Данное изобретение относится к системам автоматического регулирования.
Известны автоматические непрерывные регуляторы, содержащие задающее устройство, усилитель регулятора, двитатель, тахогенератор на оси двигателя и датчик фактического значения регулируемого Параметра.
Управляющий сигнал на исполнительный электродвигатель в таких регуляторах пропорционален сигналу рассогласоваиия на его входе, т. е. заданная зона нечувствительности или точиОСть поддержания регулируемого параметра обеспечи вается только при данных (расчетных) и неизменных значениях момента сопротивления на валу исполнительного электродвигателя и коэффициента усиления усилителя |регулятора.
Однако момент сопротивления на валу исполнительного электродвигателя с течением времени может изменяться за счет изменения механического состояния элементов кидематической связи электродвигателя с объектом регулирования (трение, заедание и т. д.). Изменение момента сопротивления в пропорционально-иепрерывпых регуляторах приводит к изменению одного из основных показателей качества регулирования, а именно, точности поддержания заданной .регулятору уставки. Зона печувствительности изменяется также и при изменепии коэффициента усиления усилителя регулятора.
Целью данного изобретения является устранение или уменьшение зависимости зоны нечувствительности регулятора от изменения момента сопротивления на валу исполнительного электродвигателя и коэффициента усиления усилителя регулятора от их номинальных (расчетных) значений, а также уменьщение зависимости скорости иснолнительного электродвигателя прн данном сигнале рассогласования от изменения этих параметров без увеличения коэффициента усилення усилителя регулятора.
Предлол еннь Й регулятор отличается тем, что в нем последовательно с задающим устройством ко входу усилителя регулятора дополнительно подключен второй усилитель, соединенный с выходом алгебраического сумматора, который выполнен, .например, на потенциометрах, при этом первый вход сумматора связап со входом усилителя регулятора, а второй - с сигнальной обмоткой тахогенератор а.
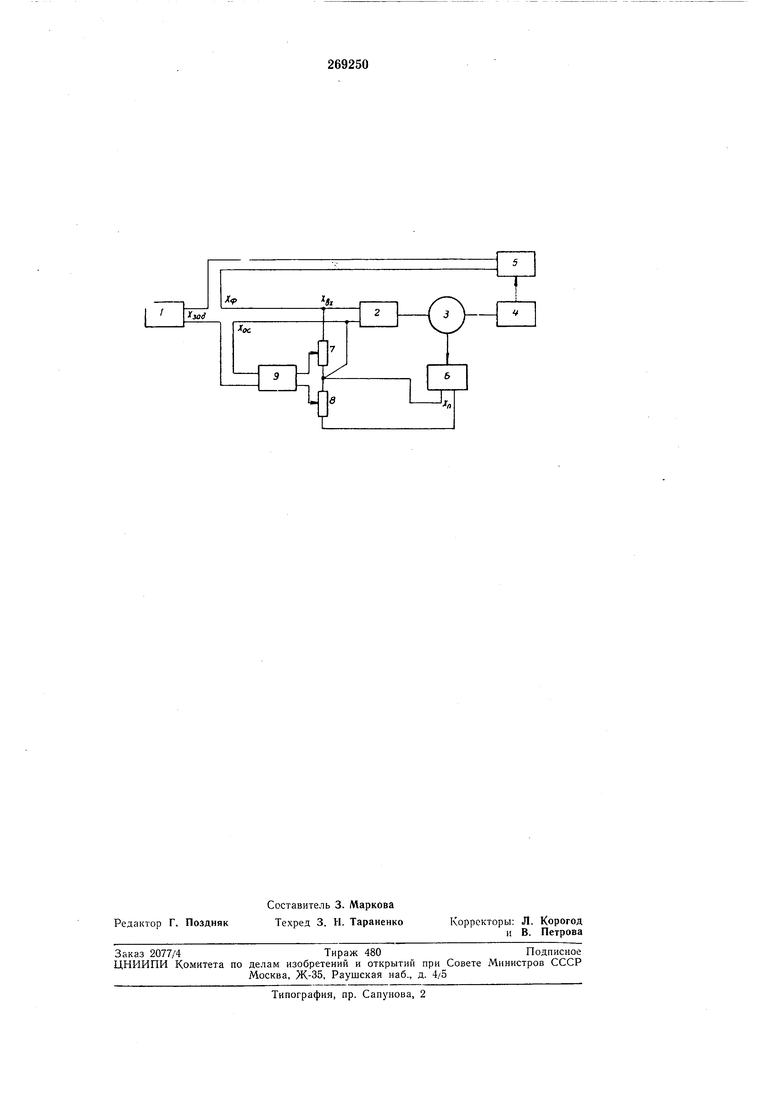
На чертеже представлена принципиальная схема регулятора, где приняты следующие обозначения:
/--задающее устройство, выдающее задание уставки регулятору Лзад;
2 - усилитель регулятора (Jgx -сигнал на его входе);
5- датчик фактического значения регулируемого параметра ф;
6- датчик скорости - тахогенератор, сигнал которого - Х„;
7и 5 - .потенциометры;
9 - дополнительный усилитель, 1выдаю1ций сигнал Хос обратной СВязи.
Сигналы, снимаемые непосредственко с входных зажимов усилителя 2нс датчика 6 скорости, сравниваются в противофазе на потенциометрах 7 и 5, и результат сра1внения подается па вход долол-нительного усилителя 9.
Разность этих сигналов устанавливают равной нулю .при номинальном (расчетном) значении момента солротивления на валу исполнительного двигателя 3 и номинальном коэффициенте усиления усилителя 2 регулятора. Выходной сигнал , с дополнительного усилителя 9 подается на .вход усилителя 2 последовательно с сигналом задатчика Лзад- При этом сигнал с датчика 6 после его прохождения через дополнительный усилитель 9, должен быть в противофазе с .сигналом рассогласования, а сигнал с входных зажимов усилителя 2 также после прохождения через дополнительный усилитель 9 должен быть в фазе с ним.
Автоматический регулятор .непрерывного типа работает следующим образом.
8статическом состоянии, когда фактическое значение регулируемого парамет ра Хф равно заданному значению зад иополиительный электродвигатель стоит неподвижно, сигналы на входе и выходе дополнительного усилителя 9 равны нулю.
При изменении уставки Азад или фактического значения регулируемого параметра ф на входе регулятора появляется сигнал рассогласования А, который поступает на вход усилителя 2 и одновременно на вход дополнительного усилителя 9. В первоначальный момент, пока исполнительный двигатель 3 еще не разввр.нулся -и сигнала, нропорционального его скорости, нет, происходит кумулятивный лроцесс нарастания сигнала на выходе допол.нительного усилителя 9, по фазе совпадающего с сигпалом рассогласова.ния, а следовательно, происходит кратковременная форсировка возбуждения усилителя, что способствует (повыщению скорости разворота двигателя. По мере разворота двигателя 3 и появления сигнала, пропорционального его скорости, от датчика 6 сигнал на выходе дополнительного усилителя 9 начинает уменьщаться. При этом, если момент сопротивления на валу исполнительного двигателя 3 и коэффициент усиления усилителя 2 регулятора равны номинальным (расчетным) значениям, то выходной сигнал на выходе дополнительного усилителя 5 уменьшится в, конечном итоге до нуля, так как сигналы на его входе будут равны по величине и противоположны но фазе.
ветствовать .сигналу рассогласования, а зона нечувствительности регулятора - своему номинальному (расчетному) значению.
При моменте сопротивления и коэффициенте усиления усилителя 2 регулятора, отличных от номинальных (расчетных) значений, сигнал от датчика 6 не будет соответствовать сигналу рассогласования, и на выходе дополнительного усилителя 9 останется корректирующий сигнал обратной связи Лос соответствующей величины и фазы для компенсации этого несоответствия, причем компенсация этого несоответствия будет иметь (Место при всех значениях сигнала рассогласования, в том
числе и нри сигнале рассогла.сования, равном номинальной (расчетной) зоне нечувствительности.
Величина сигнала а следовательно, степень компенсации несоответствия скорости
электродвигателя сигналу рассогласования и зоны нечувствительности регулятора своему номинальному Значению зависят от выбранного коэффициента передачи сигнала с входа усилителя 2, взятого непосредственно с входных его зажимов, до выхода усилителя 9.
Как показывает .математический анализ, чем ближе этот коэффициент передачи .к единице, тем выше степень компенсации, и при этом коэффициенте передачи, равном единице,
компенсация будет полной, т. е. полностью устраняется зависимость зоны нечувствительности регулятора и скорости двигателя 3 при данном сигнале рассогласовапия от изменения момента сопротивления на валу исполнительного двигателя 3 и коэффициента усиления усилителя 2 регулятора.
При этом, однако, степень д омпенсации зависит от зоны нечувствительности дополнительного усилителя 9 и длины линейного участка его выходной характеристики. Кроме того, для получения наибольщего эффекта быстродействия необходимо ионользовать дополнительный усилитель с малой постоянной времени. Все это надо учесть при выборе усилителя 9.
Предмет изобретения
Автоматический непрерывный регулятор, содержащий задающее устройство, усилитель регулятора, двигатель, тахогенератор .на оси двигателя и датчик фактического значения регулируемого параметра, отличающийся тем, что, с целью .увеличения точности и повышения быстродействия регулятора, в нем последовательно с задающим устройством ко входу усилителя регулятора дополнительно подключен второй усилитель, соединенный с выходом алгебраического сумматора, который выполнен, например, на потенциометрах, при этом первый 1ВХОД сумматора связан со входом усилителя регулятора, а второй - с сигнальной обмоткой тахогенератора.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИ ГИДРОТУРБИНЫ | 1969 |
|
SU258164A1 |
| Регулятор давления для насосной станции магистрального трубопровода | 1985 |
|
SU1256002A2 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| Регулятор мощности дуговой электропечи | 1978 |
|
SU678733A1 |
| Регулятор давления жидкости для насосной станции | 1974 |
|
SU526863A1 |
| Регулятор мощности дуговой электро-пЕчи | 1979 |
|
SU797086A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| Устройство для стабилизации развеса и регулирования номера холста | 1980 |
|
SU929754A2 |