 10 скорости силового двигателя.
Разность этих напряжений поступает на вход корректирующего усилителя, а затем на силовой двигатель 9, который, в свою очередь, вращает другую ось механического дифференциала //. Суммарйое вращение передается к нагрузке 12 и датчику 13 скорости нагрузки. Ключевое устройство 6 отключает тахогенератор 5 маломощного двигателя 3 от входа сумматора 7 при уменьщенки скорости исполнительной оси нагрузки ниже заданного эталонного значения.
Предмет изобретения
Следящий привод, содержащий датчик скорости и датчик положения нагруЗКи, подключенный через усилитель к маломощному двигателю, Вал которого соединен с тахогенератором и через редуктор с первым входом механического дифференциала, второй вход которого связан с валом силового двигателя и датчика скорости, соединенного через сумматор и усилитель с силовым двигателем, отличающийся тем, что, с целью расширения динамического диапазона регулирования по скорости и повышения динамической точности, он содержит логический блок и ключевое устройство, вход которого подключен к выходу тахогенератора, выход - ко входу сумматора, а управляющий вход - к выходу логического блока, вход которого соединен с датчиком скорости нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1974 |
|
SU550630A1 |
| Следящий привод | 1977 |
|
SU857924A1 |
| Электропривод перемещения механизма подачи станка | 1982 |
|
SU1115191A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| ДВУХДВИГАТЕЛЬНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1969 |
|
SU432647A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
| Двухканальная следящая система | 1984 |
|
SU1241188A1 |
| Двухканальный следящий привод | 1975 |
|
SU572754A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
