(54) СЛЕДЯЩИЙ ПРИВОД

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1974 |
|
SU550630A1 |
| Следящая система | 1975 |
|
SU533908A1 |
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
| Следящая система | 1975 |
|
SU607181A1 |
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Двухканальный следящий привод | 1975 |
|
SU572754A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
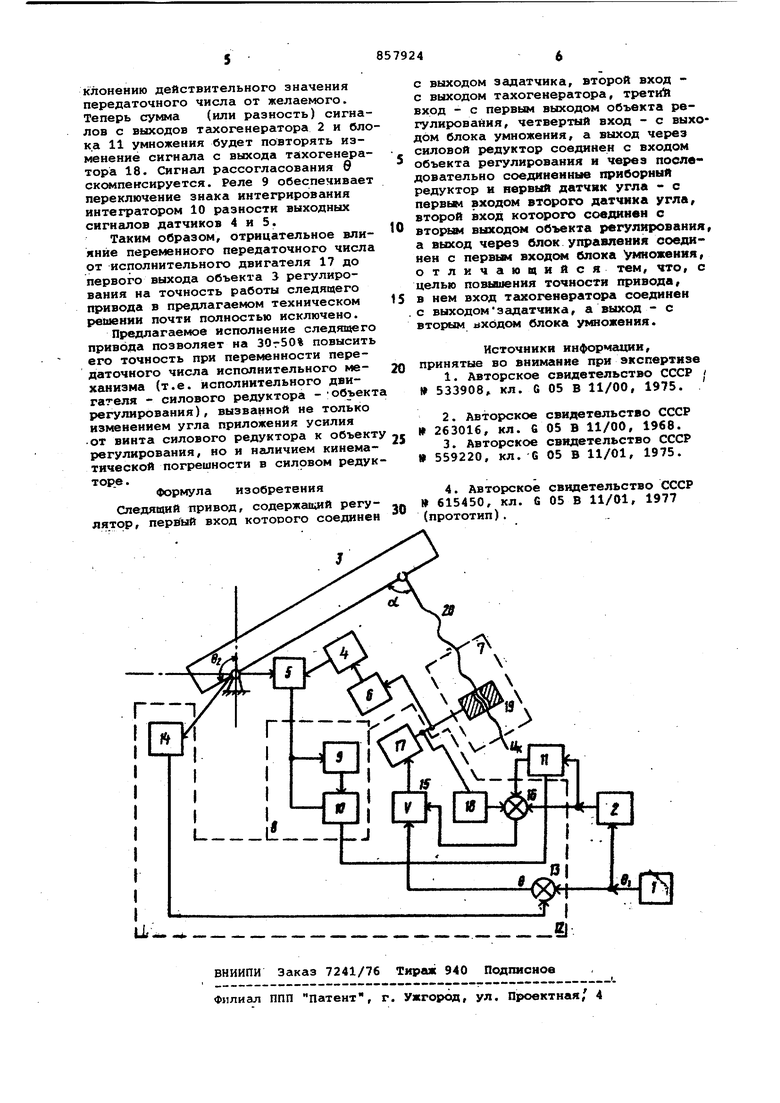
Изобретение относится к системс№1 автоматического управления и регулирования и может быть использовано при построении новых следящих сис тем или модернизации их в различных отраслях народного хозяйства. Известно построение систем автом тического регулирования, в которых исполнительный механизм (исполнительный двигатель - силовая передача - объект) следящего привода пред ставляет собой сочетание винтового механизма, передающего поступательное движение объекту (балке), вращающемуся относительно оси вращения (оси цапф), удаленной на определенное расстояние от точки приложения усилия к объекту от винта. Принципиальной особенностью таких испопнительных механизмов является переменность передаточного числа в достаточно широких пределах (до 30-40% из-за изменения угла приложения усилия от винта к объекту при повороте его вокруг собственной оси вращения. Известен следящий привод, содержа щий регулятор и корректирующий каиал, выходы которых соединены соответственно с первым л вторым входами дифференциала, выход которого соединен с входом силовой передачи, выход которой соединен с входом объекта, первЁт вход регулятора соединен с входом привода и входом задающего тахогенератсчра, выхЬд которого соединен с вторым входом регулятора,третий вход регулятора соединен с выходом объекта и первым входом делительного устройства, второй вход которого соединен с выходом датчика угла поворота исполнительного двигателя регулятора, а выход - с пертам входом сумматора, второй вход котсфого соединен с выходом источника эталонного сигнала, а выход с входом канала fl. ,Недостаткг1Ми известнохю следящего привода являются - наличие достаточно- сложного в реализаш1н делительного устройства, то, что разность сигналов тшода объекта и источника этгшонного сигнала не можетдать объективной оценки о других погрианостях силовой механической передачи, так как в ней не может быть эапрогргтьшровано движение веша исполнител1 иого двигателя регулятора во всех режимах работы. Кроме того, нлличие силовых корректирующего канала и механического дифференциала усложняют реализацию следящего привода. Известен следящий привод, содержащий регулятор, первый вход которого соединен с выходом задатчика,второй вход - с выходом объекта регулирования, а выход-с входом объекта регулирования непосредственно и чере последова- ельио соединенные модель Объекта и первый датчик - с первым входом вычитателя, второй вход которого через второй датчик соединен с- выходом объекта регулирования, а выход - с третьим входом регулятора Известен также следящий привод, содержащий последовательно соединенные измеритель рассогласования, усилитель, основной двигатель, дифферен циал, силовую передачу и объект регулирования, выход которого соединен с первым входом измерителя рассогла сования и первым входом блока сравнения, второй вход которого через приборный редуктор подключен к выходу основного двигателя, а выход че рез последовательно соединенные блок управления и дополнительный двигатель подключен к второму входу дифференциала Сз . Наиболее близким к предлагаемому по технической сущности является сле дящий привод, содержащий регулятор, первый вход которого соединен с выходом задатчика, второй вход - с выходом тахогенератора, третий входс первым выходом объекта регулирования, четвертый вход - с выходом блока умножения, а выход через силовОй редуктор соединен с входом объекта регулирования и через последователь но соединенные приборный редуктор и первый датчик угла - с первым входом второго датчика угла, второй вход которого соединен с BTOpijjM выходом объекта регулирования, а выход через блок управления соединен с первым входом блока умножения f4 . Цель изобретения - повьоиение точности привода. Поставленная цель достигается тем, что в приводе вход тахогенератора соединен с выходом задатчика, а выход - с вторым входом блока умножения. На-черт.еже представлена блок-схема привода. Следящий привод содержит задатчик 1, тгйсоатенератор 2,.объект 3 регулирования, первый и второй датчики 4 и 5 угла, приборный редуктор 6, сило вой редуктор 7, блок 8 управления, в состав которого входят реле 9 и интегратор 10, блок 11 умножения, регулятор 12,в состав которого вход сумматор 13, датчик 14 угла, усилиталь 15, сумматор 16, исполнительный двигатель 17 и та огенератор 18, гай ка 19 и винт 20, которые входят в состав силового редуктора 7,,)соответственно входное воздействие привода (т.е.. выходной сигнал задатчика 1), регулируемая координата (т.е. относительное положение объекта 3 регулирования), сигнал рассогласования (т.е. выходной сигнал сум.матора 13, входящего в состав регулятора 12), oL - угол приложения усилия от винта 20 силового редуктора 7 к объекту 3 регулирования. Следящий привод работает следую-щим образом. Пусть выходной сигнал задатчика 1 в2(-1)ЙД представляет собой изменение входной координаты с постоянной скоростью Я. , За счет появившегося сигнала рассогласования О на выходе сумматора 13, усиленного усилителем 15, исполнительный двигатель 17 начинает вращаться. Если бы передаточное число от исполнительного двигателя 17 до первого выхода объекта 3 регулирования было постоянным, то скорость исполнительного двигателя 17 также была бы постоянной.Но это передаточное число переменное. : Для обеспечения постоянной скорости на выходе объекта 3 регулирования Яд исполнительный двигатель 17 должен вращаться с переменной скоростью. Тахогеиератор 18 регулятора 12,примененный для улучшения динамических характеристик регулятора 12, будет вырабатывать сигнал, переменный относительно постоянного сигнала с тахогенератора 2, вращающегося с постоянной скоростью их const. За счет переменной разности сигналов с тахогенераторов 2 и 18, выявленной в сумматоре 16, сигнал рассогласования в не будет полностью скомпенсирован, поэтому высокая точность у следящего привода не будет обеспечена. Датчики 4 и 5 и приборный редуктор 6 обеспечивают измерение положения объекта 3 регулирования относительно промасштабированного приборным редуктором 6 положения вала исполнительного двигателя 17 регулятора 12. По величине полученной разности положений объекта 3 регулирования и вала исполнительного двигателя 17 может быть /оценено отклонение действительного значения передаточного числа от исполнительного двигателя 17 к первому выходу объекта регулирования от его желаемого значения. Полученная разность интегрируется в интеграторе 10 и изменяет уровень выходного сигнала тахогенератора 2 за счет перемножения в блоке 11 умножения части выходного сигнала тахогенератора 2 с выходным сигналом интегратора 10, пропорциональным от
