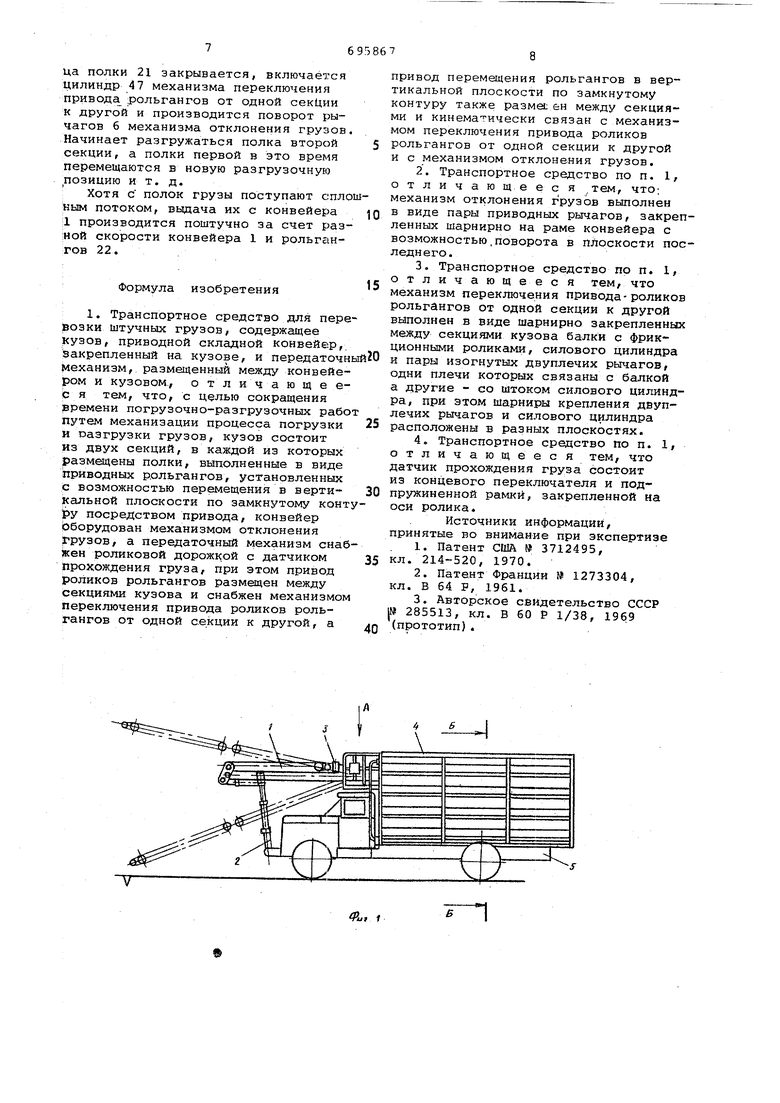
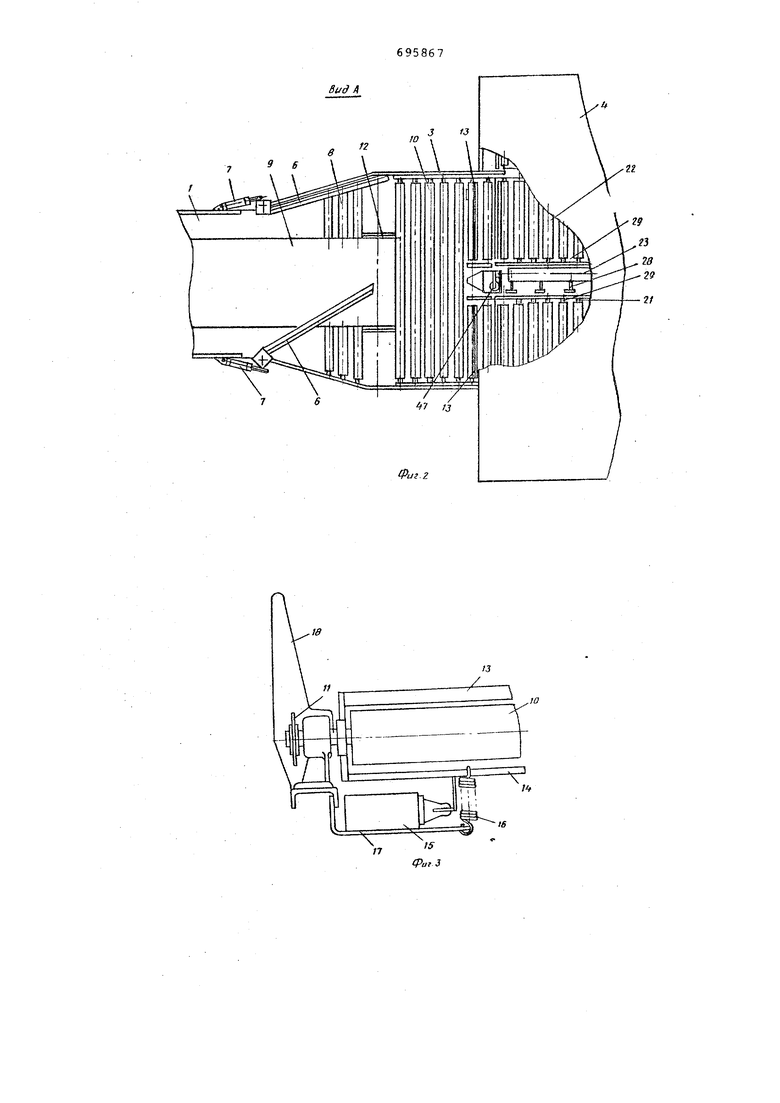
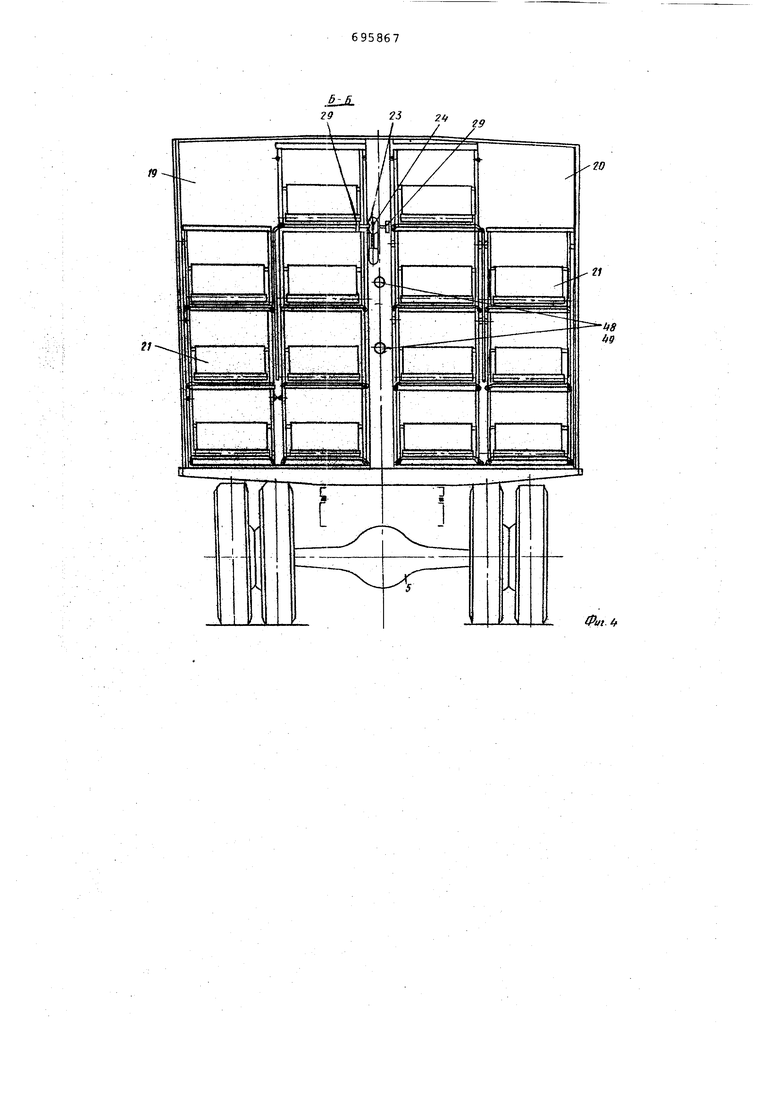
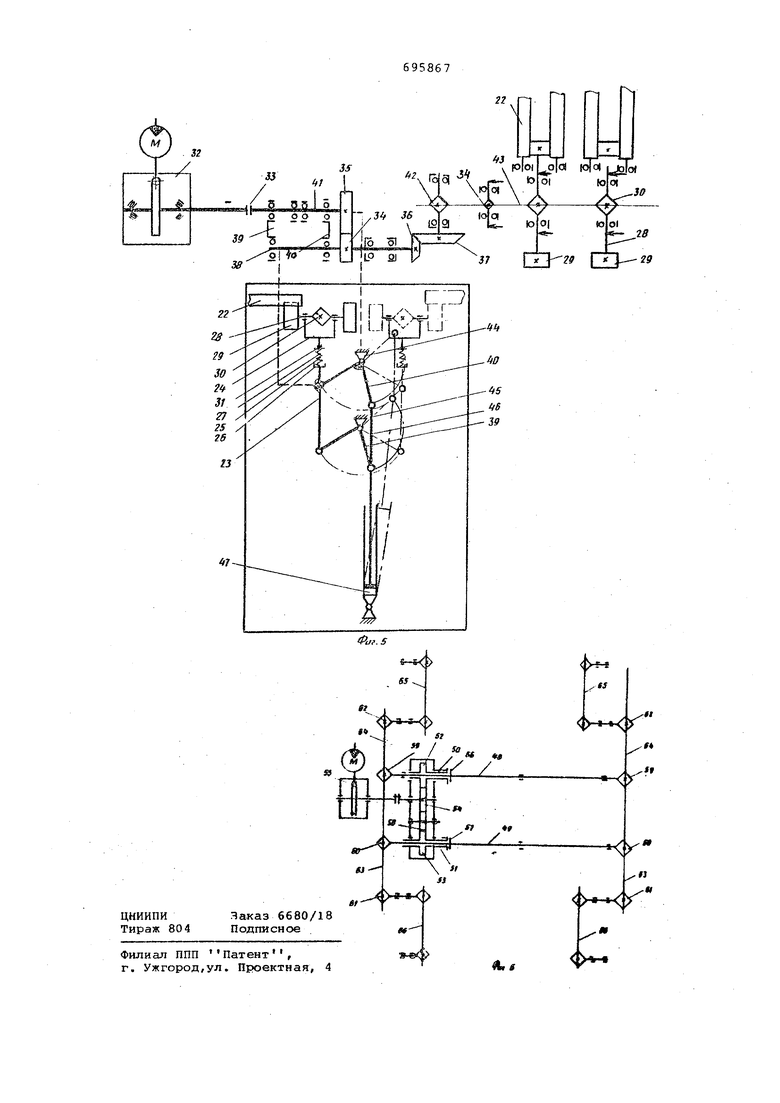
(54) ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ШТУЧНЫХ ГРУЗОВ Известно также транспортное средство для перевозки штучных грузов, содержащее кузов, приводрюй складной конвейер, закрепленный на кузове, и передаточный механизм, размещенный между конвейером и кузовом 3. Недостатком этого транспортного :средства является большие затраты времени на погрузочно-разгрузочные работы. Цель изобретения - сокращение вр ;мени погрузочно-разгрузочных работ : путем механ1}зации процесса погрузки и разгрузки грузов. Эта цель достигается тем, что кузов состоит из двух секций, в каждой из которых размещены полки, выполненные в виде приводных ролъга гов, установленных с возможностью перемещения в вертикальной плоскости по замкнутому контуру посредством привода, конвейер оборудован механизмом отклонения грузов, а передаточный механизм снабжен роликовой дорожкой с датчиком прохождения груза, при этом привод ролико рольгангов размещен между секциями кузова и снабжен механизмом переклю чения привода роликов рольгангов от одной секции к другой, а привод перемещения рольгангов в вертикаль ной плоскости по замкнутому контуру также размещен между.секциями и кин матически связан с механизмом пере ключения привода роликов рольганго от одной секции к другой и с механизмом отклонения грузов. Кроме то механизм отклонения грузов выполнен в видеПары приводных рычагов, закрепленных шарнирно на раме конвейера с возможностью поворота в плоскости последнего. Механизм переключения привода роликов рольган гов от одной секции к другой выпол нен в виде шарнирно закрепленных между секциями кузова балки с фрик ционными роликами, силового цилинд и пары-изогнутых двуплечих рычагов одни плечи которых связаны с балкой, а другие - со штоком силового цилиндра, при этом шарниры крепления двуплечих рычагов и силового цилиндра расположены в разных плос костях. Датчик прохождения груза состоит из концевого пepeключaтe iя и подпружиненной рамки, закрепленн на оси ролика. На фиг. 1 изображен общий вид транспортного средства; на фиг. 2 вид А на фиг. 1; на фиг. 3 - датчси прохождения грузов; на фиг. 4 - ра рез Б-Б на фиг. 1; на фиг. 5 - кин матическая схема- привода роликов рольганга и механизма.переключения привода роликов рольганга от одной секции кузова к другой; на фиг. 6 инематическая схема привода перемедения рольгангов а вертикальной лоскости по эамк1утому контуру. Тралспортное средство содержит риводной складной конвейер 1, регулируемый по высоте гидроподъемником 2, передаточный механизм 3, установленный между конвейером 1 и кузовом 4, и самоходное шасси 5. Конвейер 1 оборудован механизмом отклонения грузов, вылолненным в виде пары приводных рычагов б, способны: поворачиваться на различные углы в плоскости конвейера 1 и приводимые в действие гидроприводом 7. Конвейер 1 примглкает своей расширяющейся частью к ме;санизму 3. На расширяющейся части конвейера имеются ролики 8, вращг.ем1:ае лентой 9 конвейера. Механизм 3 включает в себя роликовую дорожку, снабженную роликом 10, приводимую во враа1ение посредством депной передачи (на чертеже не показана) через звездочку ,11 от приводного барабана 12 конвейера 1 и датчиком прохождения грузов, выполненным в виде рамки, шарнирно закрепленной на оси ролика 10. Верхняя часть 13 рамки взаимодействует с проходящим грузом, а нижняя 14 часть с концевым переключателем 15. Для уравновешивания рамки в нейтральном положении имеется пружина 16, закрепленная одним концом на кронштейне 17. Цепная передача со звездочкой 11 закрыта кожухом 18. Кузов 4 содержит две секции 19, и 20, где размещены полки 21, грузо- несущая поверхность которых выполнена в виде рольганга 22. Привод вращения роликов рольганга выполнен в виде балки 23, которая содержит кронштейн 24 установленный своим хвостовиком 25 в направляющую 26 и под.пружинен пружиной 27. На валу 28 кронштейна 24 установлены приводные фрикционные ролики 29 и звездочка 30 с возможностью качания относительно оси 31, Такая конструкция кронштейна 24 обеспечивает плотное прилегание всех роликов 29 к роликаг.1 рольганга 22. Ролики 29 связаны с приводом 32 через муфту 33. При этом привод роликов рольгангов снабжен механизмом переключения привода роликов рольгангов от одной секции к другой. Механизм передачи вращения роликам 29 состоит из пары зубчатых колес 34 и 35 и пары конических колес 36 и 37, причем колесо 34 имеет возможность совершать колебательное . движение относительно колеса 35 за счет установки его на валу 38, качающегося на рычагах 39 н 40 относительно вала 41, несутйего колесо 35 и закрепленного в подшипниках рамы кузова 4, а на валу колеса 37 установлена звездочка 42, огибаемая бесконечной цепью 43. Механизм переключения привода ро ликов рольгангов от одной секции к другой включает два щарнирно закрепленных на кронштейнах 44 и 45 изогнутых рычага 39 и 40, которые связаны между собой тягой 46, и образуют шарнирный параллелограмм, приводимый в действие силовым цилин ром 47. Указанный механизм перемещает ба ку 23 с роликами 29 от одной секци кузова к другой. Для обеспечени;надежной работы шарнирного параллелограмма, исключения мертвого положения шарниры закрепления- рычагов 39 и 40 на кронштейнах 44 и 45 и крепления цилиндра 47 находится в разных плоско тях.. Привод перемещения рольгангов в вертикальной плоскости содержит два трансмиссионных вала 48 и 49, прохо дящих сквозь полые валы 50 и 51, на которых установлена зубчатые колеса 52 и 53, входящие в зацепление с зубчатым колесом приводного вала 54 привода 55, и муфтй 56 и 57. Применение полых валов позволяет умень шить габариты установки, разместив редуктор на валах 48 и 49. Паразитное колесо 58 в редукторе Установле ДЛИ обеспечения необходимого направ ления Перемещений полок соседней се ции кузова. По концам валов 48 и 49 установлены звездочки 59 и 60, переданзщие крутящий момент,ни приводные звездочки 61 и 62 механизма перемещения рольгангов соответствующей секции, посредством бесконечных цепей 63 и 64, 65 и 66 соотвётсттвенно. Для обеспечения сохранности груз при перемещении полок 21 по замкнут му контуру секций 19 и 20 кузова вс полки снабжены дверца ш. Установка работает следующим образом. С помощью шасси 5 производится подъезд к объектам загрузки или разгрузки, конвейер 1 устанавливает ся в рабочее положение на уровень порога багажного отсека самолета или других устройств, например, конвейера аэровокзала, посредством гидроподъемника 2 и включается привод ленты 9 конвейера 1, привод 32 вращения роликов рольганга 22 полок 21 на загрузку или выгрузку, привод 55 перемещения рольгангов в вертикальной плоскости, открываетсй дверца полки 21, находящейся в загрузочно-разгрузочной позиции. Загрузка установки производится следующим образом. Штучные грузы укладываются или поступают с других устройств на приемную часть конвейера 1 и, с помощью ленты 9 перемещаются ,по конвейеру 1 к механизму отклонения грузов, рычаги 6 которого направляют штучные грузы в соответствующие секции 19 и 20 через механизм 3, .где взаимодействуют с верхней частью 13 датчика прохождения грузов, который своей нижней частью 14 воздействует на концевой переключатель 15, подающий сигналы на включение муфты 33, передающей крутящий момент на фрикционные ролики 29. Приводные фрикционные ролики 29 вращают ролики рольганга 22 до тех пор, пока не освободится от груза верхняя часть 13 датчика прохождения грузов, что свидетельствует о поступлеЕ{ии груза на полку 21. При поступлении следующего груза на механизм 3 операции повторяются до полного заполнения полки. Таким образом производится последователь- . ное накопление груза на полке до ее полного заполнения, что фиксируется полочным датчиком (на чертеже не показан). Затем подается сигнал, дверца полки 21 закрывается во избежание повреждений грузов, и включается цилиндр 47 механизма, переключения привода роликов рольганга от одной секции к другой, где свободная полка 21 уже находится в загрузочной позиции. Подается сигнал также на механизм отклонения грузов, рычаги в которого поворачиваются и Направляют грузы на свободную полку соответствующей секции. В конце своего перемещения балка 23,Обеспечив контакт роликов 29 с рольгангом 22 свободной секции, воздействует на датчик (на чертеже не показан), включающий муфту 56 или 57, соответственно, привода 55 перемещения рольганга в вертикальной плоскости в секции с только что загруженной полкой. Пока происходит заполнение второй секции полки соседней секции перемещаются для установки следую-, щай свободной полки в загрузочную позицию. После заполнения всех полок обеих секций отключаются привод 32 и привод 55, конвейер 1 складывается в транспортное положение и производится транспортировка груза до объекта разгрузки. Разгрузка производится следующим образом. Установив конвейер 1 гидроподъемником 2 в нужное положение, включают привод ленты 9 конвейера и привод 32 через муфту 33, при этом ролики 29 вращают ролики рольганга 22 до тех пор, пока она полностью не будет освобождена от грузов, после чего дверца полки 21 закрывается, включается цилиндр 47 механизма переключения привода рольгангов от одной секЦии к другой и производится поворот рычагов 6 механизма отклонения грузов Начинает разгружаться полка второй секции, а полки первой в это время перемещаются в новую разгрузочную позицию и т. д. Хотя с полок грузы поступают спло ным потоком, в адача их с конвейера 1 производится поштучно за счет разной скорости конвейера 1 и рольггшгов 22. Формула изобретения 1. Транспортное средство для пере возки штучных грузов, содержащее кузов, приводной складной конвейер, Закрепленный на кузове, и передаточн механизм, размещенный между конвейе ром и кузовом., отличающее ся тем, что, с целью сокращения времени погрузочно-разгрузочных рабо путем механизации процесса погрузки и разгрузки грузов, кузов состоит из двух секций, в каждой из которых размещены полки, вьшолненные в виде приводных рольгангов, установленных с возможностью перемещения в вертикальной плоскости по замкнутому кон ру посредством привода/ конвейер Оборудован механизмом отклонения jrpyaoB, а передаточный механизм сна жен роликовой дорож1 ой с датчиком прохождения груза, при этом привод роликов рольгангов размещен между секциями кузова и снабжен механизмо Переключения привода роликов рольгангов от одной секции к другой, а привод перемещения рольгангов в вертикальной плоскости по замкнутому контуру также pasMet ен между секциями и кинематически связан с механизмом переключения привода роликов рольгангов от одной секции к другой и с механизмом отклонения грузов. 2.Транспортное средство по п. 1, отличаю щ.ееся тем, что; механизм отклонения грузов выполнен в виде пары приводных рычагов, закрепленных шарнирно на раме конвейера с возможностью,поворота в плоскости последнего. 3.Транспортное средство по п. 1, отличающеес я тем, что механизм переключения привода-роликов рольгангов от одной секции к другой выполнен в виде шарнирно закрепленных между секциями кузова балки с фрикционными роликами, силового цилиндра и пары изогнутых двуплечих рычагов, одни плечи которых связаны с балкой а другие - со штоком силового цилиндра, при этом шарниры крепления двуплечих рычагов и силового цилиндра расположены в разных плоскостях. 4.Транспортное средство по п. 1/ отличающееся тем, что датчик прохождения груза состоит из конЦевого переключателя и подпружиненной рамки, закрепленной на оси ролика. Источники информации, принятые во внимание при экспертизе 1. Патент США 3712495, 214-520, 1970. 2. Патент Франции 1273304, В 64 Р, 1961. 3. Авторское свидетельство СССР 1 285513, кл. В 60 Р 1/38, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сбрасывания длинномерных грузов | 1989 |
|
SU1713870A1 |
| Устройство для передачи штучных грузов | 1981 |
|
SU971745A1 |
| Накопитель штучных грузов для поточных линий | 1977 |
|
SU719933A1 |
| Вагон для пакетированных грузов | 1988 |
|
SU1684200A1 |
| Транспортное средство для перевозки баллонов со сжиженным газом | 1989 |
|
SU1731663A1 |
| Вертикальный конвейер | 1982 |
|
SU1077829A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Транспортное средство для перевозки штучных грузов | 1979 |
|
SU893626A1 |
| Конвейерное устройство для перемещения груза из крытого вагона | 1988 |
|
SU1640081A1 |
13
IS
