00
00 4i О5
Фигл
Ичобрете.ние относится к управлению экскаваторами и может применяться па мощньгх драглайнах.
Цель изобретения - повышение на- дс .жиости за счет повьшения эффективности гашения колебаний ковша.
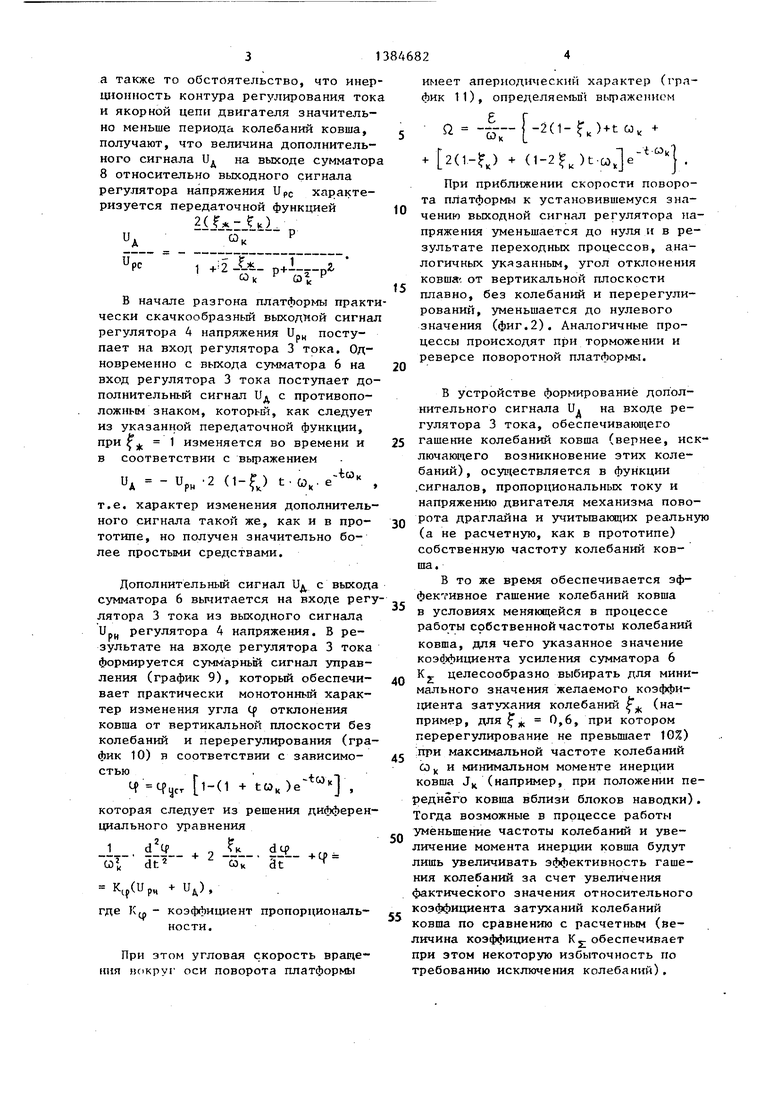
На фиг. 1 изображена схема устройства; на фиг. .2 - графики изменения во времени при разгоне поворотной платформы драглайна суммарного сиг- пала на входе регулятора тока 3 (график 9), угла tp отклонения ковша от вертикальной плоскости (график 10 и угловой скорости Я. вокруг оси поворотной платформы (график 11).
Устройство для управления механизмом поворота драглайна содержит :питающий двигатель 1 механизма поворота, преобразователь 2 (например, Т1ФИСТОРНЫЙ преобразователь или генератор) с подключенным к его входу регулятором 3 тока, включенные на входе регулятора 3 тока, регулятор 4 напряжения, датчик 5 тока и сумматор 6, подключенный к входу регулятора 4 напряжения, датчик 7 напряжения двигателя, пропорционально-интеграль нре звено 8, вход которого соединен с выходом датчика 5 тока, а выход подключен к первому входу сумматора 6. Второй вход последнего соединен с выходом датчика 7 напряжения.
Устройство работает следующим образом.
Переменная вр.емени Т„ пропорционально-интегрального звена 8, передаточная функция которого определяется выражением
у к
«пи(р1 . р Тпи
выбирается равной времени разгона поворотной платформы до максимальной скорости Q „дне с заданнь м сред- ним ускорением 6 т.е.
гр гт, МОКС
J- пи J р1
Коэффициент усиления по про- порциональной составляющей, обеспечивающей компенсацию падения напряжния на сопротивлении якорной цепи двигателя, выбирается равным
К
пи ЯА
АИ
К
AT
гдо R,.. - сопротивление якорной цепи двигателя 1,
Кдц и Кд - передаточные коэффи- . циенты датчиков напряжения 7 и тока 5.
Сигнал с выхода датчика 5 тока, пропорциональный величине тока 1 якорной цепи двигателя 1, через пропорционально-интегральное звено 8 поступает на первый вход сумматора 6, на второй вход которого с противоположным знаком поступает выходной сигнал .датчика 7 напряжения,, При этом на выходе сумматора 6 формируется дополнительньй сигнал воздействия на вход регулятора тока 3, определяемый зависимостью
,(К„«-.-1-- ) R.A i).
где БД - электродвижущая сила двигателя 1;
К - коэффициент усиления сумматора 6 по обоим входам, который для обеспечения гашения колебаний ковша с желаемьм значением относительного коэффициента затухания выбирается из вьфажения (для полного исключения колебаний ковша значение коэффициента следует принять рав- ньм единице)
V . 2 --.- (.) Тр.со, ,
где In и I( - моменты инерции поворотной платформы и ковша; Оц - собственная частота
колебаний ковша; к относительный коэффициент затухания колебаний ковша, который обычно не превьшает величины 0,05.
Учитьшая, что зависимость ЭДС двигателя от токо-якорной цепи характеризуется передаточной функцией
А АИ
-я
К
кг
р.. UK Wf
2 Г.
Р
1
а также то обстоятельство, что инерционность контура регулирования тока и якорной цепи двигателя значительно меньше периода колебаний ковша, получают, что величина дополнительного сигнала ид на выходе сумматора 8 относительно выходного сигнала регулятора напряжения Upc характеризуется передаточной функцией 2().
и,
о
рс
В начале разгона платформы практчески скачкообразный выходкой сигна регулятора 4 напряжения Up поступает на вход регулятора 3 тока. Одновременно с выхода сумматора 6 на вход регулятора 3 тока поступает до полнительньй сигнал ид с противоположным знаком, который, как следует из указанной передаточной функции, при j 1 изменяется во времени и в соответствии с выражением
ид -Up, 2 (1-) t.co.
т.е. характер изменения дополнительного сигнала такой же, как и в про- тотипе, но получен значительно более простыми средствами.
Дополнительный сигнал U с выхода сумматора 6 вычитается на входе регу лятора 3 тока из выходного сигнала Up регулятора 4 напряжения. В результате на входе регулятора 3 тока формируется суммарньй сигнал управления (график 9), который обеспечи- вает практически монотонный характер изменения угла ср отклонения ковша от вертикальной плоскости без колебаний и перерегулирования (график 10) н соответствии с зависимо- стью
Чycт l-(1 + tO,) ,
которая следует из решения дифференциального уравнения
}г.
S I
at
1, d 2 У- -bU. CO , -
(Up« - ид),
где К„, - коэффициент пропорциональ- кости.
При этом угловая скорость вращения вокруг оси поворота платформы
с
5
0 5
О
0 5
0
имеет апериодический характер (график 11), определяемьпЧ выражением
2(1-Г,) (1-2,)t.a),.
При приближении скорости поворота платформы к установившемуся значению выходной сигнал регулятора напряжения уменьшается до нуля и в результате переходных процессов, аналогичных указанным, угол отклонения ковша-, от вертикальной плоскости плавно, без колебаний и перерегулирований, уменьшается до нулевого значения (фиг.2). Аналогичные процессы происходят при торможении и реверсе поворотной платформы.
В устройстве формирование дополнительного сигнала и. на входе регулятора 3 тока, обеспечивающего гашение колебаний ковша (вернее, иск- лючагачего возникновение этих колебаний) , осуп1ествляется в функции .сигналов, пропорциональных току и напряжению двигателя механизма поворота драглайна и учитывающих реальную (а не расчетную, как в прототипе) собственную частоту колебаний ковша.
В то же время обеспечивается эффективное гашение колебаний ковша в условиях меняющейся в процессе работы собственной частоты колебаний ковша, для чего указанное значение коэффициента усиления сумматора 6 К- целесообразно выбирать для минимального значения желаемого коэффициента затухания колебаний (например, для j 0,6, при котором перерегулирование не превьш1ает 10%) ;при максимальной частоте колебаний со и минимальном моменте инерции ковша J (например, при положении переднего ковша вблизи блоков наводки). Тогда возможные в процессе работы уменьшение частоты колебаний и увеличение момента инерции ковша будут лишь увеличивать эффективность гашения колебаний за счет увеличения фактического значения относительного коэффициента затуханий колебаний ковша по сравнению с расчетным (величина коэффициента Kj- обеспечивает при этом некоторую избыточность по требованию исключения колебаний).
Таким образом, изобретение обеспечивает упрощение схемы устройства для управления механизмом поворота драглайна и его нападки йри одновременном обеспечении эффективного гашения колебаний ковша.
Формулаизобретения
Устройство для управления механизмом поворота драглайна содержащее регулятор тока, подключенный к входу преобразователя двигателя поворота, регулятор напряжения, сумматор, датчик тока, соединенные соответствен
но с тремя входами регулятора тока, отличающееся тем, что, с целью повышения надежности за счет повьпления эффективности гашения колебаний ковша, оно дополнительно снабжено датчиком напряжения двигателя и пропорционально-интегральным звеном, причем выход датчика тока соединен с входом пропорционально- интегрального звена, выход которого подключен к первому входу сумматора, при этом выход датчика напряжения двигателя соединен с вторыми входами сумматора и регулятора напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с упругой механической связью | 1984 |
|
SU1275723A1 |
| Устройство для управления механизмом поворота экскаватора | 1989 |
|
SU1744209A1 |
| Электропривод с упругой механической связью | 1986 |
|
SU1436254A1 |
| Устройство для измерения углового отклонения ковша экскаватора от вертикальной плоскости | 1983 |
|
SU1121357A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| Способ измерения количества работы выполненной экскаватором-драглайном | 1982 |
|
SU1097765A1 |
| Система управления механизмом поворота экскаватора-драйглайна | 1977 |
|
SU653347A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ЭКСКАВАТОРА-ДРА ГЛАЙ НА | 1970 |
|
SU281600A1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
Изобретение относится к управлению экскаваторами. Цель изобретения - повьшение надежности за счет повышения эффективности гашения колебаний ковша. Устройство содержит регулятор 3 тока,, подключенньш к входу преобразователя 2 двигателя поворота, регулятор 4 напряжения. сумматор 6, датчик 5 тока, соединенные соответственно с тремя входами регулятора 3. Устройство имеет дополнительно датчик- 7 напряжения двигателя и пропорционально-интегральное звено 8. В начале разгона платформы скачкообразный сигнал регулятора 4 поступает на регулятор 3 и одновременно с выхода сумматора 6 на вход регулятора 3 поступает дополнительный сигнал, который изменяется во времени. Дополнительный сигнал из сумматоров вычитается на входе регулятора 3 из выходного сигнала регулятора 4. В результате этого на входе регулятора 3 формируется cyMNiapHbtfi сигнал управления, кото- рьй обеспечивает практически монотонный характер изменения угла отклонения ковша от вертикальной плоскости без колебаний и перерегулирования. 2 шт. i (Л
Фиг. 2
/
11
| Устройство для управления поворотом одноковшового экскаватора | 1977 |
|
SU682615A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления механизмом поворота драглайна | 1984 |
|
SU1209783A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
