Известны устройства для путевого программного управления с жесткой программой, обеспечиваемой набором соответствующих кулачков, установленных на одном валу, нриводимом в движение самим исполнительным механизмом.
Предложенное устройство отличается от известных тем, что содержит механизм, с помощью которого можно реверсировать направление вращения кулачкового вала, а таклсе установить начало программы в любом месте по углу. Это дает возможность быстро перенести программу из одного квадранта в другой. Кроме того, устройство может содержать два однотипных реверсируемых кулачковых вала, связанных раздельно с исполнительными механизмами мащины (например, с механизмами поворота и подъема стрелы крана). В этом случае возможности варьирования программы значительно расщиряются.
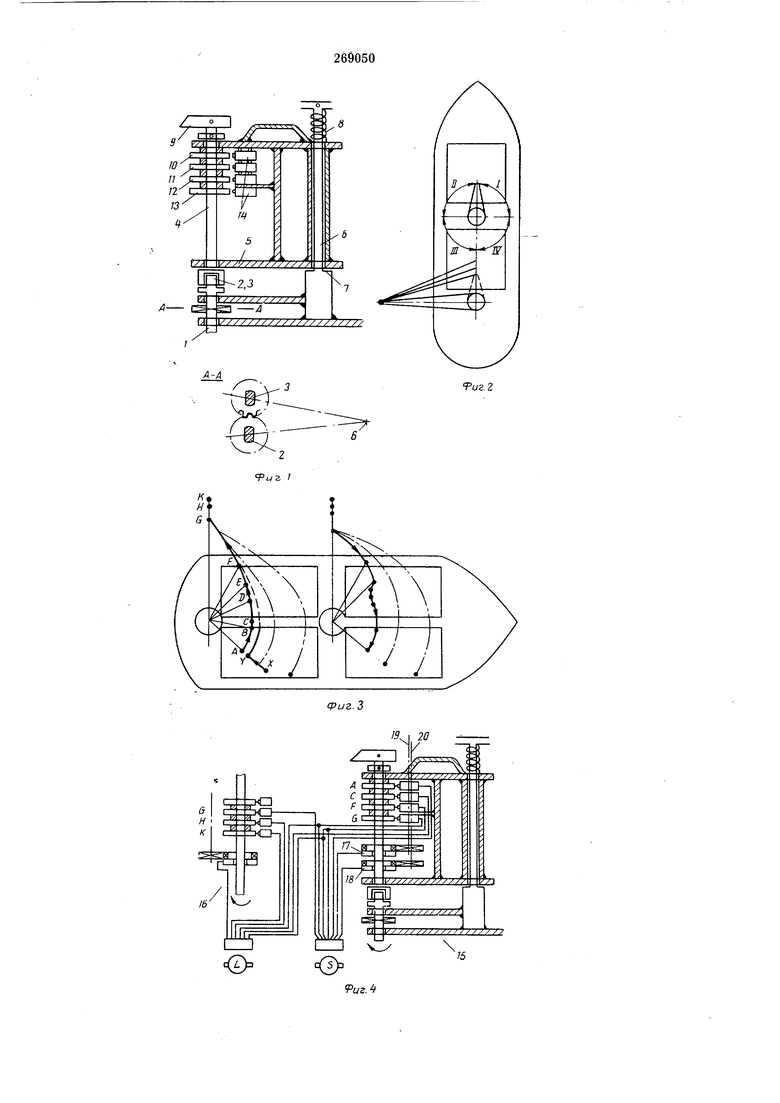
Па фиг. 1 приведена конструкция устройства; на фиг. 2 показан пример применения устройства для управления судовыми кранами; на фиг. 3 представлен запрограммированный путь груза на корабль; на фиг. 4 даны принципы управления на этом пути с помощью двух командоаппаратов.
привода и т. д.) соединен с поворотным валом крана или иного транспортного средства и может быть по выбору соединен с каждым из имеющихся двух выходных валов 2 и 3. Один
из них 2 непосредственно соединен с валом 1 и вращается в том же направлении, что и последний. Другой соединяется при помощи механической передачи с валом 2 и вращается в направлении, противоположном последнему.
Устройство снабжено также повортным валом 4, который предназначается для соединения с валом 2 или 3 и для вращения в.месте с одним из них после соединения. Поворотный вал 4 может смещаться в осевом наиравлении; таким образом он может быть отсоединен от своего приводного вала и передвинут в другое положение. Вал 4 укреплен в раме 5, которая можег вращаться вокруг центрального вала 6. Рама 5 удерживается на стопоре 7
центрального вала действием 8.
Поворотный вал 4 может также быть повернут на некоторый угол, например 180°, после того, как он был поднят рукЬяткой 9 и соединен с тем же или с другим из приводных валов 2 или 3. Па валу 4 установлены кулачковые диски 10-13, которые могут быть закреплены на валу в желаемом положении в зависимост от установленной программы перемещения. Кулачковые диски (которые могут
их поворотного движения воздействуют на устройство 14 (могущее быть электрическим, гидравлическим или пневматическим), которое включает соответствующий электродвигатель на ту или иную скорость для перемещения или поворотного движения стрелы крана.
Если необходимо выбрать квадрант (например, /), то поворотный вал 4 соединяется, например, с выходным валом 2, когда рукояткой 9 он установлен в некотором определенном положении noBOpdVa. Если рукоятку 9 повернуть на 180° перед соединением с валом 2, то желаемая программа получается для квадранта ///. Если в первом поворотном положении вал 4 соединен с валом 3, то получаегся квадрант П, а после поворота рукоятки 9 на 180° - квадрант IV., (Направление вращения поворотного двигателя регулируется самостоятельными средствами).
Описанный командоаппарат может быть применен для всех устройств, поворачивающихся вокруг некоторого вала, для передвижений в пределах различных секторов, в случаях, когда требуется программирование этих передвижений.
В качестве примера на фиг. 3 дан запрограммированный путь груза на корабль.
В точке А (см. фиг. 3) начинается поворот ири полной скорости двигателя поворота (обозначен условно буквой 5 на фиг. 4). В точке В вступает в действие специальное включающее средство для двигателя перемещения стрелы (буква ее на фиг. 4).
Программное устройство 15 для поворота перемещается под действием движения поворота по стрелке. В программу движения могут быть внесены изменения при переходе в различные квадранты или рабочие секторы. Скорость двигателя может быть постоянной или иеремепной. Устройство 15 может быть повернуто в иное положение соединения, причем будет получено противоположное направление вращения.
В положении С двигатель перемещения стрелы запускается под воздействием средств кулачкового диска, и скорость его нарастает. В точке F движение поворотного двигателя задерлсизается. В точке G поворотное движение прекращается, а горизонтального перемещения ускоряется с тем, чтобы быть замедленным в точке Н и полностью приостановленным в точке К..
Программирующее устройство 16 для горизонтального перемещения и изменения вылета стрелы управляется движением горизонтального перемещения и, как можно видеть, в некоторых положениях воздействует на поворотный двигатель точно так же, как программное устройство 15 для поворота в некоторых пололсениях воздействует на двигатель горизонтального перемещения. Возможно также предусмотреть в этих программирующих устройствах как для поворота, так и для горизонтального перемещения и изменения вылета стрелы некоторые полол ения для быстрой установки, так что становится возможным
производить быструю регулировку на иные требуемые концевые полол ения.
Два криволинейных диска 17 и 18 установлены с возможностью скольл ения на валу, и при помощи стержней 19 и 20 могут быть
установлены надлежащие конечные или промежуточные нолол ения. Например, кран может быть доведен до некоторого желаемого полоЛсения без использования программирующего устройства, после чего стержни поворачиваются в то же самое положение (что может сигнализировать ири помощи ламп или иным сходным образом), чем устанавливается запрограммированное конечное положение. В этом случае кран следует при подключенном программирующем устройстве по вновь заданному пути. Если радиус работы превыщается, например, в положении X, то горизонтальное перемещение с изменением вылета стрелы быть начато в этой точке до
положения У, когда двигатель изменения вылета стрелы останавливается и начинается поворот влево. При непрерывно продолжающемся повороте влево груз следует затем по пунктирной линии.
Устройство может найти применение для программного управления различными грузоподъемными мащинами.
Предмет изобретения
1.Устройство для путевого программного управления, содержащее вал с кулачками и соответствующие контактные элементы, отлича1ои,еесл тем, что, с целью ускоренной переналадки жесткой программы без замены кулачков, оно содержит механизм реверсирования с двумя выходными валами, к которым по выбору в зависимости от программы присоединяют кулачковый вал, кулачки которого
раздельно или вместе устанавливают под произвольным углом относительно вала.
2.Устройство по п. 1, отличающееся тем, что, с целью расширения функциональных возмолсностей, в нем установлены два однотнпных реверсируемых кулачковых вала, связанных раздельно с исполнительными механизмами мащины.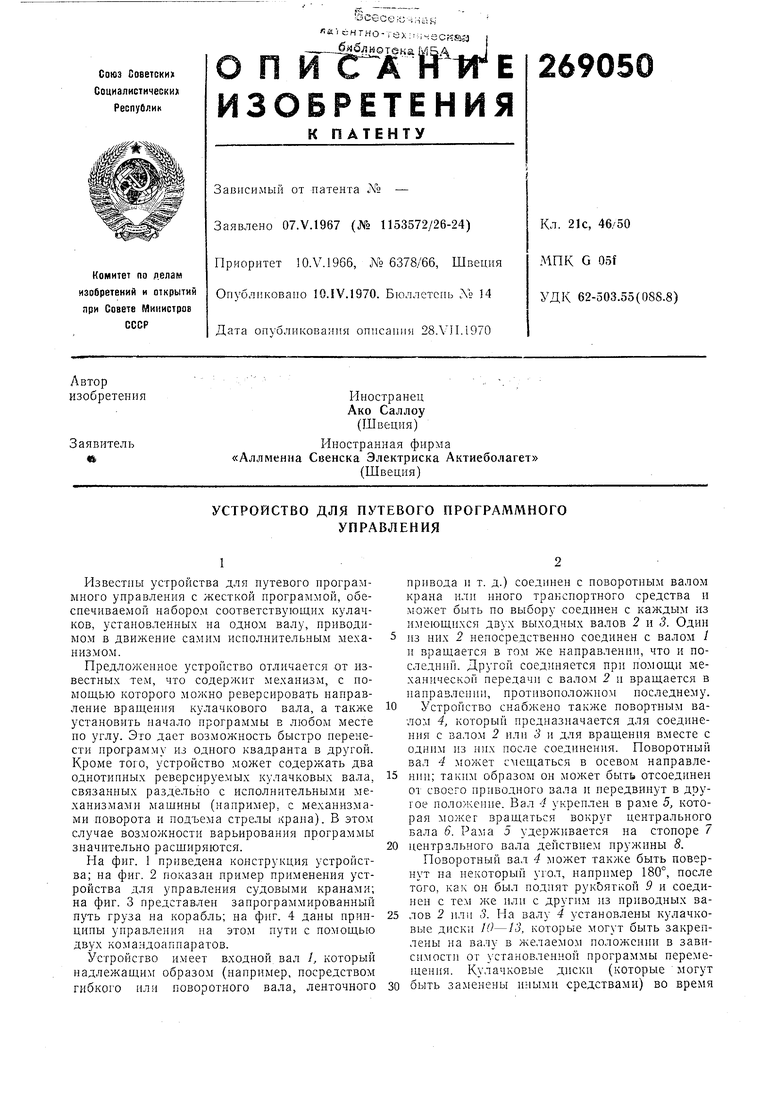

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления механизмами поворота и изменения вылета стрелы грузоподъемного крана | 1967 |
|
SU464099A3 |
| Устройство для программного управления манипулятором | 1980 |
|
SU903812A1 |
| Устройство для автоматического управления исполнительным механизмом | 1974 |
|
SU535551A1 |
| Устройство для выбрасывания мячей | 1981 |
|
SU1342516A1 |
| Система управления гидравлическим манипулятором лесозаготовительной машины | 1979 |
|
SU861063A1 |
| КРАН С КРАНОВЫМ КОНТРОЛЛЕРОМ | 2020 |
|
RU2772140C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫЛЕТА В УСТРОЙСТВЕ БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271986C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ СКОЛЬЗЯЩЕГОКОНТАКТА Л1 | 1966 |
|
SU177447A1 |
| Кран со стрелой изменяемого вылета | 1958 |
|
SU116939A1 |
| Предохранительное устройство, предотвращающее перегрузку стрелового автомобильного крана | 1953 |
|
SU98589A1 |