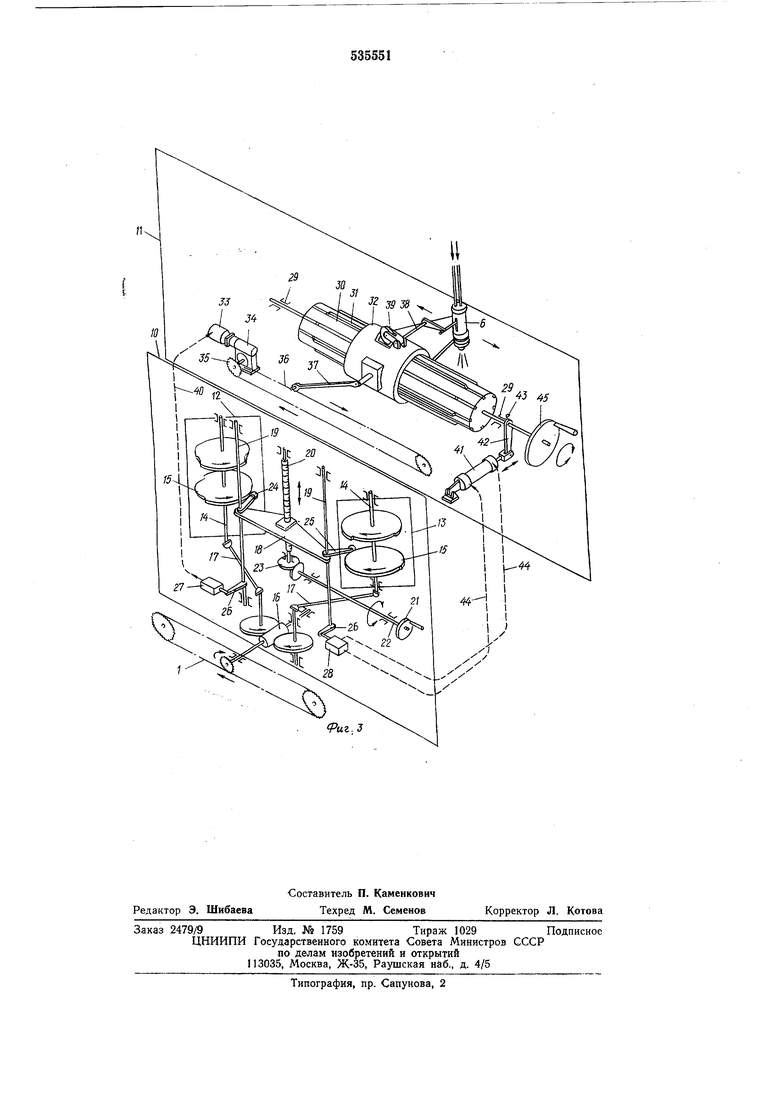
взаимодействующих с соответствующими кулачковыми дисками; а каретка выполнеиа в виде полого цилиндра, охватывающего программный иоворотный барабан, снабженного подпружиненным роликом, взаимодействующим с соответствующим кулачком барабана и соединенного посредством рычагов с распылителем. На фиг. 1 изображена установка для нанесения покрытий - вид сбоку; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - принципиальная схема устройства для автоматического управления исполнительным механизмом (распылителем покрытия). Установка для нанесения покрытия на крупногабаритные плоские изделия содержит конвейер 1, предназначенный для перемещения установленного на нем изделия 2 по постам обработки. Перемещение конвейера обеспечивается приводом 3. В начале конвейера 1 размещен подъемник 4, с помощью которого изделие 2, обычно подаваемое на установку в вертикальном положении (наиример мостовым краном), устанавливается на конвейере в исходное горизонтальное положеиие. На фундаменте конвейера 1 неподвижно закреплены камеры 5. В их верхней части (над обрабатываемым изделием) установлены распылители 6, каждый из которых снабжен индивидуальным приводом, обеспечивающим их возвратно-поступательное перемещение поперек направления движения (стрелка Б) изделия 2. К каждому распылителю 6 по системе трубопроводов подается соответствующее покрытие, которое наносится на поверхность изделия 2 по заданной программе, обеспечиваемой устройствами 7 для управления распылителями 6. Каждая камера 5 комплектуется одним устройством 7 для управления распылителями 6. За камерами 5 по ходу движения изделия 2 расположены сущильные камеры 8, предназначенные для формования (сушки) нанесенного покрытия. В коице конвейера 1 размещен подъемник 9, необходимый для поворота готового изделия в вертикальное положение для его съема и последующей транспортировки на склад готовой продукции. Установка содержит также устройство 7 для управления распылителями 6. Устройство 7 содержит: блок 10 задания последовательности нанесения покрытия и несколько, в соответствии с числом распылителей 6, программных исполнительных механизмов 11, каждый из которых взаимодействует с блоком 10 задания при помощи гидравлической связи. Блок 10 задания последовательности нанесения покрытия является основным органом автоматического обеспечения последовательности выполнения операций нанесения покрытия на изделия по заданной программе, в зависимости от конфигурации, габаритов излТ,елия и рисунка покрытия. Информация о характере обработки изделий заложена в двух кулачковых программных механизмах 12 и 13, каждый из которых обеспечивает программу последовательности нанесения покрытия на изделии в определенном направлении: механизм 12 - вдоль изделия, а механизм 13 - поперек изделия. Каждый из механизмов 12 и 13 представляет собой установленный на двух опорах вал 14, на котором неподвижно установлен ряд сменных кулачковых дисков 15. Профиль дисков выполнен с учетом требований программы последовательности нанесения покрытия для конкретного изделия. Механизмы 12 и 13 кинематически связаны с конвейером 1 через редуктор 16 и карданные валы 17, чем обеспечивается синхронное вращение дисков 15. Для получения заданной программы последовательности нанесения покрытия и управления механизмом 11 предусмотрен механизм установки программы, выполненный в виде траверсы 18, закрепленной на направляющих поворотных осях 19 с возможностью ее перемещения вдоль них при помощи вала 20, вращение которому передается от щтурвала 21 через вал 22 и редуктор 23. На осях 19 подвижно установлены щупы 24 и 25. Перемещение которых по направляющим осям 19 и установка их против соответствую1ЦИХ кулачко1В осуществляется траверсой 18. Рычаги 26, неподвижно закрепленные на осях 19, воздействуют на золотники 27 и 28 управления приводами механизма 11. В зависимости от числа распылителей 6, установленных в камере 5, а следовательно, и числа .механизмов 11, выбирается соответствующее число щупов 24 и 25, осей 19, рычагов 26 и золотников 27 и 28 управления. Так, например, в том случае, когда в камере 5 установлено три распылителя, то в блоке 10 задания устанавливаются шесть направляющих поворотных осей 19 (по три на каждый из механизмов 12, 13) и соответствующее число щупов 24 и 25, рычагов 26 и золотников 27 и 28 управления. Программный исполнительный механизм И предста;вляет собой установленный в опорах 29 поворотный программный барабан 30, на поверхности которого вдоль образующих расположены сменные кулачки 31, длина которых соответствует щирине участка покрытия. Каретка 32 с жестко закрепленным на ней распылителем 6, имеет возможность совершать возможность соверщать возвратно-поступательное перемещение вдоль барабана 30. Перемещение каретки 32 осуществляется приводом, состоящим из гидромотора 33, соединеиного с редуктором 34, на выходном валу которого закреплена звездочка 35, приводящая в движение цепной контур 36. На контуре 36 щарнирио закреплен рычаг 37, другой конец которого также щранирно соединен с кареткой 32. На каретке 32 щарнирно закреплена рычажная передача 38, управляющая с помощью ролика 39, постоянно контактирующего с кулачком 31, клапаном форсунки распылителя 6.
Работой гидромотора 33 через систему трубопроводов 40 управляет золотник 27.
Поворот барабана 30 в необходимое положение обеспечивается гидроцилиндром 41, шток которого шарнирно соединен с рычагом 42, закрепленным при помощи стопора 43 на валу барабана 30.
Установка штока гидропилнндра 41 в крайние положения определяет фиксированное положение барабана 30, когда один из кулачков 31 находится точно под роликом 39. (В зависимости от сложности характера рисунка покрытия может быть установлено несколь-ко кулачков 31, но в описываемом варианте установки количество кулачков 31 ограничивается ДВУМЯ).
Перемещение штока гидропилиндра 41 осуществляется золотниками 28 через систему трубопроводов 44.
Так как в процессе нанесения покрытия на данное изделие в конкретном случае используется максимально два кулачка 31 например, один - для сплошного, а другой для прерывистого нанесения покрытия, а на поворотном барабане 30 для обеспечения достаточного количества программ нанесения покрытия на различные изделия :может быть установлено несколько кулачков (порядка 12), то первоначальный поворот барабана 30 в заданный сектор, определяемый двумя, рядом расположенными, кулачками, осупхествляется с помощью штурвала 45, неподвижно закрепленного на валу барабана 30, при этом столор 43 поднимается, создавая возможность поворота барабана относительно рычага 42.
Подлежащее обработке изделие 2 с помощью подъемника 4 устанавливается в горизонтальном положении на конвейере 1.
В соответствии с заданием на обработку изделия выполняются следующие операции: подключается К -питающей гидоавлической сети необходимая пара золотников 27 и 28 управления исполнительным механизмом 11. В случае, если при обработке изделия 2 используются несколько распылителей 6. находящихся в данной камере 5, то к питающей гидравлической сети подключается соптветствующее количество пар золотников 27 и 28.
Щупы 24 и 25 устанавливаются против соответствующих к лачковых дисков 15. Перемещение щупов по направляющим поворотным осям 19 осуществляется тпаверсой 18 с помощью щтурвяла 21. вала 22, редуктора 23 и вала 20.
Барабан 30 с помоп1ью штупвала 45 поворачивается относительно опор 29 и рычага 42 и устанавливается в исходном положении. При этом стопор 43 поднимается, давая возможность барабану 30 повернуться относителтлю рычага 42.
После выполнения перечисленных операций включается привод 3 перемещения конвейера 1.
При перемещении конвейера 1, через кинематическую связь, включающею в себя редуктор 16 и -карданные валы 17, происходит вращ,ение К}лачко5ых програм-мных механизмов 12 и 13. Когда изделие 2 входит в камеру 5 и находится под соответствующим распылителем 6, кулачковый диск 15, закрепленный на валу 14 механизма 12, набегает на щуп 24 и поворачивает его. Щуп 24, в свою очередь, поворачивает направляющую ось 19, которая при помощи рычага 26 воздействует на золотник 27 управления.
Золотник 27 управления через систему трубопроводов 40 обеспечивает питание гидромотору 33, который через редуктор 34, звездочку 35 приводит в движение цепной контур 36. Рычаг 37, шарнирно закрепленный одним концом на пепцом контуре 36, а другим концом на каретке 32, осуществ,ляет ее возвратно-поступательные перемещения по барабану 30.
Одновременно кулачковый диск 15 набегает на щуп 25. который поворачивает направляющую ось 19. Последняя, в свою очередь, через неподвижно закрепленный на ней рычаг 26 воздействует на золотник 28 управления, который через систему трубопроводов 44 подает питание к гидроцилиндру 41. Щток гидроцилиндра, перемегцаясь, поворачнвает с помош,ью рычага 42 и стопора 43 барабан 30.
В этом положении подпружиненный ролик 39 ориентируется над кулачком 31. При перемещении каретки 32 ролик 39 набегает на кулачок 31 и через рычажную передачу 38 управления клапаном распылителя 6, обеспечивает
нанесение покрытия поперек изделия по заданной программе.
Если ролик 39 перемещается по выступающей поверхности кулачка 31, то происходит подача покрытия на изделие (клапан распылителя открыт). В местах, где нужно нрекратить подачу покрытия, например, применительпо к строительным изделиям, в местах расположения оконных или дверных проемов, ролик 39, копируя поверхность кулачка 31,
опускается, и через рычажную передачу закрывает, клапан распылителя 6.
Профиль кулачкового диска 15 выполнен с учетом, в случае необходимости, изменения программы нанесения покрытия поперек изделия. Это осупдествляется следующим образом.
ЩУП 25, копируя профиль кулачкового диска 15, поворачивает направляющую ось 19, которая через рычаг 26 воздействует на золотник 28 управления. В этом случае питание по системе трубопроводов 44 подается в .другую полость гидропилиндра, HITOK которого поворачивает баоабан 30. Таким образом, ролик 39 оказывается сориентированным над
другим кулачком. Профиль этого кулачка соответствует другой программе нанесения покрытия поперек изделия 2.
Использование предлагаемого устройства позволяет в значительной степени механизировать и автоматизировать процесс нанесения
7
различного рода покрытий на крупногабаритные плоские изделия, сократить при этом затраты труда па выполнепие этих работ, резко повысить качество покрытия, особенпо в случае сложного характера его рисунка, и сократить, как за счет уменьшения отходов, так и за счет соблюдения заданной толпдины покрытия, расходы материала покрытия на 20%.
Формула изобретения
1. Устройство для автоматического управления исполнительным механизмом, например, распылителем в установках для нанесения покрытий на плоские изделия, перемещающиеся на конвейере, включающее программный поворотный барабан с кулачками и приводом, соединенный посредством золотников управления с приводом исполнительного механизма, отличающийся тем, что, с целью обеспечения нанесения покрытия на плоские изделия сложной конфигурации и снижения расхода материалов покрытия, оно снабжено блоком задания последовательности нанесения покрытия, выполненным в виде установленных на приводных валах кулачковых дисков, взаимодействующих посредством рычажной системы с золотниками управления приводами программного поворотного барабана и исполнительного механизма, причем послед8
НИИ снабжен кареткой, установленной с возможностью перемещения на программном поворотном барабане при помощи привода исполнительного механизма.
2. Устройство по п. 1, отличающееся тем, что рычажная система выполнена в виде траверсы свободно установленной в направляющих поворотных осях с возможностью перемещения вдоль них посредством привода и
щунов, смонтированных на тех же осях и взаимодействующих с соответствующими кулачковыми дисками.
3. Устройство по п. 1, отличающееся тем, что каретка выполнена в виде полого цилиндра, охватывающего программный поворотный барабан, снабженного подпружиненным роликом, взаимодействующим с соответствующим кулачком барабана и соединенного посредством рычагов с распылителем.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 264194, М. Кл. В 44d 1/34, 1967 г.
2.В. В. Ермаков «Гидропривод металлорежущих станков «Машгиз, 1963, с. 278-279, фиг. 141.
3.С. Н. Кожевников «Механизмы, «Мащиностроение, 1965, с. 996, фиг. 14,64.
GO
Qi
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для нанесения покрытий | 1981 |
|
SU1028377A1 |
| УСТАНОВКА ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ | 2000 |
|
RU2190035C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ КОНФИГУРАЦИИ ГИБКОГО | 1973 |
|
SU399349A1 |
| Устройство для окраски внутрен-НЕй пОВЕРХНОСТи издЕлий | 1979 |
|
SU818663A1 |
| Устройство для передачи изделий | 1982 |
|
SU1093486A1 |
| Устройство для изготовления витых чувствительных элементов | 1983 |
|
SU1125084A1 |
| Установка для изготовления витых изделий их проволоки | 1972 |
|
SU440190A1 |
| Устройство для нанесения покрытия | 1987 |
|
SU1512677A1 |
| Стан для прокатки профилей переменного сечения | 1976 |
|
SU564067A1 |
| Программный позиционный датчик | 1982 |
|
SU1051607A1 |

Ю91
EO|
l
ППо
Юо
llDOl
(риг.З
