Изобретение относится к области автоматики и может быть использовано при построении синхронно-следящих систем высокой точности.
Известны системы автоматического управления, содержащие задающий блок, через редуктор соединенный с чувствительным элеМентом, подключенный к выходу чувствительного элемента усилитель, связанный с исполнительным двигателем, который через редуктор соединен с объектом управления и с чувствительным элементом обратной связи.
Предлагаемая система отличается тем, что она содержит дискретные датчики на валах задающего блока и объекта, нуль-индикатор, соединенный с чувствительным элементом, два заторможенных блокинг-генератора, входы которых подклЮЧены к соответствующим входам триггера, дифференциатор, соединенный с выходом нуль-индикатора « входами триггера, два формирователя импульсов, два накопительных узла, два сумматора, ключи и вычитатель, два входа которого через первый и второй ключи подключены к дискретным датчикам, а выход подключен к первым входам третьего и четвертого ключей. Заторможенные блокинг-генераторы связаны с управляющими входами пятого и щастого ключей « через третий и четвертый ключи соединены с первы.ми -входами сум1мато|ров, а через седьмои и .восьмой ключи со юторьгми еходами ауммато р01в, выходы которых через формирователи импульсов и накопительные узлы подключеНЫ соответствеино к пятому и Швстому ключам, соединенным оо входо м усилителя и с входами седь|мого и восьмого.
Это позволяет повысить точность системы.
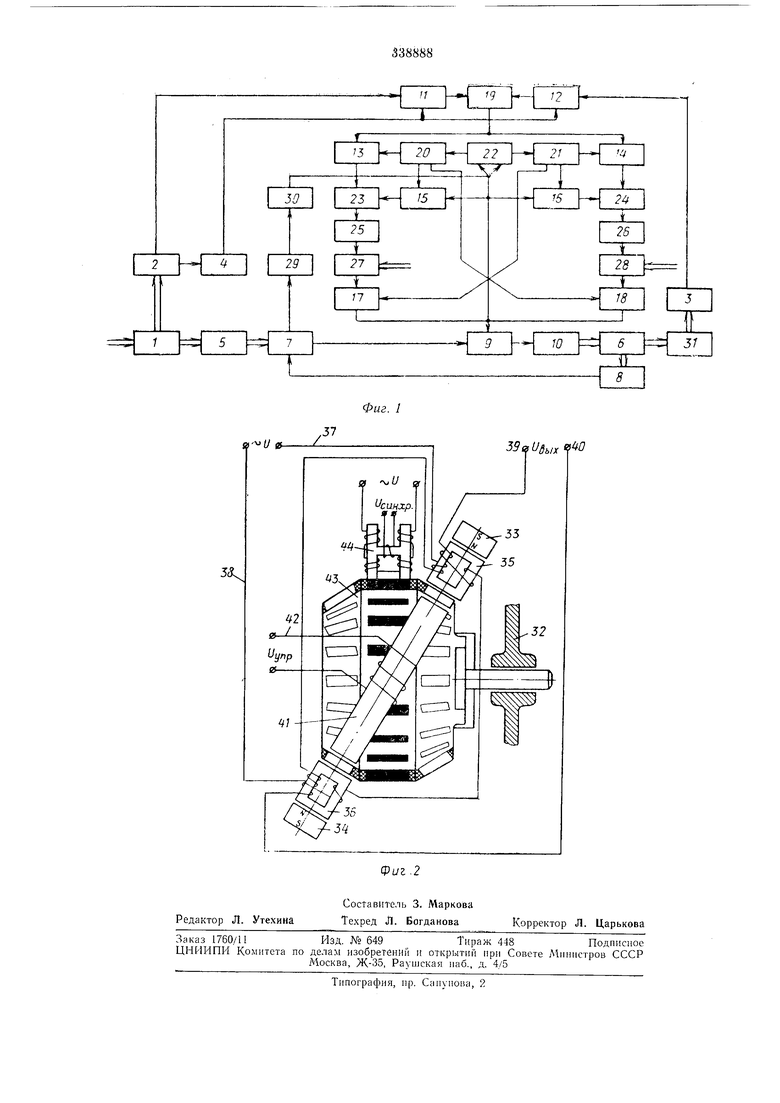
На фиг. 1 представлена структурная схема системы автоматического управления; на фиг. 2 - накопительный узел в разрезе.
Устройство автоматического управления содержит задающий блок /; дискретные датчики 2, 3; формирователь синхроимпульсов 4; редукторы 5, 6; чувствительные элементы 7, 8, усилитель 9; двигатель 10; ключи-//-/8; вычитатель 19, заторможенные блокинг-генераторы 20, 21; триггер 22, сумматоры 23, 24, формирователи импульсов 25, 26; накопительные узлы 27, 28, 1нуль-иддикагор 29 и дифференциатор 30.
Накопительные узлы 27 и 28 состоят из корпуса 32, постоянных магнитов 33, 34, рамок , 35, 36, обмоток питания 37, 38, выходных обмоток 39, 40, сердечника 41, обмотки управления 42, якоря 43 и синхронизирующего устройства 44. Якорь 43 синхронно связан с валом объекта управления 31.
падения положений сердечинка 41 и магнигожесткой пластинки якор 43.
При поступлении управляющего напряжения, пропорционального статической ошибке, на о.бмотку управления 42, расположенную на сердечнике 4,1, магнитожесткие пластины намагничиваются и сохраняют остаточную намагниченность, пропорциональную статической ошибке. Таким образом, при повороте вала объекта управления на магнитожесткие пластины накопительного узла автоматически записывается напряжение, пропорциональное .статической ошибке, в виде диакретпого сигнала, а в выходных обмотках снимается переменное напряжение, пропорциональное остаточной намагниченности в магнитожестких пластинах, и следовательно, пропордионально-е статической ошибке.
Измерение ошибки между задающим блоком / и объектом управления 31 в дискретных ноложениях осуществляется следующим образом.
При прохождении задающим блоком / контрольного положения формирователь синхроимпульсов 4 от1крывает ключи //. /2 и в вычитателе 19 сравниваются сигналы, поступающие с датчиков 2, 5 в данный момент времени.
iB результате на выходе вычитателя 19 появляется сигнал, пропорциональный ошибке, в дискретные моменты при прохождении задающим блоком 1 контрольных точек.
Устройство автоматического управления работает следующим образом.
При вращении задающего вала триггер 22 переключается с частотой периода статической ошибки. Это осуществляется за счет того, что его счетный вход через дифференциатор 30 и нуль-индикатор 29 подсоединен к элементу 7. Блокинг-генераторы 20, 21 включаются при поступлении на их вход высокого потенциала с выхода триггера 22. Таким образом, во включенном положении находится всегда один из заторможенных бложинг-генераторов.
Допустим, что в один из периодов изменения статической ошибки триггер 22 находится в положении, при котором на вход блокинггенератора 20 поступает высокий потенциал, включающий его. Блокинг-генератор 20 генерирует высокочастотное напряжение, которое затем выпрямляется и подается на вход ключей 13, 15, 18 и открывает их.
iB контрольных положениях с выхода датчиков 2, 3 поступает напряжение на вход вычитателя 19, с выхода которого напряжение, пропорциональное полной ошибке между положениями задающего устройства / и объекта управления 3-1, через открытый ключ 13 поступает на один из входов сумматора 23, на второй вход которого через ключи 15, 18 поступает напряжение с накопительного узла 28, записанное в предыдущий период изменения статической ошибки. Суммарное напряжение с выхода сумматора 23 через формирователь
импульсов поступает на вход накОНИтеЛьного узла 27.
Таким образом, на магнитожесткие пластины накопительного узла 27 будет записан сигнал, пропорциональный полной ошибке между задающим устройством / и объектом управления 31 в контрольных положениях. В следующий период изменения статической ошибки триггер 22 устанавливается в другое
положение, ключи 13, 15, 18 закрываются, а ключи 14, 16, 17 открываются. Запись сигнала, пропорционального кривой изменения статической ошибки, в контрольных положениях производится в накопительном узле 28, а на
вход усилителя 9 поступает сигнал коррекции, предварительно записанный в накопительном узле 27.
Таким образом, система автоматического управления обеспечивает автоматическую
компенсацию любой статической ошибки. Статическая ошибка, изменяющаяся в зависимости от угла поворота вала, при изменении температуры и других факторов записывается авто:матически в накопительном узле (27,
28) и подается в систему для коррекции. Дискретные датчики 2, 3 обладают небольшой линейной зоной и высокой точностью к микроперемещениям, поэтому обеспечивают высокую точность формирования сигнала рассотасования в контрольных положениях.
Предмет и з о б р е т е н и я
Система автоматического управлепия, содержащая задающий блок, через редуктор соединенный с чувствительным элементом, подключенный к выходу чувствительного элемента усилитель, связанный с исполнительным двигателем, который через редуктор соединен
с объектом управления и с чувствительным элементом обратной связи, отличающаяся тем, что, с целью повышения точности, она содержит дискретные датчики на валах задающего блока и объекта, нуль-индикатор, соединенный с чувствительным элементом, два заторможенных блокинг-генератора, входы которых подключены к соответствующим входам триггера, дифференциатор, соединенный с выходом нуль-индикатора и входами триггера, два формирователя импульсов, два накопительных узла, два сумматора, .ключи и вычитатель, два входа которого через первый и второй ключи подключепы к дискретным датчикам, а выход подключен к первым входам
третьего и четвертого ключей; при этом заторможенные блокинг-генераторы связаны с управляющими входами пятого « шестого ключей и через третий и четвертый ключи соединены с первыми входами сумматоров, а
через седьмой и восьмой ключи со вторыми входами сумматоров, выходы которых через формирователи импульсов и накопительные узлы подключены к пятому « шестому .ключу соответственно, соединенным с входом усилн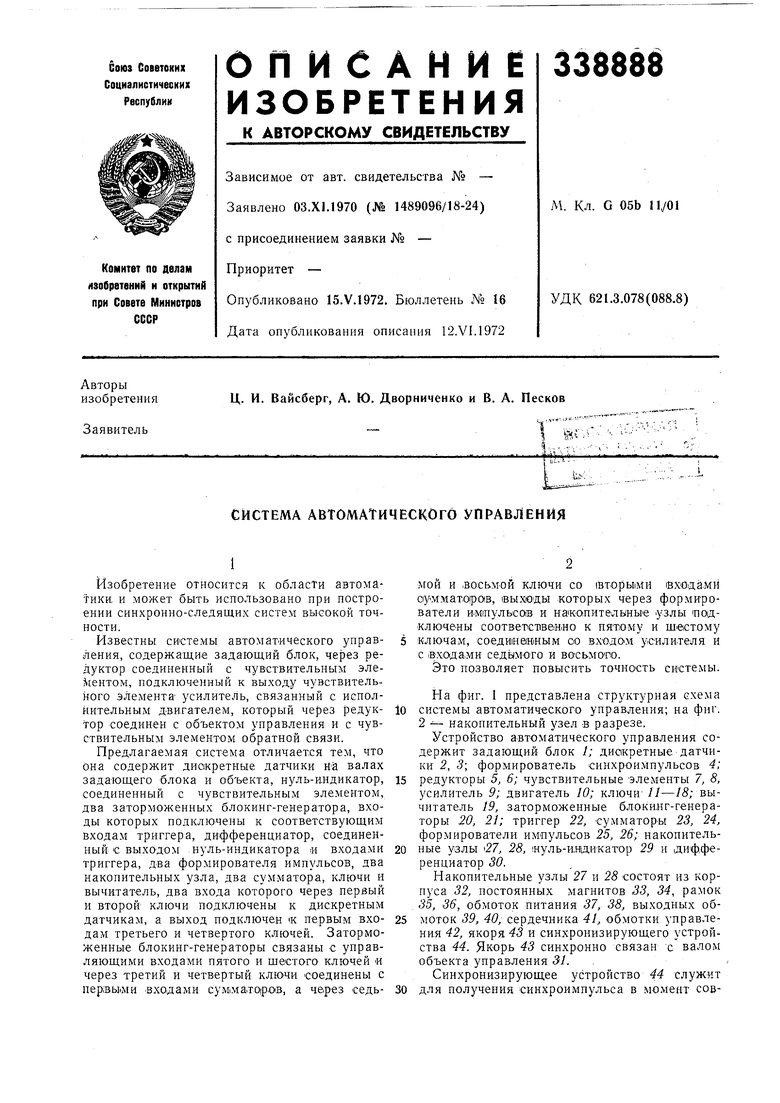
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоимпульсный измеритель размеров объектов | 1990 |
|
SU1744464A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Анализатор спектра | 1982 |
|
SU1182431A1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1991 |
|
RU2018899C1 |
| Система автоматического регулирования | 1978 |
|
SU752221A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Следящая система | 1986 |
|
SU1376061A1 |
| А. И. ТЕЛИС- ^ Лj^'^'•--•:;; 'Г^" ;,^Украинский научно-исследовательский институт станков" и инструментов | 1967 |
|
SU200923A1 |
| СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2560204C2 |