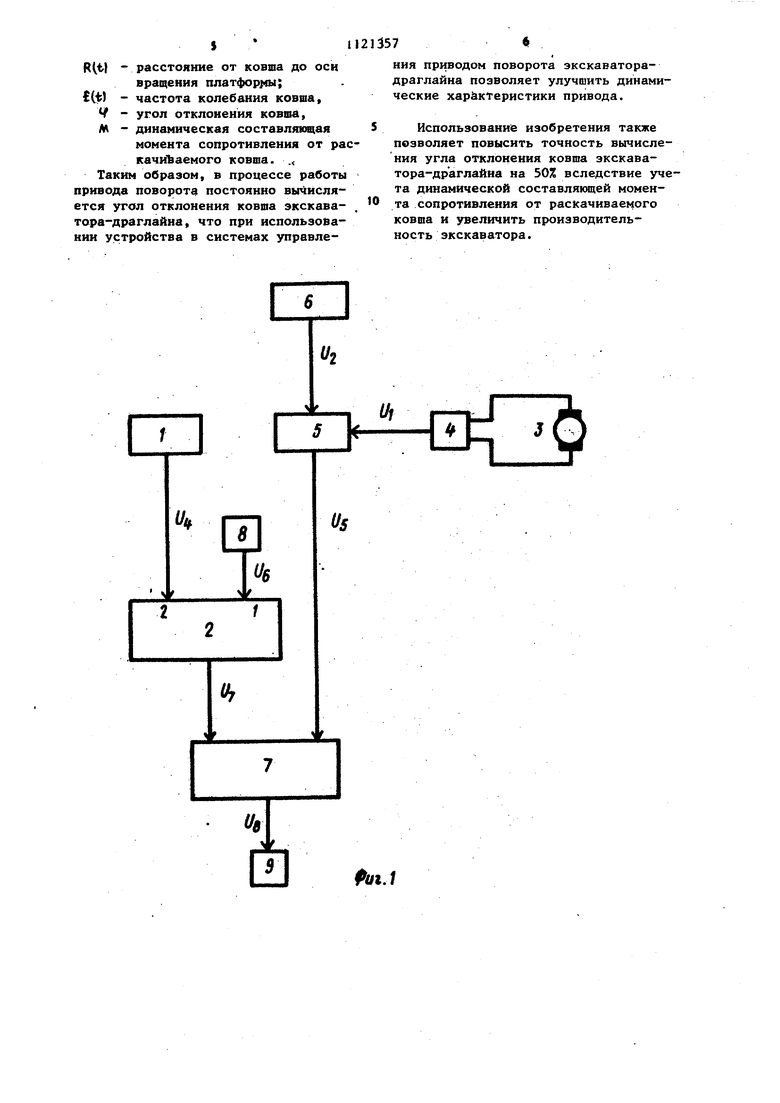
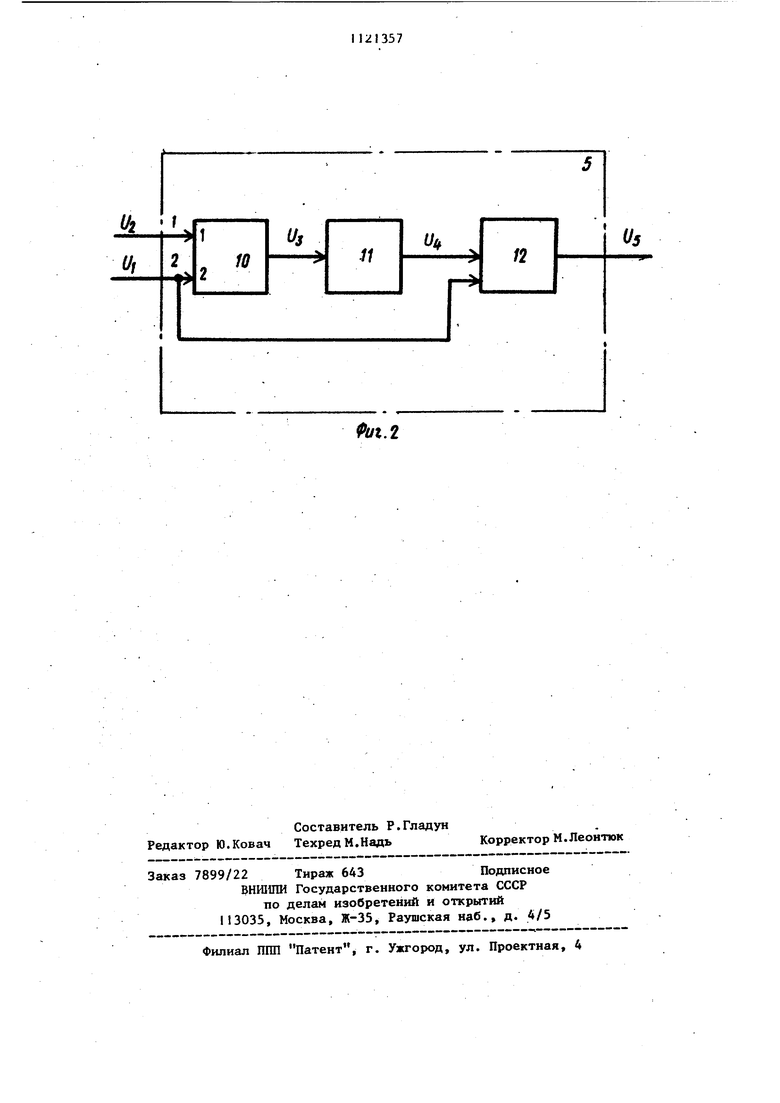
f Изобретение относится к автоматиэации горнодобывающей проьадшленнос,ти и может быть использовано в систе мах управления экскаватором. Известно устройство для определения положения ковша экскаваторадраглайна относительно стрелы, включающее рычаг, одним своим концом сочлененный с-подъемным канатом, а другим связанный с измерителями угяовых отклонений СОК недостаткам следует отнести низ кую точность, обусловленную механическими измерителями, наличием люфтов и зоны нечувствительности головных блоков. Известно устройство для измерения углового отклонения ковша экскаватора от вертикальной плоскости, содержащее датчик тока якорной цепи двигателя поворота платформы, датчик скорости, блок вычисления параметров движения ковша и блок деления, выход которого связан с измерительным прибором 23. Недостатком данного устройства является низкая точность, обусловлен ная тем, что косвенный параметр, по которому определяют угол отклонения ковша экскаватора-драглайна, а именно динамический момент сопротивления, создаваемый отклоненным ковшом вычисляется как разность момента дви гателя, которому пропорционален ток якоря дви рателя, и динамического момента, пропорционального ускорению платформы принятого с целью упро, цения постояиной величиной. После достижения установившегося движения момент двигателя поворота равен статическому моменту сопротивления, однако динамический момент сопротивления, создаваем отклонением ковша, определяется также, как и на участке разгона. Цель изобретения - повышение точ ности измерения угла отклонения ков ша путем точного учета динамической составляющей момента сопротивления от раскачиваемого ковша. Указанная цель достигается тем, что устройство для измерения углово го отклонения ковша экскаватора от вертикальной плоскости, содержащее датчик тока якорной цепи двигателя поворота платформы, датчик скорости блок вычисления параметров движения ковша и блок деления, выход которого связан с измерительньм прибо 572 ром, снабжено датчиком массы ковша, блоком умножения и блоком определения оценки динамического момента сопротивления от раскачиваемого ковша, входы которого соединены с выходами датчиков тока якорной цепи , двигателя поворота платформы и скорости, а выход соединен с одним из входов блока деления, к второму входу которого подключен выход блока умножения, входы которого соединены с выходами датчика массы ковша и блокад вычисления параметров движения ковша. При этом блок определения оценки динамического момента сопротивления от раскачиваемого ковша выполнен в виде последовательно соединенных первого сумматора, инерционного звена и второго сумматора, другой вход которого соединен с одним из входов первого сумматора непосредственно, причем оба входа первого сумматора являются входами блока определения оценки динамического момента сопротивления от раскачиваемого ковша, а его выходом является выход второго сумматора. На фиг.I изображена функциональная схема устройства для измерения углового отклонения ковша экскаватора от вертикальной плоскости; на фиг.2 - функциональная схема блока определения оценки динамического момента сопротивления от раскачиваемого ковша. Устройство для измерения углового отклонения ковша экскаватора от вертикальной плоскости включает датчик I массы ковша, выход которого подключен к одному из выходов блока 2 умножения, тахогенератор 3 через датчик 4 скорости подключен к одному из выходов блока 5 определения оцеики динамического момента сопротивления от раскачиваемого ковша, к второму входу которого подключен датчик 6 тока якорной цепи двигателя поворота платформы, а выход блока 5 соединен с одним из входов блока 7 деления, другой вход которого соединен с выходом блока 2, второй вход которого соединен с выходом блока 8 вычисления параметров движения ковша, выход блока 7 деления соединен с входом вторичного прибора 9.Блок 5 определения оценки динамического момента сопротивления 31121 (фиг.2 I включает в себя сумматор 10, выход которого через инерционное звено 11 соединен с первым входом второго сумматора 12, второй вход ко-торого соединен с вторым входом сум- 5 матора 10, два входа которого являются соответстственно первым и вторым входом блока 5. Устройство для измерения углового отклонения ковша экскаватора от 10 вертикальной плоскости работает следующим образом. В процессе перемещения стрелы отклонение ковша создает динамическую .составляющую момента сопротив- 15 ления, воздействующую через стрелу экскаватора на поворотную платформу и тем самым на вал поворотного двигателя, вызывая появление сигналов соответственно на входе датчика 4 скорое-2о ти и датчика 6 тока. Появившиеся сигналы и и Uj поступают на вход сумматора 10 (фиг.2) где преобразуется согласно соотношению . -коэффициент передачи первого каналасумматора lOi 30 коэффициент передачи второго канала сумматора 10, k,К - соответственно коэффициент передачи датчика 4 скорости и тока; w. соответственно масштабы по моменту, скорости и току двигателя поворота; Jp - момент инерции двигателя и поворотной платформы Ф - поток возбуждения двигателя поворота, Сд - магнитная постоянная двигателя поворота. С выхода сумматора 10 напряжение .поступает на вход инерционного звена и и преобразуется в виде и : - Тр-и 3 где U4 - выходное напряжение инер- 55 ционного звена 11J постоянная времени инерционного звена П; зв 12 но вы на гд ет на си пр си вых ет гд ум по гд и и гд электромагпитпая постоянная времени якорной цепи двигателя-поворота. Выходной сигнал U инерционного на I1 поступает на вход сумматора выходное значение сигнала рав У - Лкоэффициент передачи первого канала сумматора 12, коэффициент передачи второго канала сумматора 12. Таким образом, на выходе блока 5 одное напряжение Uj пропорциоьно функциональной зависимости ) М - оценка динамического момента сопротивления от раска- . чиваемого ковша; I J - соответственно скорость вращения и тока двигателя поворота. С выхода блока 5 сигнал поступана первый вход блока 7 деления, второй вход которого поступает нал с выхода блока 2 умножения. Выходной сигнал U блока 2 равен изведению поступающих на вход налов и и U При подъеме ковша и повороте на оде датчика 1.массы ковша появляя сигнал U4 равный П1 ( - масса ковша; К - коэффициент передачи датчика массы ковша. С выхода блока 8 на вход блока 2 ожения поступает сигнал Ug проциональный:U.KgR2((t|-, Кд коэффициент передачи блока 8; R(t| - расстояние от ковща до оси вращения платформы; ( - частота колебания ковша;kg - коэффициент передачи блока 8. Выходной сигнал блока 7 деления равен частному от деления U и и пропорцирнален зависимости 44 «.) т,(- масса ковша.
R(t) - расстояние от ковша до оси
вращения платфор ш; €(tJ - частота колебания ковша, Ч - угол отклонения ковша, М - динамическая составляющая
момента сопротивления от ракачиЪаемого ковша. . Таким образом, в процессе работы привода поворота постоянно вычисляется угол отклонения ковша экскаватора-драглайна, что при использовании устройства в системах управлеНИН приводом поворота экскаваторадраглайна позволяет улучшить динамические характеристики привода.
Использование изобретения также позволяет повысить точность вычисления угла отклонения ковша зкскаватора-драглайна на 50% вследствие учета динамической составляющей момента сопротивления от раскачиваемого ковша и увеличить производительность экскаватора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОГО ОТКЛОНЕНИЯ КОВША ЭКСКАВАТОРА ОТ ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 1971 |
|
SU309235A1 |
| Устройство для управления механизмом поворота драглайна | 1986 |
|
SU1384682A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Устройство для учета работы транспортного оборудования | 1984 |
|
SU1182123A2 |
| Устройство для взвешивания ковшадРАглАйНА | 1979 |
|
SU804775A1 |
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Тренажер машиниста одноковшового экскаватора | 1986 |
|
SU1350659A1 |
| Устройство автоматического контроля загрузки ковша экскаватора | 1978 |
|
SU866076A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1985 |
|
SU1258958A1 |
1. УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОГО ОТКЛОНЕНИЯ КОВША ЭКСКАВАТОРА ОТ ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ, содер жащее датчик тока якорной цепи дви- гателя поворота платформы, датчик скорости, блок вычисления параметров движения ковша и блок деления, выход которого связан с измерительным прибором, о тли чающее с я тем, что, с целью повышения точности измерения путем учета динамической составляющей момента сопротивления от раскачиваемого ковша, оно снабжено датчиком массы ковша, блоком умножения и блоком определения оценки динамического момента сопротивления от раскачиваемого ковша, входы которого соединены с выходами датчиков тока якорной цепи двигателя поворота платформы и скорости, а выход соединен с одним из входов блока деления, к второму входу которого подключен выход блока умножения, входы которого соединены с выходами датчика массы ковша и блока вычисления параметров движения ковша. 2. Устройство по п.I, отличающееся тем, что блок определения оценки динамического момента 9 сопротивления от. раскачиваемого ковша выполнен в виде последовательно соединенных первого сумматора, инерционного звена и второго сумматора, другой вход которого соединен с одним из входов первого сумматора непосредственно, причем оба йхода первого сумматора являются входами блока определения оценки динамического момента сопротивления от раскачиваемого ковша, а его выходом явСО ляется выход второго сумматора. ел 
UJ
Ui
ifs
ФтЛ
иг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА ОТКЛОНЕНИЯ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 1972 |
|
SU420741A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОГО ОТКЛОНЕНИЯ КОВША ЭКСКАВАТОРА ОТ ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 0 |
|
SU309235A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
