Изобретение относится к области автоматизации подъемно-транснортных машин.
В известных системах управления поворотом экскаватора-драглайна ковш колеблется. Амплитуда колебаний ковша зависит от темпа нарастания и падения тока генератора, косого отрыва и закона изменения высоты подвеса ковша, как условного маятника. Колебания ковша вызывают дополнительные нагрузки в механизме поворота и стреле экскаватора и затрудняют установку ковша в заданный сектор забоя.
Предлагаемая система отличается тем, что в ней дополнительно установлены датчик угла отклонения ковша экскаватора, соединенный с блоком вычисления относительной скорости отклонения ковша, модель «привод поворота - ковш, связанную с датчиком напряжения, включенным в п;епь якоря двигателя регулятора скорости, нуль-орган, соединенный с выходом модели и выходом датчика отклонения ковша, а также ключ, входы которого связаны с выходом нуль-органа и с выходом блока вычисления, а его выход - со входом регулятора скорости.
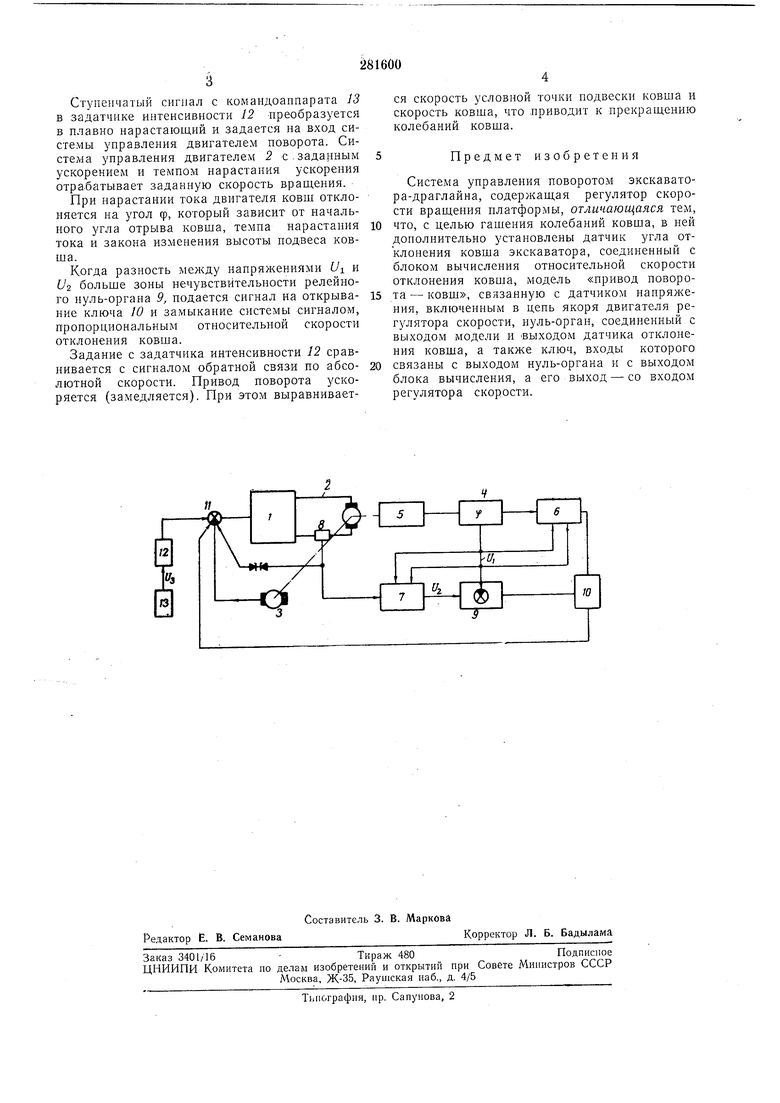
Система управления поворотом экскаватора-драглайна включает в себя регулятор 1 скорости враш,ения платформы с двигателем 2 и тахогенератором 3 в обратной связи. Регулятор 1 управляет приводным двигателем 2. Угол отклонения ковша фиксируется датчиком 4, который установлен, например, на голове стрелы и фиксирует угол поворота люльки головного блока 5. Напрял ение /7, пропорциональное углу отклонения ковша, подается в блок 6 вычисления относительной угловой скорости ковша и на сравнение с идеальным углом отклонения ковша, вычисляемым на модели 7. С другой стороны, на модель (вычисляющую установившийся угол отклонения ковша) подается сигнал, пропорциональный току двигателя привода поворота с датчиком 5, и сигналы длины и радиуса подъема ковша.
Напряжение Ui и U с датчика 4 с выхода модели 7 сравниваются на релейном нуль-органе 9, управляюш,им ключом 10. Ключ подключает сигнал относительной скорости отклонения ковша, на вход узла сравнения 11 в качестве обратной связи. На узел сравнения // задается сигнал обратной связи по скорости, например, с тахогенератора и сигнал с задатчика интенсивности 12, преобразующего Ступенчатый сигнал с командоаппарата /5 в задатчнке интенсивности 12 преобразуется в плавно нарастающий и задается на вход системы управления двигателем поворота. Система управления двигателем 2 с-заданным ускорением и темпом нарастания ускорения отрабатывает заданную скорость вращения. При нарастании тока двигателя ковш отклоняется на угол ф, который зависит от начального угла отрыва ковша, темпа нарастания тока и закона изменения высоты подвеса ковша. Когда разность между напряжениями U и U2 больше зоны нечувствительности релейного нуль-органа 9, подается сигнал на открывание ключа 10 и замыкание системы сигналом, пропорциональным относительной скорости отклонения ковша. Задание с задатчика интенсивности 12 сравнивается с сигналом обратной связи по абсолютной скорости. Привод поворота ускоряется (замедляется). При этом выравнивается скорость условной точки подвески ковша и скорость ковша, что приводит к прекращению колебаний ковша. Предмет изобретения Система управления поворотом экскаватора-драглайна, содержащая регулятор скорости вращения платформы, отличающаяся тем, что, с целью гашения колебаний ковша, в ней дополнительно установлены датчик угла отклонения ковша экскаватора, соединенный с блоком вычисления относительной скорости отклонения ковша, модель «привод поворота - ковш, связанную с датчиком напряжения, включенным в цепь якоря двигателя регулятора скорости, нуль-орган, соединенный с выходом модели и выходом датчика отклонения ковша, а также ключ, входы которого связаны с выходом нуль-органа и с выходом блока вычисления, а его выход - со входом регулятора скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления механизмом поворота экскаватора-драйглайна | 1977 |
|
SU653347A1 |
| Устройство для измерения углового отклонения ковша экскаватора от вертикальной плоскости | 1983 |
|
SU1121357A1 |
| Устройство для управления механизмом поворота экскаватора | 1989 |
|
SU1744209A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| Способ управления процессом черпания экскаватора-драглайна и устройство для его осуществления | 1980 |
|
SU910957A1 |
| Устройство для управления процессом выбора зазоров механических передач в двухдвигательном электроприводе поворота экскаватора | 1983 |
|
SU1129301A1 |
| Устройство для управления механизмом поворота драглайна | 1986 |
|
SU1384682A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Устройство для управления электроприводом поворота экскаватора-драглайна | 1981 |
|
SU972009A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
