Изобретение относится к следящим системам с люфтом в механической передаче и может быть использовано в металлорежущих станках, опорно-поворотных механизмах экскаваторов, моделирующих стендов и роботов-манипуляторов. Известна следящая система, содержащая последовательно соединенные задатчик, измеритель рассогласования, предварительный усилитель, усилитель мощности, исполнительный двигатель и силовой редуктор, на выходном валу которого установлен объект регулирования и первый датчик положения, вторым входом подключенный к выходу второго датчика положения, а выходом через последовательно соединенные блок управления и корректирующий двигатель - к второму входному валу редуктора, вал исполнительного двигателя через измерительный редуктор соединен с входом второго датчика положения, а второй выход объекта регулирования соединён с вторым входом измерителя рассогласования 1. Известна следящая система, содержащая последовательно соединенные задатчик, измеритель рассогласования, усилитель, исполнительный двигатель и редуктор, на валу которого установлен объект регулирования на первый датчик положения, вторым входом через второй датчик положения соединенный с промежуточным валом редуктора, а выходом через дифференциатор-преобразователь - с вторым входом измерителя рассогласования, и тахогенератор, входом соединенный с выходом двигателя, а выходом - с третьим входом измерителя рассогласования 2. Недостатком известных .систем является их низкая точность. Наиболее близкой по технической сущности к предлагаемой является следящая система, содержащая последовательно соединенные задатчик, измеритель рассогласования, предварительный усилитель, усилитель мощности, исполнительный усилитель и силовой редуктор, на выходном валу которого установлены объект регулирования и первый задатчик положения, вторым входом подключенный к выходу второго датчика положения, а выходом через последовательно соединенные блок сравнения и корректирующий двигатель - к второму входному валу силового редуктора, вал исполнительного двигателя через измерительный редуктор соединен с входом второго датчика положения, а через тахогенератор - с вторым входом блока сравнения 3. Недостатком известной системы является ее низкая точность. Цель изобретения - повыщение точности системы. Поставленная цель достигается тем, что в следящей системе, содержащей последовательно соединенные задатчук, измеритель рассогласования, предварительный усилитель, усилитель мощности, исполнительный двигатель и силовой редуктор, входной вал которого соединен с валом тахогенератора, а на выходном валу установлены объект регулирования и датчик положения, соединенный выходом через блок сравнения с первым входом интегратора, второй вход интегратора подключен к выходу тахогенератора, а выход интегратора соединен с вторыми входами блока сравнения и измерителя рассогласования. На фиг. 1 представлена структурная схема системы; на фиг. 2 - функциональная схема системы. Система включает измеритель 1 рассогласования, предварительный усилитель 2, усилитель 3 мощности, исполнительный двигатель 4, силовой редуктор 5, объект б регулирования, датчик 7 положения, тахогенератор 8, интегратор 9, блок 10 сравнения, задатчик II, пропорциональное звено 12, нелинейное звено типа «люфт 13,резисторы 14-23, операционные усилители 24-26, конденсатор 27, общая щина 28 системы, датчик 29 положения, Uj - сигнал на выходах i-x блоков системы. Последовательное соединение тахогенератора 8 и интегратора 9 функционально выполняет роль датчика положения. Для исключения формирования ложных сигналов в силовых блоках следящей системы за счет возникновения собственных переходных процессов в отдельных блоках системы при включении системы в работу напряжение питания вначале подается на несиловую часть следящей системы (т. е. на блоки, формирующие закон управления), а затем с некоторой выдержкой времени напряжение подается на силовую часть системы (т. е. на усилитель 3 мощности и исполнительный двигатель 4). За время этой выдержки осуществляется автоматическое согласование выходного сигнала интегратора 9 и выходного сигнала датчика 7 положения в соответствии с уравнением: f + ., где Тд и и - постоянная времени и выходной сигнал интегратора -9; KIO - коэффициент передачи блока 10 сравнения; Uy - выходной сигнал датчика 7 положения. Система работает следующим образом. Выходной сигнал задатчика U поступает на первый вход измерителя 1 рассогласования, а на второй его вход поступает выходной сигнал Ug интегратора 9. На выходе измерителя 1 рассогласования формируется сигнал Uj в зависимости от разности выходных сигналов U, Ug задатчика 11 и интегратора 9 по закону Ui К,(Ц,- -Ug), где Kj - коэффициент передачи измерителя 1 рассогласования, и поступает на вход предварительного усилителя 2.
На выходе предварительного усилителя
2формируется сигиал Uj, в зависимости от выходного сигнала Ui измерителя 1 рассогласования по закону U2. K2.Lft, где К коэффициент передачи предварительного усилителя 2, и поступает на усилитель 3 мощности.
На выходе усилителя 3 мощности формируется сигнал Uj в зависимости от выходного сигнала U. предварительного -усилителя 2 по закону U K., где Кз - коэффициент передачи усилителя 3 мощности, и поступает на вход исполнительного двигателя 4. Вал исполнительного двигателя 4 начинает вращаться и через редуктор 5 поворачивает объект 6 регулирования на некоторый угол, измеряемый датчиком 7 положения. На выходе датчика 7 положения формируется сигнал Ur в зависимости от выходного сигнала усилителя
3мощности по закону U К4К5К Kj-Uj, где К4, KS, Kf и Kf - коэффициенты передачи соответственно исполнительного двигателя 4, редуктора 5, объекта 6 регулирования и датчика 7 положения, и поступает на первый вход блока 10 сравнения, на второй вход которого поступает сигнал с выхода интегратора 9.
На выходе блока 10 сравнения формируется сигнал Ujo в зависимости от разности выходных сигналов Uq и U интегратора 9 и датчи11а 7 положения по закону:
Uio Kio (Ug-Uy), где KIO - коэффициент передачи блока 10 сравнения, и поступает на первый вход интегратора 9, на второй вход которого поступает сигнал Ug с выхода тахогенератора 8.
Выходной сигнал Ug тахогенератора 8 формируется в зависимости от выходного сигнала U усилителя 3 мощности по закону: Ug K4K8-U3 , где КА и Kg - коэффициенты передачи соответственно двигателя 4 и тахогенератора 8.
На выходе интегратора 9 формируется сигнал Ug в зависимости от разности выходных сигналов Ug и LJjo тахогенератора 8 и блока 10 сравнения по закону Ug - K CUg-Ujo ), где Kg -ур- коэффициент передачи интегратора 9, Т - постоянная времени интегратора 9, и поступает на второй вход измерителя 1 рассогласования, на второй вход которого поступает выходной сигнал Uji задатчика 11.
Указанные выше коэффициенты передачи /С отдельных функциональных блоков предлагаемой системы могут принимать любые значения (постоянные, переменные, линейные, нелинейные и т.д.) в зависимости от требований, предъявляемых к характеристикам следящей системы, а также в зависимости от конкретного конструктивного выполнения указанных блоков.
Если люфт редуктора 5 выбран и вал исполнительного двигателя 4 через редуктор 5 сцеплен с валом объекта б регулирования, то данная следящая система эквивалентна следящей системе с редуктором без люфта. П-ри этом выходные сигналы Ug и U интегратора 9 и датчика 7 положения, поступающие наблок 10 сравнения, противо-. положны по закону и одинаковы по величине, а выходной сигнал U)o блока 10 сравнения-равен нулю. Это обусловлено тем, что постоянная времени Т интегратора 9 равНЗ
т,в|, (/)
гдek7-коэффициент усиления датчика 7
положения;
kg- коэффициент усиления тахогенератора 8;
-передаточное число силового ре дуктора 5.
В этом случае выходной сигнал Ug тахогенератора 8 интегрируется и инвертируется в интеграторе 9 h подается на инвертирующий вход измерителя I рассогласова0 ния (фиг. 2), т. е. следящая система замкнута обратной связью по выходному сигналу датчика 29 положения, в состав которого входят последовательно соединенные тахогенератор 8 и интегратор 9.
Величина ощибки слежения в системе 5 определяется лищь ее статическими и динамическими свойствами и может быть как угодно малой при соответствующих условиях. Так как в системе (фиг. 1) входной . сигнал и датчика 7 положения поступав на инвертирующий вход блока 10 сравне ния, а выходной сигнал Ug интегратора 9 поступает на прямой вход блока 10 сравнения, то при движении вала исполнительного двигателя 4 в зоне люфта силового редуктора 5 проинтегрированный выходной сигнал Ug тахогенератора 8 не равен выходному сигналу U датчика 7 положения и на выходе блока 10 сравнения формируется сигнал Ujo , пропорциональный их разности, т. е. Uio К)о (Ug-UY), где Kjo - коэффициент передачи блока 10 сравнения 0 (фиг. 1), и поступает на инвертирующий вход интегратора 9. С выхода интегратора 9 на инвертирующий вход измерителя 1 рассогласования поступает сигнал Uq, зависящий от выходных сигналов Uy и Ug датчика 7 положения-и тахогенератора 8 5 следующим образом:
и9-К9-К8-и4-К,,-К,(Ц-и,), (2) гдеи, U7,Ug - сигналы на выходах исполнительного двигателя 4, датчика положения 7, интегратора 9;
в-Т8р,К,
50
Кур коэффициенты передачи тахогенератора 8, интегратора 9 и блока 10 сравнения;
TgиТд-постоянные времени тахогенера55тора 8 и интегратора 9.
Из выражения (2) следует, что сигнал и с выхода интегратора 9 не равен нулю даже тогда, когда выходной сигнал датчика 7 положения Uy 0, а вал исполнительного двигателя 4 движется в зоне «люфт силового редуктора 5, т. е. следящая система по каналу обратной связи остается замкнутой при прохождении зоны «люфта, что позволяет формировать ее желаемые динамические свойства.
Указанные выше отличительньш особенности предлагаемого технического решения позволяют существенно (т. е. примерно в шесть раз) расширить область значений
коэффициента усиления разомкнутого контура следящей системы, при которой система будет устойчива, по сравнению с критическим значением коэффициента усиления в известной системе,замнутой непосредственно по сигналу датчика положения. Такая возможность увеличения коэффициента усиления разомкнутого контура следящей системы увеличивает ее добротность, т. е. примерно в семь раз улучшает статическую и в девять раз динамическую точность следящей системы.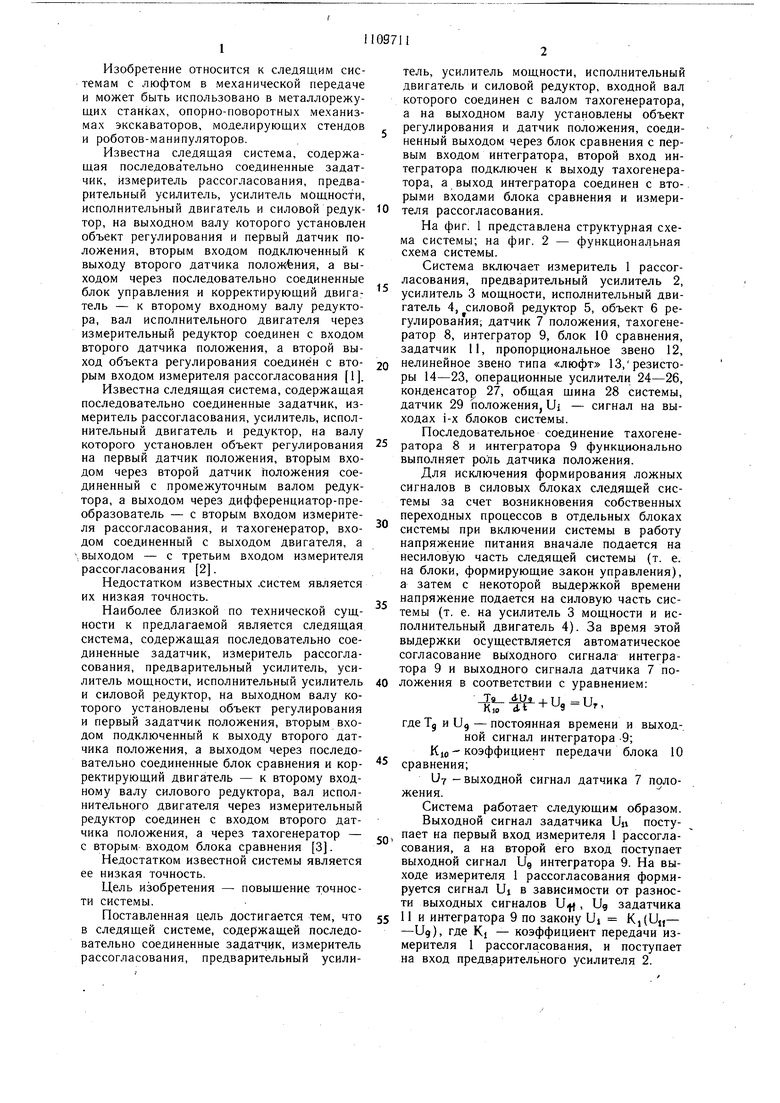


| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1988 |
|
SU1645938A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Следящий привод | 1977 |
|
SU857924A1 |
| Следящая система | 1981 |
|
SU993202A1 |
| Следящая система | 1978 |
|
SU746408A1 |
| Следящий электропривод | 1981 |
|
SU1045219A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2066873C1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Нелинейное корректирующее устройство | 1982 |
|
SU1023275A1 |
СЛЕДЯЩАЯ СИСТЕМА, содержащая последовательно соединенные задатчик, измеритель рассогласования, предварительный усилитель, усилитель мощности, исполнительный двигатель и силовой редуктор, входной вал которого соединен с валом тахогенератора, а на выходном валу установлены объект регулирования и датчик положения, соединенный выходом через блок сравнения с первым входом интегратора, отличающаяся тем, что, с целью повышения точности системы, в ней второй вход интегратора подключен к выходу тахогенератора, а выход интегратора соединен с вторыми входами блока сравнения и измерителя рассогласования. (Л С о со 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следящая система | 1975 |
|
SU559220A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
