Изобретение относится к грузозахватным устройствам грузоподъемных машин, преимущественно стеллажных крановштабелеров. Грузозахваты таких кранов выдвигаются в горизонтальной плоскости поперек направления движения крана по одну или обе стороны выборочно в ячейки стеллажей для приема находящихся там грузов или их установки.
Известен телескопический захват для кранов-штабелеров, содержащий ненодвижную секцию и установленную на роликах выдвижную секцию, связанную с механизмом ее выдвижения ,1.
Недостатком данного захвата является то, что подъем захвата до уровня полок стеллажа и установка или съем груза с полки осуществляются одним общим приводом подъема со сложной системой управления им.
Известен телескопический захват для грузозахватных мащин, преимущественно для стеллажных кранов-штабелеров, содержащий неподвижную секцию и установленную на роликах, закрепленных на поворотных от привода осях, по меньшей мере одну подъемную выдвижную секцию, связанную с механизмом ее выдвижения и подъема 2.
Недостатком данного захвата является некомпактность по высоте его выдвижной части, требующей место для размещен1 я ней механизма небольщого приподнимання грузовой площадки, в результате чего высота ячеек стеллажей должна быть больще, чем при применении телескопических захватов без механизма небольшого приноднимания.
Целью изобретения является сокращение габаритов захвата по высоте.
Это обеспечивается тем, что каждая ось имеет один экснентрично смещенный относительно нее конец, на котором закреплен ролик, причем конец каждой последующей в направлении выдвижения секции оси смещен на больщую величину, чем конец предыдущей оси, а другие концы всех осей соединены между собой общим приводо.м поворота осей; кро.ме того, привод поворота осей содержит силовой цилиндр и параллелограммный четырехзвенник, включающий общую тягу, связанную с цилиндром, и рычаги, связывающие ее с каждой из осей.
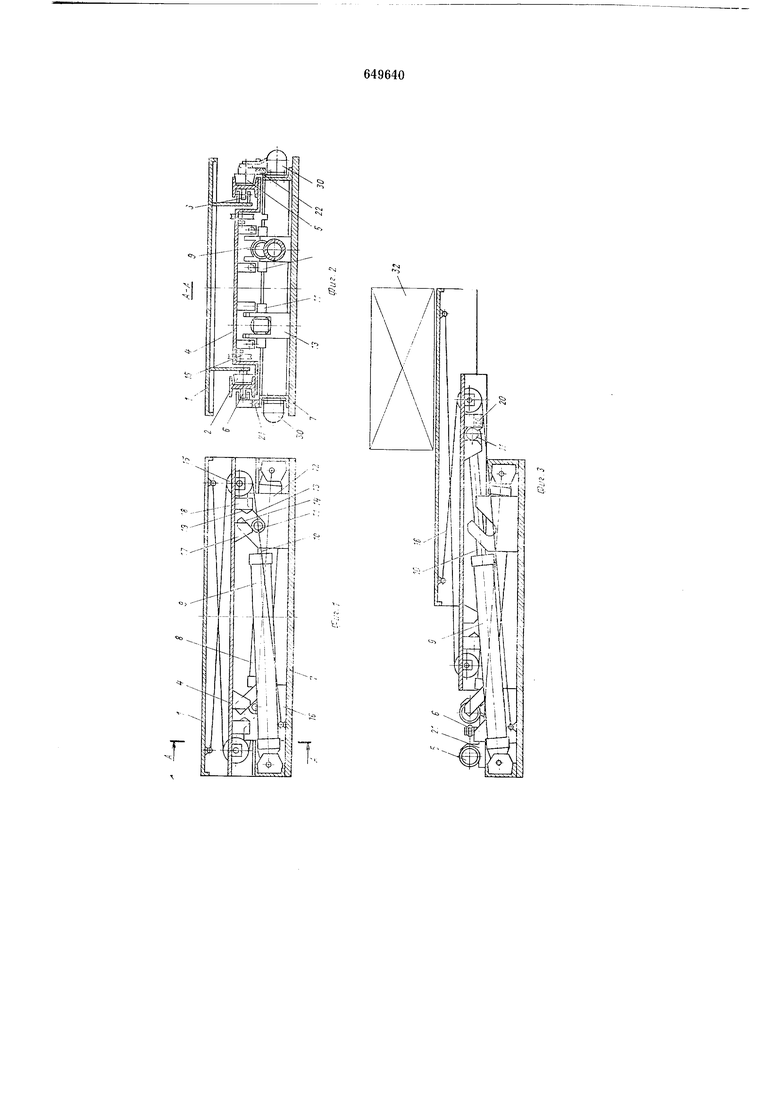
На фиг. 1 изображен предложенный захват в нейтральном положении, общий вид в разрезе; на фиг. 2 - разрез .4-А г. фиг. 1; на фиг. 3 - захваты в выдвинуто.ч положении, общий вид в разрезе; на
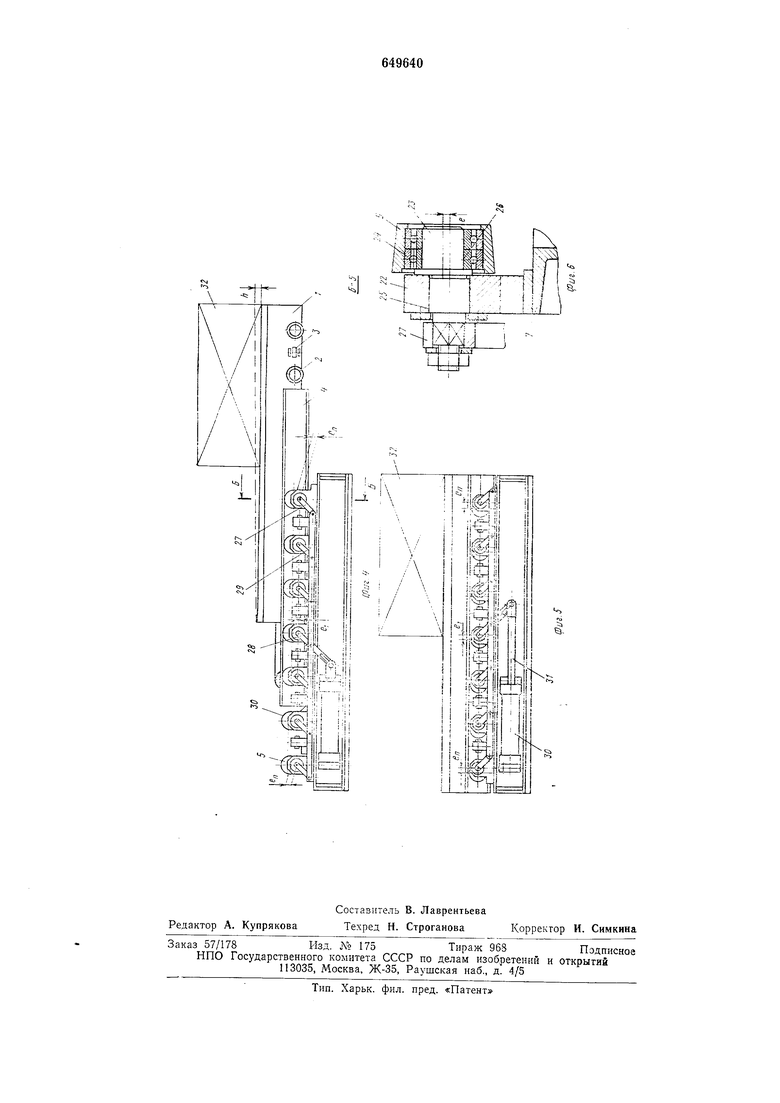
фиг. 4 - то же, в выдвинутом и приподнятом положении; на фиг. 5 - то же, в нейтральном положении; на фиг. 6 - разрез Б-Б на фиг. 4.
Телескопический захват состоит из выдвижной грузонесущей секции /, направляющих ее роликов 2 и 3, выдвижной пр омежуточной секции 4, направляющих ее роликов 5 и 6, неиадвижной секции 7 и механизмов выдвижения и небольшого приподнимания выдвижных секций. Наиравляющие ролики 2 и 3 закреплены подвижно на грузонесущей, а ролики 5 и 6 - на неподвижной секциях.
Привод механизма выдвижения содержит ,два качающихся гидроцилиндра 8 и 9, которые шарнирно прикреплены своими корпусами к неподвижной секции и расположены вдоль захвата параллельно друг к другу в направлении навстречу своими штоками. На концах штоков 10 запрессованы пальцы //.
На неподвижной секции по ходу выдвижения штоков закреплены стойки 12, в которых выполнены наклонные пазы 13, открытые и с подъемол в сторону выдвижения штоков. Часть стоек 12, обращенная внутрь захвата, изготовлена выше но отношению к наружной и имеет упор. 14На концах нромежуточной секции закреплены подвижно блоки 15, через которые перекинуты тросики 16, одним концом соединенные с неподвижной, а другим - с грузонесущей секциями. На этой же секции по обеим сторонам относительно стоек 12 закреплены упоры 17 и 18, образующие меледу собой вертикальные пазы 19 шириной, равиой диаметру пальцев 11. На наружных упорах 18 со стороны паза 19 смонтированы подпрул иненные фиксаторы 20.
Механизм небольшого приподнимания устроен следующим образом. Но бокам неподвижной секции 7 закреплены стойки 21 и 22, в которых смонтированы горизонтально поворачивающиеся оси 23 с подшипниками 24 качения. Оси своей средней частью 25 закреплены в стойках, и концами 26, выполненными с эксцентриситетом е относительно их закрепленной части, обращены внутрь захвата (см. фпг. 6). На концах осей на подшипниках 24 качения надеты ролики 5. Причем величина эксцентриситета для крайних роликов больше, чем величина эксцентриситета для среднего из роликов, т. е. (см. фиг. 4).
На наружных концах осей 23 закреплены рычаги 27 и 28, соединенные на других концах юбщей тягой 29 и образуЕОЩие в совокупности параллелограммные механизмы по обе стороны захвата. По бокам неподвижной секции смонтированы гидроцилиндры 30, штоки 31 которых соединены с параллелограммными механизмами посредством удлиненных рычагов 28.
Захват служит для приема и установки грузов 32, храняшихся, нанрнмер, в стеллажах.
Описанный захват работает следующим образом.
При съеме груза захват грузонес)щей секцией 1 устанавлнвается на зфовне несколько груза. При этом грузонесущая секция находится в нейтральном положении, пальцы // штоков гидроцилиндров 8 и 9 - в наклонных пазах 13, а концы 26 под ролики 5 располагаются в одной горизонтальной плоскости с их осями 23. При включении гидроцилиндра 9 его шток 10 выдвигается и с помощью пальца 11 направляется по наклонному назу 13 стойки 12, попадая в паз 19 на промежуточной . секции 4. В этом положении палец удерлсивается подпружиненным фиксатором 20.
При дальнейшем выдвижении штока 10 происходит выдвижение промежуточной секции 4, а с нею и грузонесущей секции /. Причем гр)узонесущая секция выдвигается в два раза быстрее промежуточной. Выдвиженке секций производится примерно па половину их длины. В результате грузонесущая секция подводится под груз 32. Для прииоднимания груза, например, над полкой ячейки стеллажа, включаются
гндроцилнпдры 30, штоки 31 которых, втягиваясь, перемещают тягу 29 из правого крайнего положения в левое посредством удлиненного рычага 28. В результатерычаги 27 и 28 поворачивают оси 23 роликов 5
иа угол 90°. При этом концы 26 осей 23 под ролики 5 располагаются в одной вертикальной нлоскости вместе с их осями 23, поднимаясь на величину эксцентриситета. Причем, благодаря размещению концов
иа осях с увеличивающимся эксцентриситетом в сторону выдвижения секций, конец грузопесущей секции до соприкосновения с грузом поднимается отиосительно своего горизонтального пололсения на некоторую
величину /г (см. фиг. 4). Ролики 5 поднимаются, приподнимая промелсуточную 4, я с нею и грузонесущую / секции. И груз приподнимается над ПОЛКОР стеллажа. При этом под действием, например, установленного груза грузоиесущая секция выравнивается до горизоитального положения.
Для вдвижения захвата с грузом в нейтральное положение масло подается в другую полость гидроцилиндра 9. Шток 10,
вдвигаясь, возвращает промежуточную, а с нею и грузоиесущую секции в нейтральное положение. При этом палец 11 штока упирается в упор 14 стойки 12 и выходит из зацепления с промежуточной секцией.
В нейтральном положении секция удерживается, например, подпружиненным фиксатором.
Для опускания груза 32 на захват в пейтральиом его положении масло подается в другую полость гидроцилиндров 30.
Штоки 31 выдвигаются, поворачивая посредством параллелограммного механизма рычаги 27 и 28, в результате чего оси 23 роликов 5 разворачиваются на угол 90°, занимая положение, когда конец 26 под ролики 5 расположится в одной горизонтальной плоскости с их осями 23. Причем гидродилиндры 30 включаются в момент иодхода пальца 11 к упору 14.
Для обеспечения установки груза на полку стеллажа весь цикл повторяется, но в обратной последовательности.
Для выдвижения захвата в другую сторону включается гидроцилиндр 8, и весь цикл работы повторяется в той же последовательности.
Формула изобретения
1. Телескопический захват для грузоподъемных машин, преимущественно стеллажных кранов-штабелеров, содержащий неподвижную секцию и установленную на роликах, закрепленных на поворотных от привода осях, по меньщей мере одну подъемную выдвижную секцию, связанную с механизмами ее выдвил ения и подъема, отл и ч а ю щ и и с я тем, что, с целью уменьшения габаритов захвата по высоте, каждая ось имеет один эксцентрично смещенный относительно нее конец, на котором закреплен ролик, причем конец каждой последующей в направлении выдвижения секции оси смещен на больщую величину, чем конец иредыдущей оси, а другие
концы всех осей соединены между собой общим приводом поворота осей.
2. Захват по п. 1, о т л и ч а ю ш, и и с я тем, что привод поворота осей содержит С11ЛОВОЙ цилиндр и параллелограммный
четырехзвенник, включающий общую тягу, связанную с цилиндром, и рычаги, связывающие ее с из осей.
Источники информации, принятые во вниманпе при экспертизе:
1.Патент Франции № 2024217, кл. В 65 G 1/00, 1970.
2.Зерцалов А. И., Певзнер Б. И., Подкопаев А. Ф. Стеллажные краны-штабелеры
на механизированных складах за рубежом. М., 1967, с. 33, фиг. 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1418206A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Телескопический захват | 1986 |
|
SU1463646A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1011468A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1082706A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1024393A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1983 |
|
SU1181953A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |