1 -
Изобретение относится к устройствам компенсации запаздывания и может быть использовано в системах автоматического управления объектами с запаз)п(ыванием в химической, нефтехими-. ческой, энергетической, металлургической и других отраслях промышленности.
Известны устройства компенсации запаздывания, содержащие последовательно соединенные модель объекта без запаздывания, блок запаздывания и сумматор, второй вход которого соединен со входом блока запаздывания 1 и 2. ,
По основному авт.св. № 301689 известно пневматическое устройство компенсации запаздывания, содержащее последовательно соединенные звено запаздывания и инерционную часть, состоящую из усилительного звена и апериодического звена, и сумматорi положительные и отрицательные камеры которого соединены со входом и выходом звена запаздывания 3.
Недостатком известного устройства является низкое качество регулирования в случае приложения возмущающих воздействий ко входу объекта.
Цель предлггаембго изобретения повышение качества регулирования устройства.
Поставленная цель достигается тем,
5 что в устройстве вход звена запаздывания соединен с соответствующей
. камерой сумматора через корректирующее звено.
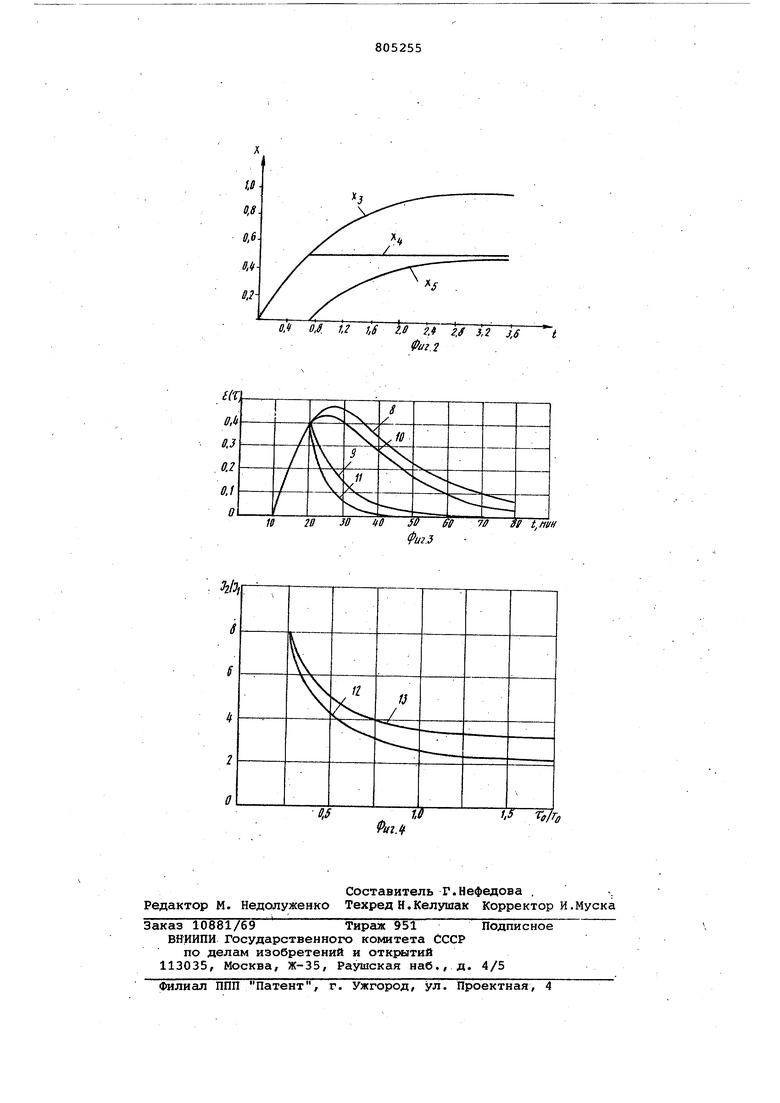
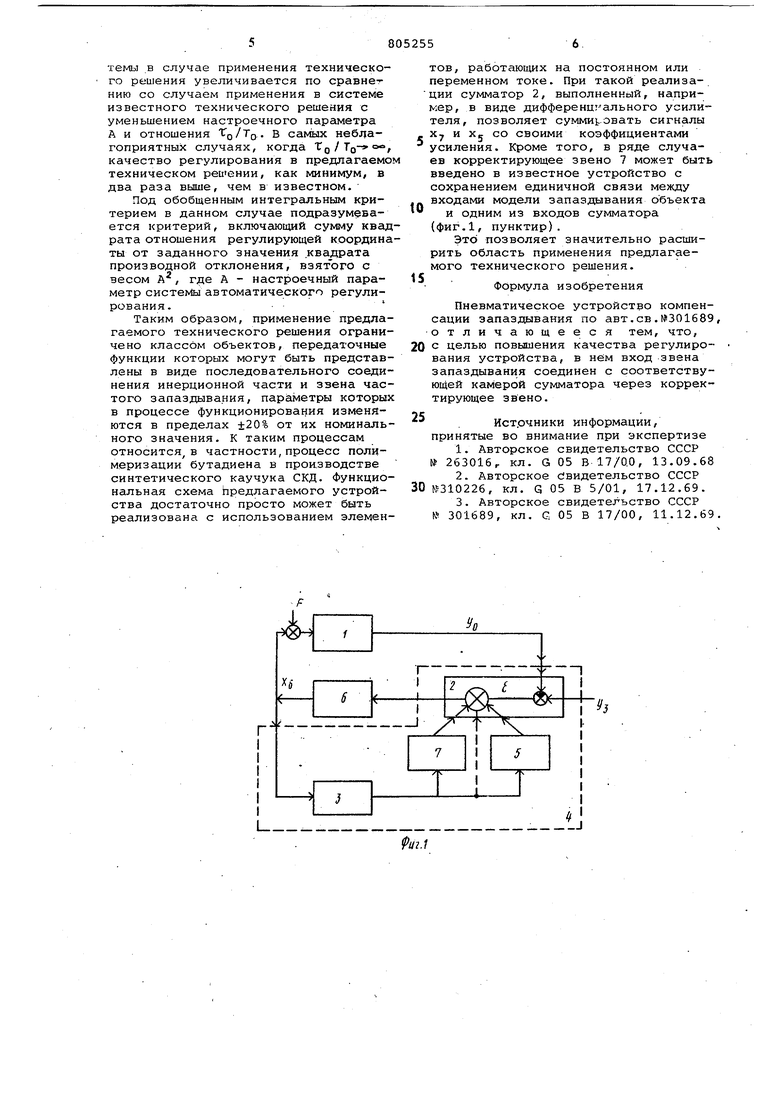
На фиг.1 представлена функциональная схема устройства; на фиг.2 и 3кривые переходных процессов в системах автоматического регулирования предлагаемым и известным устройствами; на фиг. 4 - характеристики, иллюстрирующие эффективность предлагаемого решения. , .
Устройство содержит объект 1, сумматор 2, инерционную часть 3 устройства (модель объекта без запаздьвания ) , устройство 4 компенсации запаздывания, звено 5 запаздывания (моде..ь запаздывания объекта ) , регулятор 6, корректирующее звено 7. На ,
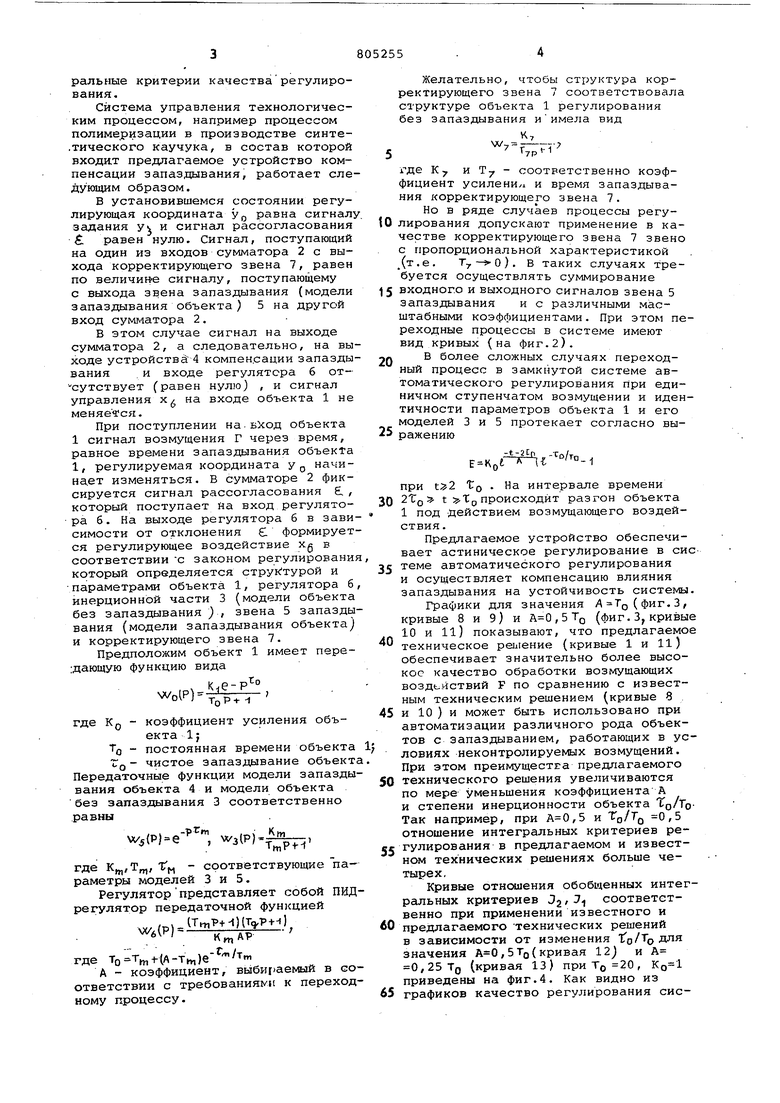
25 фиг.3-4 приняты следующие обозначения: УЗ сигнал задания, у регулирующая координата, Г возмущающее воздействие, Хб регулирующее воздействие, Xj сигнал на выходе i -го функционального блока, J-f , э интегральные критерии качества регулирования. Система управления технологическим процессом, например процессом полимеризации в производстве синте.тического каучука, в состав которой входят предлагаемое устройство компенсации запаздывания, работает сле дУюцщм образом. В установившемся состоянии регулирующая координата у равна сигнал задания уч и сигнал рассогласования S, равен нулю. Сигнал, поступающий на один из входов сумматора 2 с выхода корректирующего звена 7, равен по величине сигналу, поступающему с выхода звена запаздывания (модели запаздывания объекта ) 5 на другой вход сумматора 2. В этом случае сигнал на выходе сумматора 2, а следовательно, на вы ходе устройств 4 компенсации запазды вания , и входе регулятора 6 от- сутствует (равен нулю) , и сигнал управления х на входе объекта 1 не меняется. При поступлении на-вХод объекта 1 сигнал возмущения Г через время, равное времени запаздывания объекта 1, регулируемая координата у начинает изменяться. В сумматоре 2 фиксируется сигнал рассогласования Е, , который поступает на вход регулятора б. На выходе регулятора б в зави симости от отклонения формирует ся регулирующее воздействие xg в соответствии С законом регулировани который определяется структурой и параметрами объекта 1, регулятора б инерционной части 3 (модели объекта без запаздывания), звена 5 запазды вания (модели запаздывания объекта) и корректирующего звена 7. Предположим объект 1 имеет передающую функцию вида WolP)-. где KQ - коэффициент усиления объекта 1; TO - постоянная времени объекта TQ - чистое запаздывание объект Передаточные функции модели запазды вания объекта 4 и модели объекта без запаздывания 3 соответственно равны v,(p), -з1Р), где К,Т, Tf - соответствующие Ъараметры моделей 3 и 5. Регуляторпредставляет собой ПИД регулятор передаточной фун сцией t,,JT..MH....|, где TO +-(А -Ttv,) Тт А - коэффициент, выби аемый в соответствии с требованиями к переходному процессу. Желательно, чтобы структура корректирующего звена 7 соответствовала структуре объекта 1 регулирования без запаздывания иимела вид w, --, где К7 и Т7 - соответственно коэффициент усилени.1 и время запаздывания корректирующего звена 7. Но в ряде случаев процессы регулирования допускают применение в качестве корректирующего звена 7 звено с пропорциональной характеристикой Дт.е. Т.,). В таких случаях требуется осуществлять суммирование входного и выходного сигналов звена 5 запаздывания и с различными масштабными коэффициентами. При этом переходные процессы в системе имеют вид кривых (на фиг.2). В более сложных случаях переходный процесс в замкнутой системе автоматического регулирования при единичном ступенчатом возмущении и идентичности параметров объекта 1 и его моделей 3 и 5 протекает согласно выражению,. при to . На интервале времени 2То t Т,-, происходит разгон объекта 1 под Действием возмущающего воздействия. Предлагаемое устройство обеспечивает астиническое регулирование в сие теме автоматического регулирования и осуществляет компенсацию влияния запаздывания на устойчивость системы. Графики для значения (фиг.З, кривые 8 и 9) и ,5То (фиг. 3, кривые 10 и 11) показывают, что предлагаемое техническое решение (кривые 1 и 11) обеспечивает значительно более высокое качество обработки возмущающих воздействий F по сравнению с известным техническим решением (кривые 8 и 10 ) и может быть использовано при автоматизации различного рода объектов с запаздыванием, работающих в условиях неконтролируемых возмущений. При этом преимущества предлагаемого технического решения увеличиваются по мере уменьшения коэффициента А и степени инерционности объекта TQ/TOТак например, при ,5 и Тр/Тц 0,5 отношение интегральных критериев регулирования в предлагаемом и известном технических решениях больше четырех, Кривые отношения обобщенных интегральных критериев 2 1 соответственно при применении известного и предлагаемого технических решений в зависимости от изменения для значения ,5TO( кривая 12J и А 0,25 TO (кривая 13) приТо 20, приведены на фиг.4. Как видно из графиков качество регулирования сиетемы в случае применения технического решения увеличивается по сравнению со случаем применения в системе известного технического решения с уменьшением настроечного параметра А и отношения TQ/TO. в самых неблагоприятных случаях, когда Т0/То « качество регулирования в предлагаемо техническом решении, как минимум, в два раза выше, чем в известном.
Под обобщенным интегральным критерием в данном случае подразум вается критерий, включающий сумму квадрата отношения регулирующей координаты от заданного значения .квадрата производной отклонения, взятЪго с весом А, А - настроечный параметр системы автоматического регулирования.
Таким образом, применение предлагаемого технического решения ограничено классом объектов, передаточные функции которых могут быть представлены в виде последовательного соединения инерционной части и звена частого запаздывания, параметры которых в процессе функционирования изменяются в пределах +20% от их номинального значения. К таким процессам относится в частности,процесс полимеризации бутадиена в производстве синтетического каучука СКД. Функциональная схема Предлагаемого устройства достаточно просто может быть реализована с использованием элементов, работающих на постоянном или переменном токе. При такой реализации сумматор 2, выполненный, например, в виде дифференцт-ального усилителя, позволяет суммировать сигналы , Ху и Xj со своими коэффициентами усиления. Кроме того, в ряде случаев корректирующее звено 7 может быт введено в известное устройство с сохранением единичной связи между входами модели запаздывания объекта
to
и одним из входов сумматора (фиг.1, пунктир).
Это позволяет значительно расширить область применения предлагаемого технического решения.
15
Формула изобретения
Пневматическое устройство компенсации запаздалвания по авт.ев.№301689, отличающееся тем, что, 20 с целью повышения качества регулирования устройства, в нем вход звена запаздывания соединен с соответствуюгцей камерой сумматора через корректирующее звено.
. Ист.очники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 263016,. кл. G 05 В 17/00, 13.09.68
2.Авторское Свидетельство СССР 30 №310226, кл. G 05 В 5/01, 17.12.69.
3.Авторское свидетеУъство СССР
№ 301689, кл. G 05 В 17/00, 11.12.69.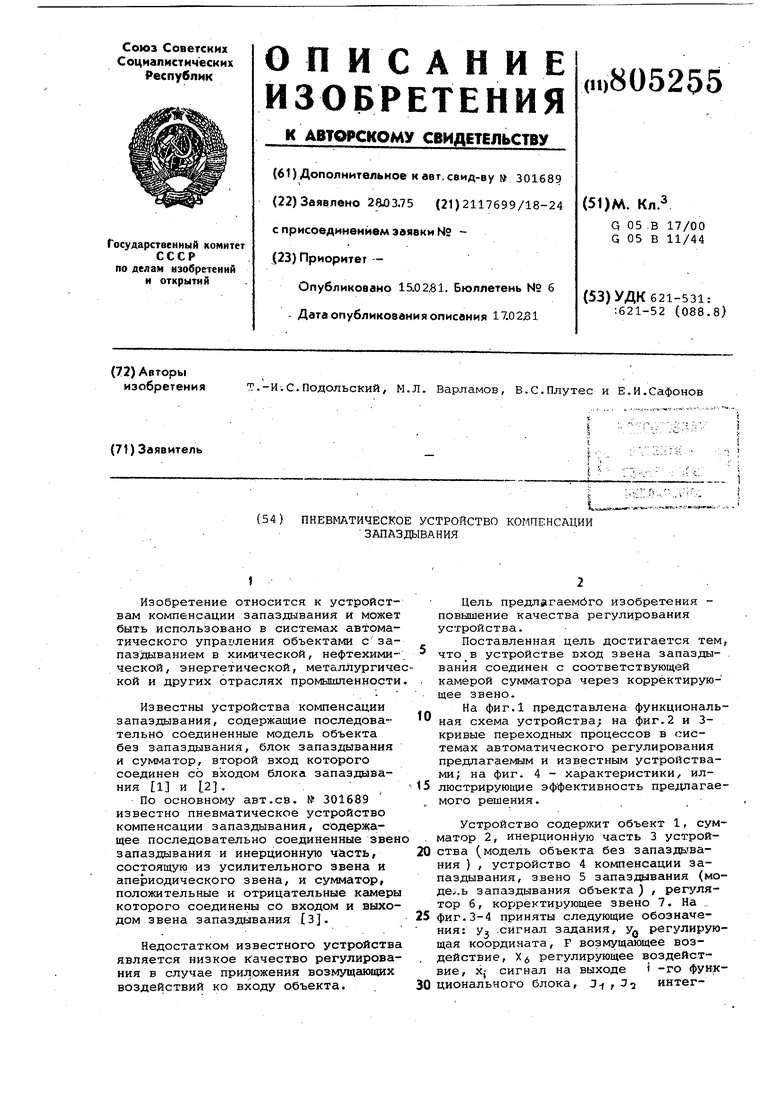
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования для объектов с запаздыванием | 1974 |
|
SU538339A1 |
| Регулятор для объектов с запаздыванием | 1986 |
|
SU1361503A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| СУПЕРВИЗОРНЫЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2157558C1 |
| Система управления для объектов с запаздыванием | 1984 |
|
SU1239686A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Система автоматического регулирования влажности агломерационной шихты | 1981 |
|
SU1032033A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2128358C1 |
| Устройство для компенсации запаздывания | 1985 |
|
SU1325403A1 |