Изобретение относится к транспортной технике и может быть использовано при погрузочно-разгрузочной работе на перевалочных пунктах л елезнодорожного транспорта, в складах и т. п.
Известны самоходные изгибающиеся конвейеры, содержащие раму, состоящую из щарнирно соединенных между собой концевых и средних секдий с ходовыми колесами, снабженными приводными механизмами и механизмами поворота секций в горизонтальной плоскости, гибкую грузовую ленту, механизмы привода и натяжения ленты и механизмы управления. Однако в этих конвейерах наблюдается отклонение движения средних секций, что приводит к ВОЗМОЖНОСТИ встречи конвейера с боковыми препятствиями.
Целью изобретения является обеспечение каждой секции по траектории, заданной движением головной секции.
Это достигается тем, что конвейер снабжен корректирующим з стройством, которое выполнено в виде бесконечной цепи, укладываемой головной секцией на грунт и содержащей звенья Т-образного сечения, индуктивно, взаимодействующие своими вертикальными пластинами с датчиками, жестко установленными на осях ходопых жолес и воздействующими на механизмы поворота секций.
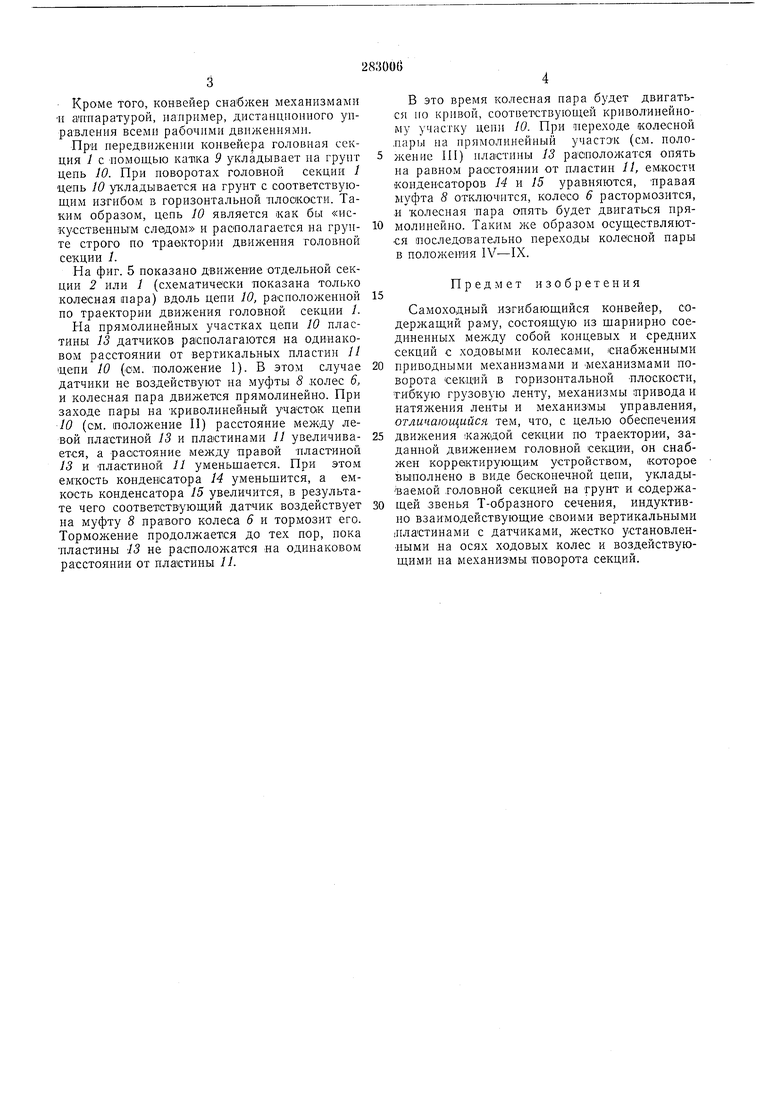
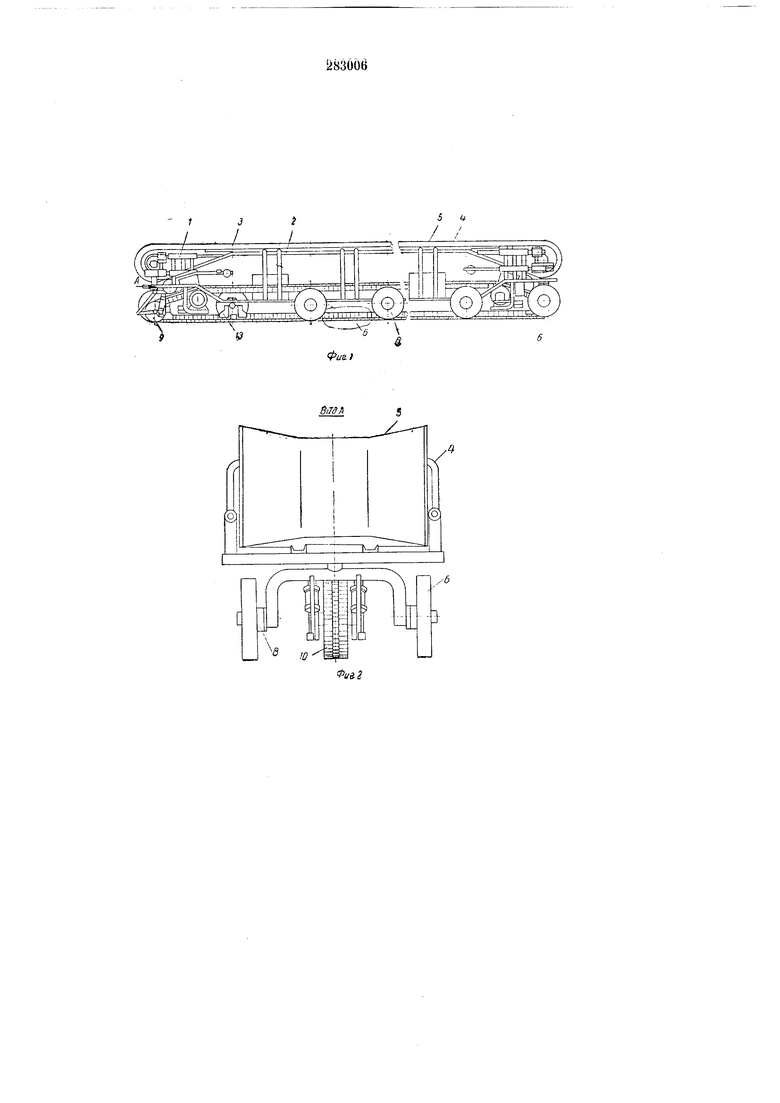
На фиг. 1 схематически изображен описываемый конвейер, общий вид; на фиг. 2- вид но стрелке А; на фиг. 3 - узел Б на фнг. 1; на фиг. 4 - разрез по В-В на фиг. 3; на фиг. 5--схема отдельной секции конвейера.
Конвейер состоит из концевых секций / и средних секций 2, шарнирно соединенных
между собой по вертикальным осям 3. В направляющих 4 рамы перемещается гибкая грузовая лента 5. На концевых секциях / смонтированы механизмы привода и натяжения ленты 5. секция / или 2 снабжена парой ходовых колес 6, установленных на одной оси 7. Колеса снабжены приводными механизмами п механизмами поворота секций. Этп Механизмы представляют собой, например, электромагнитные тормозные муфты 8, установленные на калсдом колесе 6.
Концевые секцин / снаблсены катками 9, огибаемыми бесконечной цепью 10, звенья которой имеют Т-образное сечение, и состоят из вертикальных и опорных пластин 11 и 12. На
оси 7 ходовых колес 6 установлены пластнны 13 датчиков, которые располагаются по обе стороны от вертикальных нластин 11 и выполняют роль пластин конденсаторов. Каждая пластина 13 электрически связана с соответКроме того, конвейер снабжен механизмами и атпаратурой, например, дистанционного унравления всеми рабочими движениями.
ПрИ нередвижении конвейера головная секция 1 с помощью KaiiKa 9 укладывает на грунт цень 10. При иоворотах головной секции / цепь 10 укладывается на грунт с соответствующим нзгнбо.м в горизонтальной нлоокости. Таким образом, цепь 10 является «ак бы «искусственным следом н располагается на грунте строго но траектории движения головной секции 1.
На фиг. 5 показано движение отдельной секции 2 или / (схематически показана только колесная пара) вдоль цеии 10, расположенной но траектории движения головной секции 1.
На прямолинейных участках цени 10 пластины 13 датчиков располагаются на одинаковом расстоянии от вертикальных пластин // щенн 10 (см. ноложение 1). В этом случае датчики не воздействуют на муфты 8 колес 6, и колесная пара движется прямолинейно. При заходе нары на криволинейный участак цепи 10 (см. положение II) расстояние между левой нластиной 13 и пластинами // увеличивается, а расстояние между правой пластиной 13 н пластиной 11 уменьн1ается. При этом емкость конденсатора 14 уменьщится, а емкость конденсатора 15 увеличится, в результате чего соответствующий датчик воздействует на муфту 8 правого колеса 6 н тормозит его. Торможение продолжается до тех нор, нока нластины i3 не расположатся на одинаковом расстоянии от пластины 11.
В это время колесная пара будет двигаться 1ГО кривой, соответствующей криволииейному участку цеии 10. При переходе колесной пары на нрямолинейный участок (см. положение III) нластииы 13 расположатся опять на равном расстоянии от пластин 11, емкости конденсаторов 14 и 15 уравняются, правая муфта 8 отключится, колесо 6 растормозится, .и колесная пара опять будет двигаться прямолинейно. Таким же образом осуществляются последовательно переходы колесной пары в положения IV-IX.
Предмет изобретения
Самоходный изгибающийся конвейер, содержащий раМу, состоящую из щариирио соединенных между собой концевых н средних секций с ходовыми колесами, снабженными
приводными механизмами и механизмами поворота секций в горизонтальной плоскости, гибкую грузовую ленту, механизмы привода и натяжения ленты и механизмы унравления, отличающийся тем, что, с целью обеспечения
движения каждой секции по траектории, заданной движением головной секции, он снабжен корректирующим устройством, которое выполнено в виде бесконечной цепи, укладываемой головной секцией на грунт и содержащей звенья Т-образного сечения, индуктивно взаимодействующие своими вертикальными лластинами с датчиками, жестко установленпыми на осях ходовых колес и воздействующими на механизмы поворота секций.
,,ii,,i,i,UEI
Узвлб
Фиг.З в-в
Х
12 Фие.
.
Фиг 5
