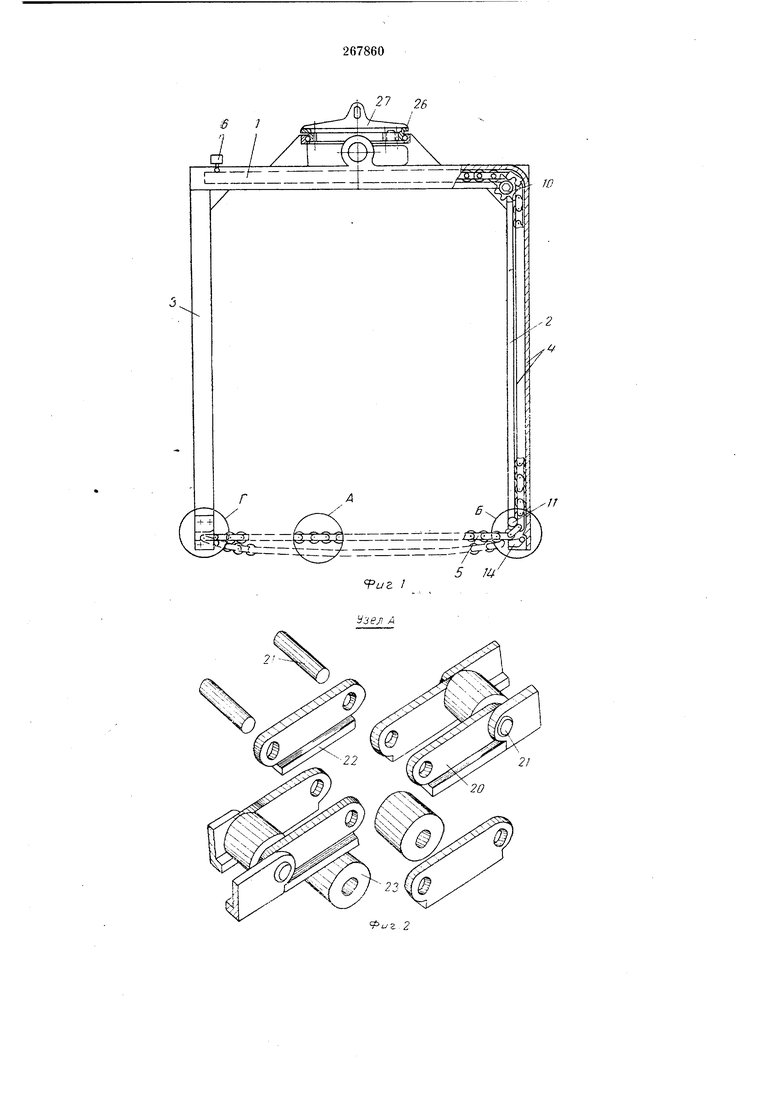
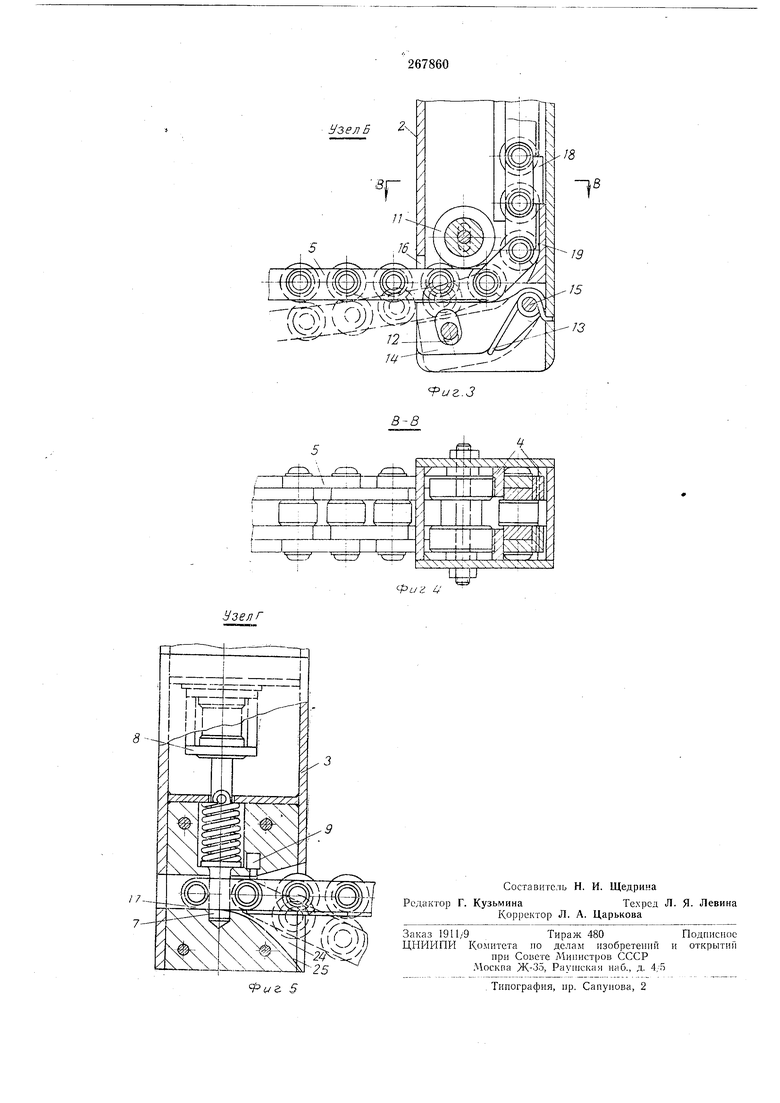
1-1зобретение может быть использовано в лесной промышленности. Известен захват для штабельных грузов, включаюш;ий прямоугольную раму с полыми стойками, нижние концы которых попарно соединены гибкими грузонесуш,ими органами, 11меюш,и,ги фиксаторы. Целью изобретения является повышение производительности, а также полная механизация процессов захвата и отцепки пакета. Достигается это тем, что грузонесущие органы захвата выполнены в виде шарнирно соединениях звеньев с упорами для ограничения их гибкости и установлены с возможностью возвратно-поступательного перемещения по направляющим, размещенным внутри полых стоек, нижние концы которых снабжены регулируемыми направляющими и для грузонесущих органов. Для повышения надежности ввода свободных концов грузонесуи.пх органов в приемные окна стоек последн ;е выполнены со скощенными направляющими, которые подпружинены пружиной. На фиг. 1 изображен описываемый захват; на фиг. 2 - гибкий грузонесущий орган, узел А на фиг. 1; па фиг. 3 - нижний конец стойки с выходным окном, узел Б на фиг. 1; на фиг. 4 - то же, разрез ио В - В на фиг, 3; на фиг. 5 - захват, узел Г на фиг. 1. Захват для штабельных грузов содержит прямоугольную раму /, по углам которой имеются четыре стойки 2 п 3 коробчатой формы. Внутри стойки 2 по направляющим 4 перемещается грузонесущий орган 5. На пути последнего установлен датчик 6, с которым он вступает во взаимодействие, посылая сигнал в систе.му управления захватом. Внутрп стойки 3 установлен фиксатор 7, например, с электрическим приводом 8 и электродатчик 9 для сигнализации о нормальном срабатывании фиксатора. Грузопесущий орган 5 перемещается возвратно-поступательно с помощью привода 10. На выходе грузонесущего органа из стойки 2 для падежной его работы установлен ролик // и регулируемая при помощи эксцентрика 12 иодиружиненная нружиной 13 направляющая 14, щарнирно установленная с помощью оси /5. Для регулировки направления выхода грузонесущего органа л из выходного окна 16 стойки направляющую 14 поднимают или опускают эксцеитриком 12. Для соединения свободного конца грузонесущего органа с фнксатором 7 стойки 3 имеется звено /7. Для ограничения выдвижения грузонесущего органа на нем укреплено звено с выступолг 18, а на стойке 2 укреплен ограничитель 1ый упор 9. Гибкий грузонесущий орган 5 выполнен из отдельных звеньев, 20, соединенных
шарпирно друг с другом осями 21 в пластинчатую цепь. Звенья 20 с одной стороны имеют упоры 22, которые взаимодействуют друг с другом и ограничивают подвижность грузонесущего органа в вертикальной плоскости. Ролнки 23 служат для снижения сил трення при движении грузонесущего органа 5 но направляющим 4 стойки 2.
Для обеспечения падежного ввода свободного конца грузонесущего органа 5 улавливающее окно 24 стойки 3 выполнено со скошенной отопорной плоскости направляющей 25.
Для придания захвату маневренности он снабжен разворотным, относительно вертикальной оси, устройством 26 с петлей 27, установленным на раме /.
Работает захват следующим образом.
Захват, нодвещенный на грузовой крюк грузоподъемного механизма нри помощи петли 27, подается к щтабелю грузов.
На сформированный щтабель, уложенный на нрокладки, имеющие толщину, несколько нревыншющую толщину грузонесущего органа 5, подают захват до упора стойками 2 и 3 в основание площадки. Затем включают привод 0 выдвижения грузонесущего органа, который, перемещаясь в направляющих 4 стойки 2, встречается с регулируемой нанравляющей 14.
При этом звенья 20 грузонесущего органа новорачиваются относительно осей 21 и меняют направление из вертикального в горизонтальное. При сходе с прямолинейного участка регулируемой нанравляющей 14 грузонесущий орган сохраняет горизонтальное положение за счет упоров 22. Кроме этого, его движение в вертикальной плоскости ограничивает спизу погрузочная площадка, а сверху - уложепный на прокладки груз. Привод 10 остается включенным до тех нор, пока грузонесущий орган 5 соединительным звеном /7 не войдет в улавливающее окно 24 стойки 3 с фиксатором 7 и не воздействует на датчик 5. Если свободный конец грузонесущего органа 5 в результате износа в щарнирах не нонадет точно в окно 24, то соединительное звено 17, скользя но плоскости 25, все равно войдет в окно стойки 3. Электродатчик 9 включает привод 10 выдвнжения грузонесущего органа, привод 8 фиксатора и зажигает сигпальную лампочку на пульте управления, информирующую о нормальном срабатывании замыкающего устройства.
После перемещения щтабеля и установки его на нрокладки в месте разгрузки включает-, ся привод 8 фиксатора, а затем - автоматически привод 10. Когда грузонесущий орган нолностью войдет в полость вертикальной
стойки 2, он воздействует на датчик 6, который выключает привод 10, и захват свободно ноднимается.
Предмет изобретения
20
1.Захват для щтабельных грузов, например лесоматериалов, включающий прямоугольную раму с полыми стойками, нижние концы которых попарно соединены гибкими грузонесущими органами, имеющими фиксаторы, отличающийся тем, что, с целью повышения производительности, а также полной механизации процесса захвата пакета и его отцепки, грузонесущие органы захвата выполнены в виде
ншрнирно соединенных звеньев с упорами для ограничения их гибкости и установлены с возможностью возвратно-ностунательного перемещения по направляющим, размещенным внутри полых, стоек, нижние концы которых
снабжены регулируемыми направляющими для грузонесущих органов.
2.Захват по п. 1, отличающийся тем, что, с целью новыщения надежности ввода свободных концов грузопесущих органов в нриемные
окна стоек, последние выполнены со скошенными направляющими.
3.Захват по п. 1, отличающийся тем, что направляющие грузонесущих органов выполнены подпружипенными.
6 1
27 26
JO
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для штабельных грузов | 1972 |
|
SU436783A1 |
| ЗАХВАТ ДЛЯ ШТАБЕЛЬНЫХ ГРУЗОВ | 1972 |
|
SU329107A1 |
| Захватное устройство для штабельных грузов | 1976 |
|
SU679509A1 |
| Захват для пакетов штабельных грузов | 1972 |
|
SU619442A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Поперечный конвейер | 1986 |
|
SU1406078A1 |
| Телескопический захват для грузоподъемных машин | 1975 |
|
SU649640A1 |
| Шаговый механизм для перемещения груза | 1990 |
|
SU1742200A1 |
| Подъемник-накопитель грузов | 1988 |
|
SU1532452A1 |
| ТЕЛЕЖКА ДЛЯ ТРАНСПОРТИРОВКИ И СТЫКОВКИ БЛОКОВ | 2004 |
|
RU2273587C1 |