Изобретение относится к области управления экскаваторами, а именно к механизмам поворота драглайна и механической лопаты.
Целью изобретения является повышение производительности экскаватора за счет ограничения колебаний ковша и упрощение устройства.
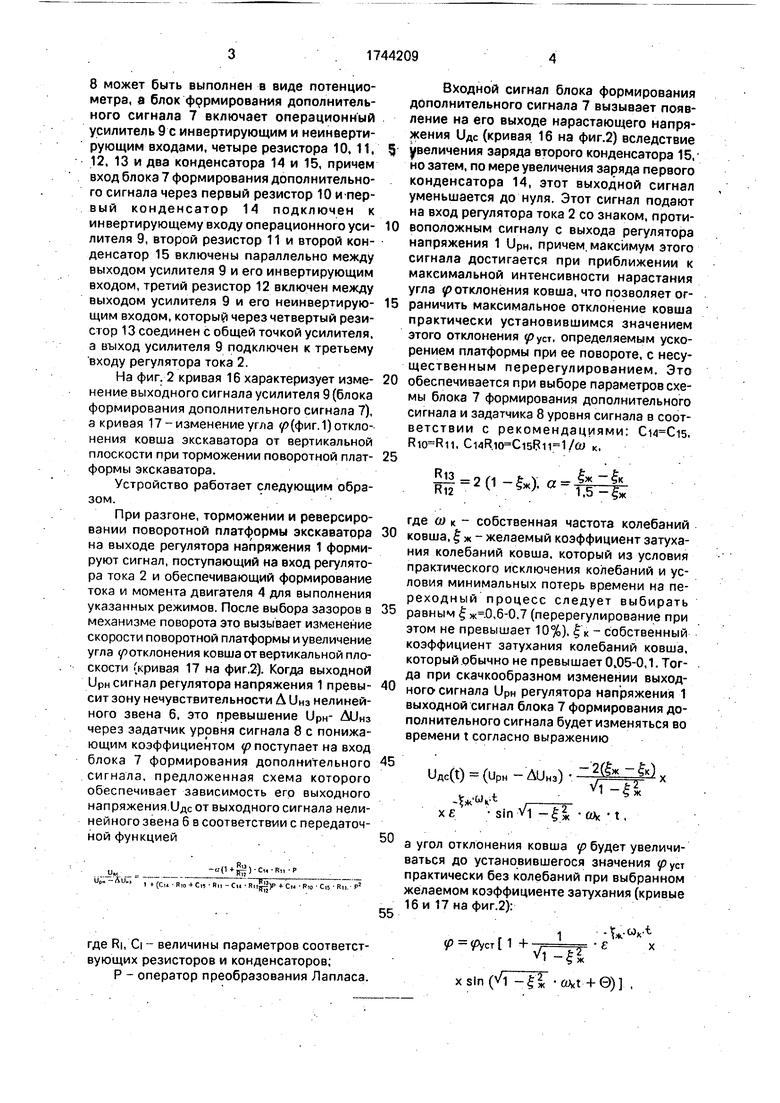
На фиг. 1-2 приведены функциональная схема устройства (фиг.1) и поясняющие его работу графики (фиг.2).
Устройство для управления механизмом поворота экскаватора включает регулятор напряжения 1, выход которого соединен
с первым входом регулятора тока 2, выход которого через преобразователь 3 подключен к двигателю поворота 4, к цепи якоря которого подключен датчик тока 5, выход которого соединен с вторым входом регулятора тока 2, нелинейное звено 6 с зоной нечувствительности, блок формирования дополнительного сигнала 7 и задатчик уровня сигнала 8, причем выход регулятора напряжения 1 подключен через последовательно соединенные нелинейное звено 6, задатчик уровня сигнала 8 и блок формирования дополнительного сигнала 7 к третьему входу регулятора тока 2. Задатчик уровня сигнала
S
ю о ю
8 может быть выполнен в виде потенциометра, а блок фррмированмя дополнительного сигнала 7 включает операционный усилитель 9 с инвертирующим и неинверти- рующим входами, четыре резистора 10, 11, 12, 13 и два конденсатора 14 и 15, причем вход блока 7 формирования дополнительного сигнала через первый резистор 10 и-пер- вый конденсатор 14 подключен к инвертирующему входу операционного усилителя 9, второй резистор 11 и второй конденсатор 15 включены параллельно между выходом усилителя 9 и его инвертирующим входом, третий резистор 12 включен между выходом усилителя 9 и его неинвертирующим входом, который через четвертый резистор 13 соединен с общей точкой усилителя, а выход усилителя 9 подключен к третьему входу регулятора тока 2.
На фиг. 2 кривая 16 характеризует изменение выходного сигнала усилителя 9 (блока формирования дополнительного сигнала 7), а кривая 17-изменениеугла у9(фиг.1)отклонения ковша экскаватора от вертикальной плоскости при торможении поворотной платформы экскаватора.
Устройство работает следующим образом.
При разгоне, торможении и реверсировании поворотной платформы экскаватора на выходе регулятора напряжения 1 формируют сигнал, поступающий на вход регулятора тока 2 и обеспечивающий формирование тока и момента двигателя 4 для выполнения указанных режимов. После выбора зазоров в механизме поворота это вызывает изменение скорости поворотной платформы иувеличение угла отклонения ковша от вертикальной плоскости (кривая 17 на фиг.2). Когда выходной UPH сигнал регулятора напряжения 1 превысит зону нечувствительности А Унз нелинейного звена б, это превышение UpH- ДиНз через задатчик уровня сигнала 8 с понижающим коэффициентом поступает на вход блока 7 формирования дополнительного сигнала, предложенная схема которого обеспечивает зависимость его выходного напряжения идс от выходного сигнала нелинейного звена 6 в соответствии с передаточной функцией
LRU
Up. -Su.«
-«(1+KJj) Сн-R,, P
1 +(Cu Bio + Ci5 Вп-Сн RiljJ JP +См Rra Cis Rn P2
Входной сигнал блока формирования дополнительного сигнала 7 вызывает появление на его выходе нарастающего напряжения Уде (кривая 16 на фиг.2) вследствие
увеличения заряда второго конденсатора 15, но затем, по мере увеличения заряда первого конденсатора 14, этот выходной сигнал уменьшается до нуля. Этот сигнал подают на вход регулятора тока 2 со знаком, противоположным сигналу с выхода регулятора напряжения 1 1)рн. причем максимум этого сигнала достигается при приближении к максимальной интенсивности нарастания угла отклонения ковша, что позволяет ограничить максимальное отклонение ковша практически установившимся значением этого отклонения у уст, определяемым ускорением платформы при ее повороте, с несущественным перерегулированием. Это
обеспечивается при выборе параметров схемы блока 7 формирования дополнительного сигнала и задатчика 8 уровня сигнала в соответствии с рекомендациями: , , Ci4Rio Ci5Rii 1/cu к,
Rl3 -г)( „ ж §к (1 Ј) а-1.5-Јж
где (а к - собственная частота колебаний ковша, Ј ж - желаемый коэффициент затухания колебаний ковша, который из условия практического исключения колебаний и условия минимальных потерь времени на переходный процесс следует выбирать равным Ј ж.0,6-0,7 (перерегулирование при этом не превышает 10%), Јк - собственный коэффициент затухания колебаний ковша, который обычно не превышает 0,05-0,1. Тогда при скачкообразном изменении выход- ного сигнала UpH регулятора напряжения 1 выходной сигнал блока 7 формирования дополнительного сигнала будет изменяться во времени t согласно выражению
UAC(t) (uPH -Динз) ffi./K)х
1 ъ ж
ХЕ-Sin V1 -Ј ft) t ,
а угол отклонения ковша р будет увеличиваться до установившегося значения у уст практически без колебаний при выбранном желаемом коэффициенте затухания (кривые 16 и 17 на фиг.2):

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления механизмом поворота экскаватора-драйглайна | 1977 |
|
SU653347A1 |
| Устройство для управления поворотом одноковшового экскаватора | 1977 |
|
SU682615A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Устройство управления электроприводом тяги экскаватора-драглайна | 1981 |
|
SU956697A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Устройство для ограничения динамических усилий в канатах экскаватора | 1977 |
|
SU609848A1 |
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |

Устройство содержит регуляторы напряжения (РН) и тока (РТ). Преобразователь подключен к двигателю поворота, к цепи якоря которого подключен датчик тока. Устройство снабжено нелинейным звеном (Н) с зоной нечувствительности, блоком (БФ) формирования дополнительного сигнала и задатчиком уровня сигнала. При малых значениях выходного сигнала РН сигнал через Н на БФ не проходит. Выходной сигнал БФ равен нулю. Т.о. в таких режимах, как позиционирование ковша, исключается неоправданное увеличение длительности переходных процессов. За счет этого увеличивается производительность экскаватора. При больших расстояниях ковша от стрелы горизонтальные .нагрузки на стрелу незначительны, поэтому, в отличие от известного устройства, дополнительный сигнал, поступающий с выхода БФ на вход РТ, не увеличивают. Тем самым также исключается затягивание переходных процессов и повышается производительность комбайна. 2 ил. сл с
где Ri, Ci - величины параметров соответствующих резисторов и конденсаторов;
Р - оператор преобразования Лапласа.
1
Гж
-ам+е;
..Ык-t
е х
где 0 arctgV-L.-i
5ж
Тем самым обеспечивается эффективное ограничение колебаний ковша и горизонтальных нагрузок на стрелу, повышение надежности экскаватора.
В приведенных выражениях значение со к целесообразно выбирать в соответствии с собственной частотой колебаний ковша при его нахождении у вершины стрелы перед разгрузкой, где опасность возникновения больших горизонтальных нагрузок на стрелу является наибольшей.
При больших расстояниях ковша от стрелы (например, в глубоком забое) собственная частота колебаний ковша уменьшается (увеличивается период колебаний), но одновременно уменьшается опасность возникновения больших горизонтальных нагрузок на стрелу и здесь, согласно предложению, не увеличивают, в отличие от прототипа, длительность воздействия сигнала, обеспечивающего гашение колебаний, на вход регулятора тока 2. тем самым исключают неоправданное затягивание переходных процессов и увеличивают производительность экскаватора.
При малых значениях выходного сигнала регулятора напряжения 1 (в процессе выбора зазоров в передаче механизма, при позиционировании ковша) нелинейное звено б с зоной нечувствительности не пропускает сигнал на вход блока 7 формирования дополнительного сигнала, т.е. его выходной сигнал равен нулю, и в этих режимах, когда отсутствует опасность возникновения больших горизонтальных нагрузок на стрелу, тем самым исключают неоправданное увеличение длительности переходных процессов, что повышает производительность экскаватора.
Количество используемых в предложенном устройстве элементов значительно меньше, чем в прототипе, и они проще, что упрощает устройство и его наладку. 5 Изобретение позволяет повысить производительность экскаватора и упростить устройство и его наладку при обеспечении высокой эффективности ограничения колебаний ковша и горизонтальных нагрузок на
0 стрелу, что повышает надежность рабочего оборудования экскаватора.
Предложенное устройство может применяться не только для управления механизмом поворота драглайна, но и на мощных экскава5 торах - механических лопатах, для ограничения раскачивания ковша с рукоятью и тем самым упрощения позиционирования ковша при разгрузке и в забое, что также повысит производительность экскаватора.
0
Формула изобретения Устройство для управления механизмом поворота экскаватора, содержащее регулятор напряжения, выход которого со5 единен с первым входом регулятора тока. . выход которого нерез преобразователь подключен к двигателю поворота, к цепи якоря которого подключен датчик тока, о т- личающееся тем. что, с целью
0 повышения производительности экскаватора за счет ограничения колебаний ковша и упрощения устройства, оно снабжено нелинейным звеном с зрной нечувствительности, блоком формирования дополнительного
5 сигнала и задатчиком уровня сигнала, причем выход регулятора напряжения подключен через последовательно соединенные нелинейное звено, задатчик уровня сигнала и блок формирования до0 полнительного сигнала к третьему входу регулятора тока.
tpwf
я
уст
fe
| Устройство для управления механизмом поворота драглайна | 1986 |
|
SU1384682A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления механизмом поворота драглайна | 1984 |
|
SU1209783A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| , | |||
