Предлагаемое устройство может быть иснользовано в пневматических датчиках, нозиционерах при автоматическом регулировании производственных процессов с обратной связью в химической, металлургической и других отраслях промышленности.
Преобразователи, содержащие рычаги, механически связанные с клапанами, выполненными в виде сопла-заслонки, известны.
Недостатками их являются невозможность точной притирки сопел к заслонке и нерегулируемость утечки воздуха через сопло, связанное с атмосферой, при наладке пневматических датчиков и позиционеров, что приводит к неудовлетворительной чувствительности пневматических датчиков и к трудностям настройки прибора в целом.
Предлагаемый преобразователь углового перемещения в пневматический сигнал содержит камеру с двумя управляемыми клапанами, один из которых соединен с каналом, питания, а другой - с атмосферой, коромысло, механически связанное с вращающейся осью, и выходной щтуцер, связанный с камерой.
Для улучшения эксплуатационных характеристик в преобразователе клапаны выполнены шариковыми, причем шарики механически связаны с пружинами, а коромысло соединено с клапанами регулировочными винтами.
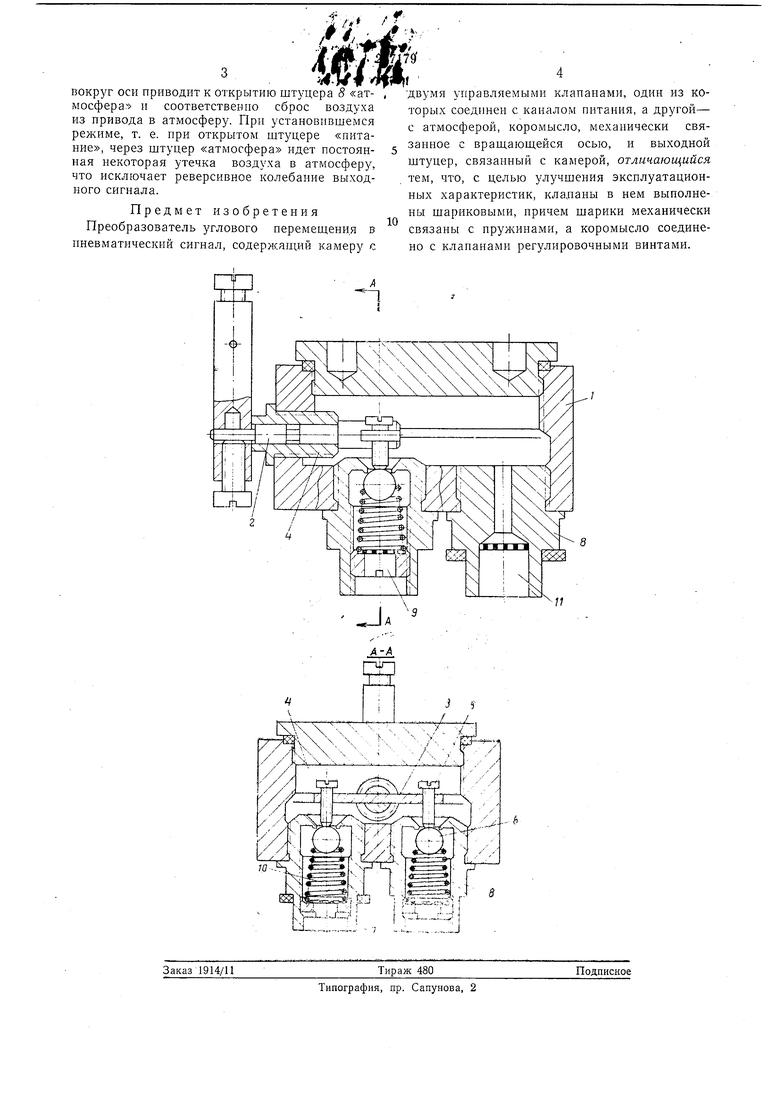
Схема преобразователя показана на чертеже.
В корпусе / преобразователя расположены приводная ось 2 и коромысло 3. Последнее находится в камере 4. Ось и коромысло вращаются вокруг оси реверсивно на 10-15°, нажимая винтами 5 на клапаны 6, расположенные в штуцерах 7 «питание и 5 «атмосфера. Для точной регулировки расхода воздуха в атмосферу щтуцер «атмосфера снабжен регулировочной гайкой 9, которая позволяет (клапан жестко прикреплен к пружине 10) изменить зазор клапаном 6 и штуцером-седлом 7 и 8, обеспечивая нужный расход воздуха в атмосферу и тем самым определяя чувствительность прибора. Клапан штуцера 7 «питание герметичен за счет жесткости пружины. Выход воздуха из корпуса / на пневматический привод осуществляется через щтуцер // «привод.
Устройство, работает следующим образом. При повороте оси 2 на некоторый угол по часовой стрелке винт 5 нажимает на клапан 6 штуцера 7 «питание, воздуха заполняет камеру 4 и идет через выходной щтуцер У/ на .пневматический исполнительный механизм.
| название | год | авторы | номер документа |
|---|---|---|---|
| Контрольно-весовой автомат для отбраковки штучных грузов различной конфигурации | 1972 |
|
SU482632A1 |
| Пневматический преобразователь усилия | 1981 |
|
SU976309A1 |
| ПНЕВМАТИЧЕСКИЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР С БЛОКИРОВКОЙ | 1971 |
|
SU316094A1 |
| ДОИЛЬНЫЙ АППАРАТ ВИННИКОВА И.К. | 1995 |
|
RU2084136C1 |
| Пневматическая система дистанционного управления дизелем | 1989 |
|
SU1721279A1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ДАВЛЕНИЯ ГАЗА | 1989 |
|
RU2046394C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ШЛИФОВАЛЬНОГО КРУГА В ПРОЦЕССЕ ОБРАБОТКИ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2019 |
|
RU2711063C1 |
| Устройство для ультразвукового исследования глаза | 1977 |
|
SU695660A1 |
| Устройство для разделения материалов по свойствам поверхности | 1980 |
|
SU882666A1 |
| ГИДРОСИСТЕМА ЭЛЕКТРОКАПЛЕСТРУЙНОГО ПРИНТЕРА И ЕЕ ЭЛЕМЕНТЫ | 2002 |
|
RU2212633C1 |
