Известны способы двухимпульсного регулирования скорости, например дизель-генератора, с регулирующими воздействиями по возмущению, вызываемому импульсом по производной от нагрузки по времени, и по отклонению, вызываемому импульсом от скоростной ошибки объекта регулирования.
Описываемый способ отличается от известных тем, что в качестве регулирующего воздействия по возмущению вводят импульс прямоугольной формы, амплитуда которого максимальна, а длительность задана в зависимости от величины производной, а в качестве регулирующего воздействия по отклонению используют сигнал, пропорциональный скоростной ощибке.
Это позволяет оптимизировать процесс регулирования.
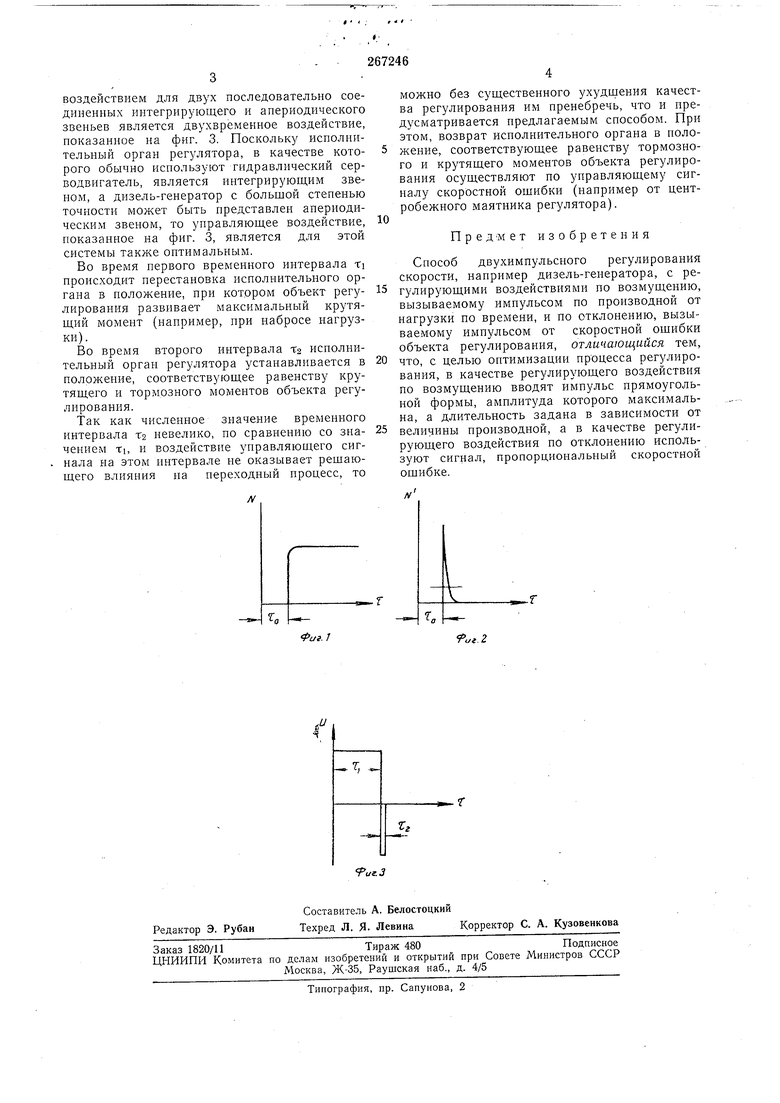
На фиг. 1 показана кривая изменения нагрузки; на фиг. 2-кривая изменения импульса по производной; на фиг. 3-кривая управляющего воздействия.
Способ двухимпульсного регулирования скорости заключается в использованни в качестве сигнала по возмущению импульса по производной от нагрузки. Однако такие способы действенны для улучшения динамических характеристик регуляторов прямого действия, но малоэффективны для двухимпульсных регуляторов непрямого действия. Это
обусловлено формой импульса по производной от нагрузки, усредненная величина которого по времени мала и не обеспечивает быстрого перемещения исполнительного органа регулятора в необходимое положение.
Действительно, при резких измепенпях нагрузки, как показано на фиг. 1, имнульс по производной имеет форму, изображенную на фиг. 2. Хотя максимальная амплитуда этого импульса, пропорциональная производной от нагрузки, достаточно велика, его кратковременность не позволяет эффективно улучшить качество регулирования из-за запаздываний в исполнительном органе регулятора.
Целью предлагаемого изобретеиия является улучшение динамических характеристик двухимпульсного регулятора непрямого действия. Способ заключается в том, что на исполнительный орган регулятора подают импульс прямоугольной формы, амнлитуда которого максимальиа, а длительность определяется производной от нагрузки объекта регулирования.
Такой способ управления исполнительным органом регулятора скорости является практически оптимальным, так как обеспечивает минимальную длительность переходного процесса объекта регулирования при изменениях иагрузки.
воздействием для двух последовательно соединенных интегрирующего и апериодического звеньев является двухвременное воздействие, показанное на фиг. 3. Поскольку исполнительный орган регулятора, в качестве которого обычно используют гидравлический серводвигатель, является интегрирующим звеном, а дизель-генератор с большой степенью точности может быть представлен апериодическим звеном, то управляющее воздействие, показанное на фиг. 3, является для этой системы также оптимальным.
Во время первого временного интервала TI происходит перестановка исполнительного органа в положение, при котором объект регулирования развивает максимальный крутящий момент (например, при набросе нагрузки).
Во время второго интервала Тз исполнительный орган регулятора устанавливается в положение, соответствующее равенству крутящего и тормозного моментов объекта регулирования.
Так как численное значение временного интервала Т2 невелико, по сравнению со значением ть и воздействие управляющего сигнала на этом интервале не оказывает решающего влияния иа переходный процесс, то
можно без существенного ухудщения качества регулирования им пренебречь, что и предусматривается предлагаемым способом. При этом, возврат исполнительного органа в ноложение, соответствующее равенству тормозного и крутящего моментов объекта регулирования осуществляют но управляющему сигналу скоростной ошибки (например от центробежного маятника регулятора).
изобретения
Способ двухимпульсного регулирования скорости, например дизель-генератора, с регулирующими воздействиями по возмущению, вызываемому импульсом по производной от нагрузки по времени, и по отклонению, вызываемому импульсом от скоростной ошибки объекта регулирования, отличающийся тем,
что, с целью оптимизации процесса регулирования, в качестве регулирующего воздействия по возмущению вводят импульс прямоугольной формы, амплитуда которого максимальна, а длительность задана в зависимости от
величины производной, а в качестве регулирующего воздействия по отклонению используют сигнал, пропорциональный скоростной ошибке.
/V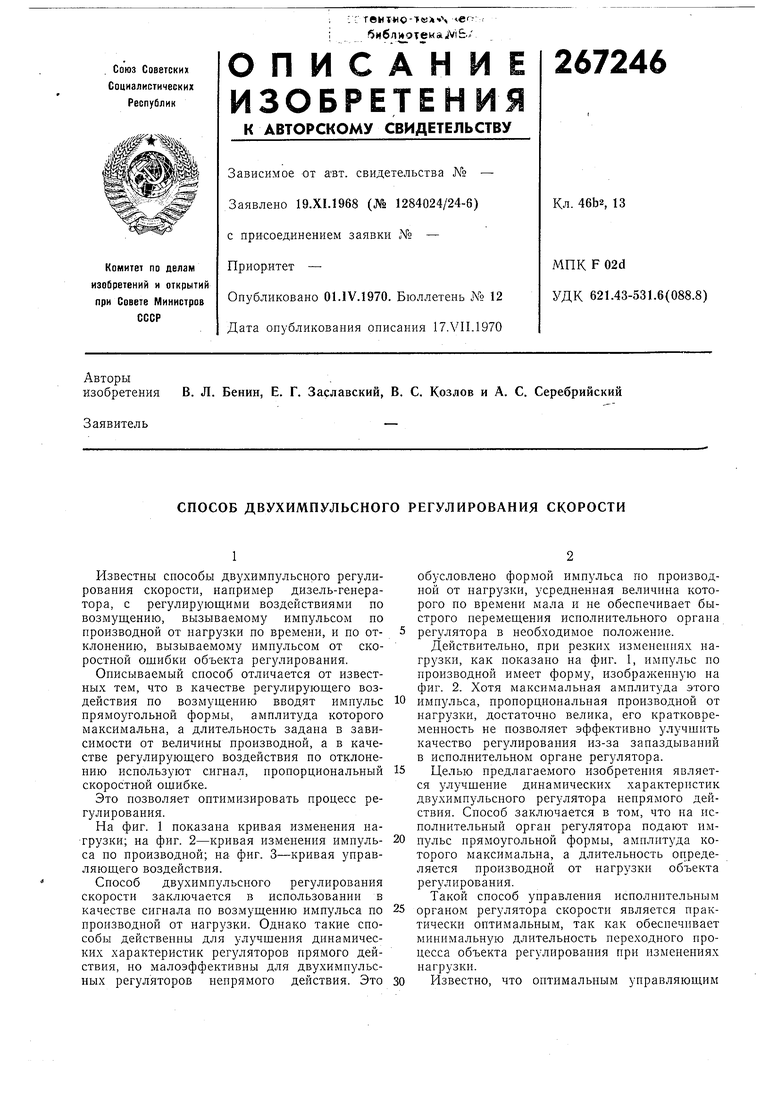
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухимпульсный регулятор угловой скорости | 1980 |
|
SU954962A1 |
| Устройство для регулирования скоростидВигАТЕля | 1979 |
|
SU798748A1 |
| Способ автоматической настройки ПИД-регулятора для управления дизельным двигателем в составе электроагрегатов и электростанций | 2016 |
|
RU2653938C2 |
| Двухимпульсный регулятор угловой скорости | 1987 |
|
SU1411721A2 |
| Двухимпульсный регулятор угловой скорости | 1987 |
|
SU1451654A1 |
| Пневматическое устройство компенсациизАпАздыВАНия | 1975 |
|
SU805255A2 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| Двухимпульсный регулятор угловой скорости | 1984 |
|
SU1265722A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Способ многосвязного управления технологическими процессами с прогнозированием | 2023 |
|
RU2826858C1 |
ФигЛ
.г
