il
Изобретение относится к области вычислительной техники.
Известны устройства для . моделирования движения плоских механизмов с использованием аналоговой вычислительной машины, содержащие генератор управляющих и развертывающих сигналов, индикатор и блоки формирователей координат ограничителей, перемножения и суммирования сигналов развертывания и текущих координат точек подвижного звена и ограничителей, поступающих, например, с соответствующих выходов аналоговой вычислительной машины. Известные устройства требуют для наглядного моделирования Использования дополнительного оборудования.
В предложенном устройстве указанный недостаток исключен.
Устройство отличается от известных тем, что в нем один из входов индикатора соединен через сумматор с выходами блока перелмножения, блока формирователей координат ограничителей и источника сигнала, пропорционального координате поступательного движения; второй вход Индикатора соединен с выходом развертывающего сигнала генератора, причем этот же выход подключен к одному из входов блока перемножения, второй вход которого подключен к источнику сигнала, пропорционального координате вращательного
движения, и к одному из входо-в блока формирователей, другие входы которого соединены с выходами управляющих сигналов генератора, выходами источников сигналов, пропорциональных координатам ограничителей, и через сумматор - с выходами блока перемножения И источника сигнала, пропорционального координате поступательного движения.
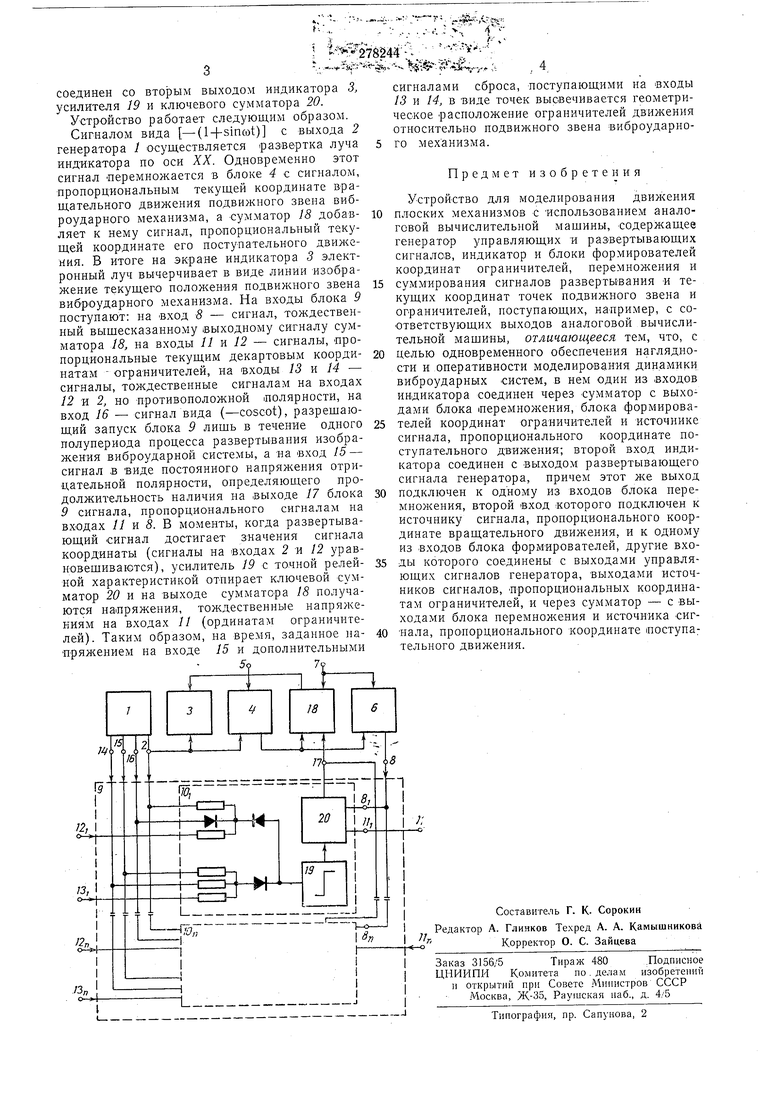
На чертеже приведена схема устройства.
Устройство состоит из генератора 1 с развертывающим выходом 2, -соединенного с входами индикатора 3 и блока 4 перемножения; второй вход 5 блока 4 соединен с источником сигнала, пропорционального координате вращательного движения подвил ного звена механизма, а выход через сумматор 6, вход 7 которого соединен с источником сигнала, пропорционального координате поступательного движения, подключен ко входу 8 (для сигнала откомпенсации, пропорционального текущему значению ординаты точки подвижного звена) блока 9, выполненного, например, в виде набора формирователей 10 декартовых координат ограничителей, входы //, 12 и 13 которого соединены с источниками сигналов, пропорциональных координатам ограничителей, а входы 14, 15 и 16 - с управляющими выходами генератора / сигналов запуска и сброса; выход 17 блока 9 через сумматор /
..,.-ч. ..... ;,
соединен со BTOJDHM выходом индикатора 5, усилителя /9 и ключевого сумматора 20.
Устройство работает следующим образом.
Сигналом вида -(l+sincot) с выхода 2 генератора 1 осуществляется развертка луча индикатора по оси XX. Одновременно этот сигнал перемножается в блоке 4 с сигналом, пропорциональным текущей координате вращательного движения подвижного звена виброударного механизма, а -сумматор 18 добавляет к нему сигнал, про-пордиональный текущей координате его поступательного двилсеиия. В итоге на экране индикатора 3 электронный луч вычерчивает в виде линии изображение текущего положения подвижного звена виброударного механизма. На входы блока 9 поступают: на вход 8 - сигнал, толсдественный выщесказанному 1выходному сигналу сумматора 18, на входы 11 у. 12 - сигналы, пропорциональные текущим декартовым координатам ограничителей, на входы 13 к 14 - сигналы, тождественные сигналам на входах 12 и 2, но противоположной лолярности, на вход 16 - сигнал вида (-coscot), разрещающий запуск блока 9 лишь в течение одного полунериода процесса развертывания изображения виброударной системы, а на вход 15 - сигнал .в виде постоянного напряжения отрицательной полярности, определяющего продолжительность наличия на выходе 17 блока 9 сигнала, пропорционального сигналам на входах // и 8. В моменты, когда развертывающий сигнал достигает значения сигнала координаты (сигналы на входах 2 и 12 уравновещиваются), усилитель 19 с точной релейной характеристикой отпирает ключевой сумматор 20 и на выходе сумматора 18 получаются напряжения, тождественные напрял ениям на входах 11 (ординатам ограничителей). Таким образом, на время, заданное напряжением на входе 15 и дополнительными
5р79
,,.,K278244
-Tt-:-
сигналами сброса, поступающими на входы 13 и 14, в виде точек высвечивается геометрическое расположение ограничителей движения относительно подвижного звена виброударного механизма.
Предмет изобретения
Устройство для моделирования движения
плоских механизмов с использованием аналоговой вычислительной мащины, содержащее генератор управляющих и развертывающих сигналов, индикатор и блоки формирователей координат ограничителей, перемножения и
суммирования сигналов развертывания и текущих координат точек подвижного звена и ограничителей, поступающих, например, с соответствующих выходов аналоговой вычислительной мащины, отличающееся тем, что, с
целью одновременного обеспечения наглядности и оперативности моделирования динамики виброударных систем, в нем один из входов индикатора соединен через сумматор с выходами блока перемнол ения, блока формирователей координат ограничителей и источнике сигнала, пропорционального координате поступательного двил ения; второй вход индикатора соединен с выходом развертывающего сигнала генератора, нричем этот лее выход
подключен к одному из входов блока перемнолсения, второй вход которого подключен к источнику сигнала, пропорционального координате вращательного движения, и к одному из входов блока формирователей, другие входы которого соединены с выходами управляющих сигналов генератора, выходами источников сигналов, пропорциональных координатам ограничителей, и через сумматор - с выходами блока перемнолеения и источника сигнала, пропорционального координате ооступа; тельного движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ВВОДА ИНФОРМАЦИИ | 1970 |
|
SU278243A1 |
| Устройство для моделирования ударных систем | 1973 |
|
SU451102A1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВОДЛЯ ВИЗУАЛЬНОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЙ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1972 |
|
SU427342A1 |
| Многофункциональное устройство для вибрационных испытаний конструкций | 1983 |
|
SU1133490A1 |
| УСТРОЙСТВО для РЕГИСТРАЦИИ И НАБЛЮДЕНИЯ | 1966 |
|
SU185572A1 |
| Устройство для моделирования упруговязкой фрикционной пары | 1990 |
|
SU1780091A1 |
| Индикаторное устройство для визуального контроля перемещений движущихся объектов | 1972 |
|
SU444200A1 |
| Тренажер оператора | 1984 |
|
SU1174960A2 |
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
| УСТРОЙСТВО для РЕШЕНИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ В ЧАСТНЫХ ПРОИЗВОДНЫХ | 1969 |
|
SU247635A1 |
