Данное устройство может быть нсиользовано в различных отрасля.х техники, приуменяющих нелинейные системы авто.матического управления.
Известны устройства для формирования и ввода нелинейных корректирующих сигналов, содержащие усилитель, два детектора и два модулятора.
Однако известные устройства имеют сложную электрическую схему и требуют дополнительных источников питания. Кроме того, их применение может вызвать дополнительные ошибки в следящей системе, а в ряде случаев - и автоколебания при реальной асимметрии характеристик элементов, составляющих устройство.
Предлагаемое устройство отличается от известных тем, что в нем две параллельно соединенные цепочки из последовательно связанных детектора и модулятора подключены к выходу демодулятора следящей системы, причем входы опорного напряжения модуляторов подсоединены к выходу усилителя, вход которого подключен ко входу следящей системы.
Это позволяет компенсировать ,инерционность звеньев следящей системы для повыщения ее точности.
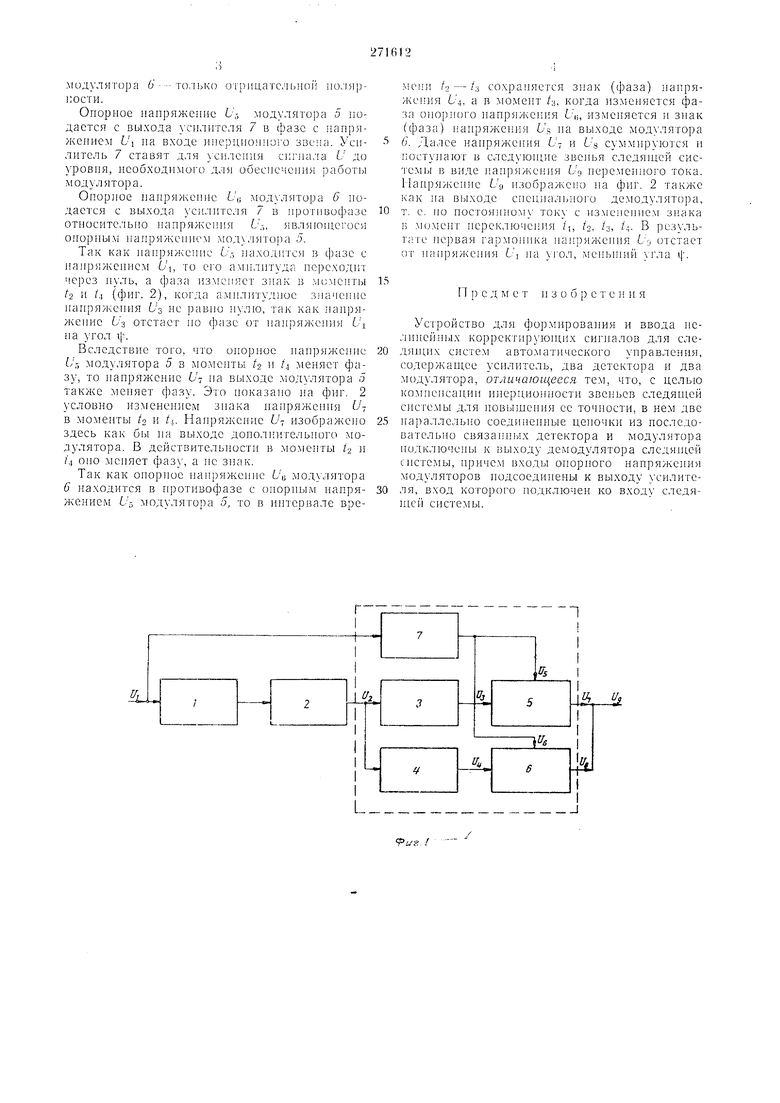
Выход инерционного зве}1а / иодк.чючси ко входу демодулятора (фазочувствительного выпрямителя) 2. Выход демодулятора подключен к двум параллельно включенным детекторам 3 и 4. Детекторы подключены так, что пропускают ток в противоноложных паиравле1 иях. К выходу каждого детектора подключен свой модулятор 5 или 6. Опорное напряжение на модуляторы подается с выхода усилителя 7, приче.м модулятор 6 запитывается в иротивофазе относительно модулятора 5.
Работает устройство следуюп1им образом.
Предположим, что папряжение па входе Lj и выходе инерционного звена модулировано по амплитуде напряжением переменного тока. Напряжение с вы.хода инерционного звена демод лируется демод лятором 2 (фиг. 1). Если сигнал на выходе инерционного звена является сигналом постоянгюго тока, то демодулятор не ставят.
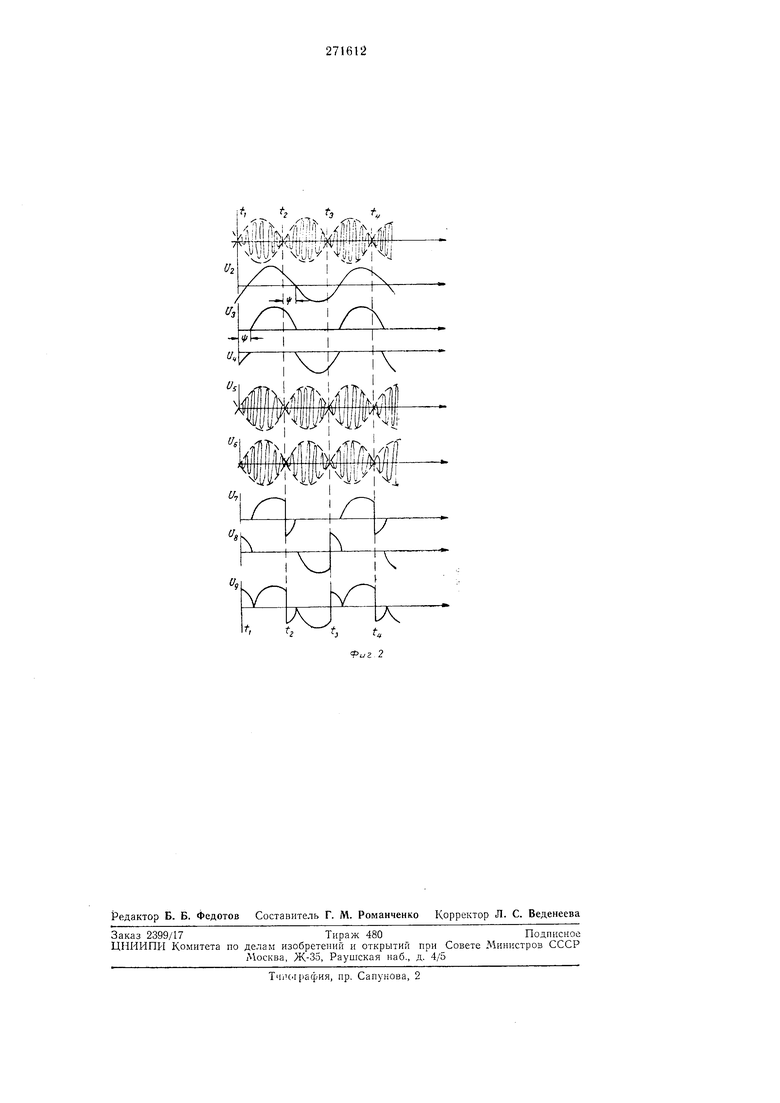
Напряженне i-j на выходе демодулятора (фнг. 2) сдвинуто но фазе относительно огибающей напряження Ll на угол i)-. определяемый инерционюстью звена / (фиг. 1) и частотой автоколебаний системы. Па выходе детекторов 3 п 4 кривые напряжений Ls и U имеют вид, показанный на фиг. 2. Па вход модулятора 5 поступают еигналы постоянного тока только положительной полярности, а на вход
.модулято а 6---только отрицательно по.тяр пости.
Опорное напряжение L,-, модулятора 5 подастея с выхода хснлителя 7 в (|ja3e с напряжением Ll на входе инерционного звена. Усилитель 7 ставят для усиления сигнала U до )ровня, необходимого для обеснечення работы модулятора.
Опорное напряжение 6« модулятора 6 нодается с выхода усил1ггеля 7 в нротивофазе отноеительно напряже1П1я L,-,, явля1О1цегося опорным напряжением модх.чятора 5.
Так как наи)яжение L,-, находится в фазе е напряжеиием 6i, то eio амплитуда переход1гг через пуль, а фаза изменяет знак в моменты /2 н /4 (фиг. 2), когда амилитудное значе 1ие панряження Ls не )авио пулю, так как пап эяжеиие Ьз отстает но фазе от иапряжепня U на угол
Вследствие того, что опорное папряжение U-, модулятора 5 в моменты /г и ft меняет фазу, то напряжение U на выходе модулятора 5 также меняет фазу. Это показано па фпг. 2 условно изменением знака напряжения U-; в моменты /2 и /1. Нанряжеппе L-; изображено здесь как бы на выходе донолпптельпого модулятора. В действительпости в моменты /2 н /4 оно меняет фазу, а не знак.
Так как онорное иан1)яженне L,; модулятора 6 находится Б нротивофазе с (люриым папряжением t-r, модулятора 5, то в интервале времени /2 - /:s сохраняется знак (фаза) напряжепня L4, а в момент /з, когда нзмепяется фаза опорного напряжения U,;, изменяется и знак (фаза) 1 апряже11ия Ls иа выходе модулятора 6. Далее напряжения L- и Ls суммируются н ностунают в следуюни1е звенья следян ей системы в виде панряже)11я Ly пе 5едтепного тока. Напряжение Lg изобра/1 ено на фиг. 2 также как на выходе снецнального демодулятора, т. е. но постоянному току с изменеинем знака Б момент нереключения /i, /2, /3, 4- В резульгггге не)вая гармон1п а на.чря/кення L;, отстает от напряжения Ll на угол, меььпшй ij.
П р е д м е т и з о б р е т е н и я
Уетройетво для формирования и ввода нелннейных корректнруюии1х еигиалов для следян гх систем автоматического управления, содержап1ее усилитель, два детектора и два модулятора, отличающееся тем. что, с целью компеисаппи иперционности следящей системы для новышеиия ее точности, в нем две нараллельно соединенные ценочкц из цоследователь {о связанных детектора и модулятора иодключены к выходу демодулятора еледяи1ей системы, прнче.м входы опорного нанряжения модуляторов нодсоединепы к выходу усилителя, вход которого подключен ко входу следящей системы.
йр®м|||4|
чЧиУ- Ф) iNi
v7f
Vy 
| название | год | авторы | номер документа |
|---|---|---|---|
| У\БТОр | 1973 |
|
SU363069A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ СИНХРОННОГОГЕНЕРАТОРА | 1969 |
|
SU238901A1 |
| Следящая система | 1977 |
|
SU631863A1 |
| Корректирующее устройство | 1975 |
|
SU537326A1 |
| Следящая система | 1976 |
|
SU660018A1 |
| Калибратор фазового сдвига | 1974 |
|
SU515071A1 |
| СЛЕДЯЩИЙ ЦИФРОВОЙ ВОЛЬТМЕТР | 1968 |
|
SU213181A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1971 |
|
SU298922A1 |