Изобретение относится к конвейерному устройству и системам и, в частности, к конвейерному механизму для использования с непрерывной конвейерной лентой, оборудованному ведомым шкивом, вокруг которого может проходить конвейерная лента и изменять направление своего движения на обратное.
Ленточные конвейеры хорошо известны и являются действенными средствами для перемещения больших количеств материалов, таких как руда, уголь и гранулированный камень на заданное расстояние, либо в горизонтальном направлении, либо в вертикальном направлении, либо в обоих направлениях сразу. Конвейерная система одного вида, известная в горнодобывающей промышленности, является системой, содержащей ряд конвейеров, установленных на колесах так, чтобы сделать систему подвижной. Из-за методов, которыми разрабатываются и расширяются шахты, может возникнуть необходимость в относительно длинной конвейерной системе, обеспечивающей перемещение, по существу, по криволинейной или зигзагообразной направляющей. При таких обстоятельствах может быть трудным и трудоемким перемещать конвейерную систему, когда это необходимо. Также должно быть понятно, что достаточно часто может возникать необходимость в перемещении конвейерной системы и внесения корректировок в систему, поскольку добывающие механизмы продвигаются вперед в шахтах.
В патенте США № 5366059, опубликованном 22 ноября 1994 г. на имя компании Prairie Machine & Parts Mfg, Ltd., описана и проиллюстрирована конвейерная система, содержащая транспортные тележки, соединенные вместе в форме состава, а также описывает систему управления для управления этим составом транспортных средств. У всех, кроме одного из транспортных средств в этом составе, имеется единственная пара управляемых колес с транспортным средством на дальнем от забоя конце состава (который является концом, к которому доставляется добытый ископаемый материал), которое имеет два управляемых колеса. Для управления каждой из пар управляемых колес используются гидравлические цилиндры, при этом также имеется механизм управления для управления и координирования работой этих цилиндров для того, чтобы установить углы поворота пар колес. В этой известной системе каждая пара колес установлена на оси, и каждая пара приводится в действие электрическим трамвайным двигателем, установленным вдоль продольного центра транспортной тележки. Одна трудность, с которой сталкиваются при использовании этой известной конвейерной системы, состоит в том, что система является относительно высокой вдоль большей части длины состава, и поэтому потолок области месторождения, где работает добывающий механизм, должен быть соответственно высоким, например более шести футов (одного метра восьмидесяти сантиметров) в высоту, чтобы разместить эту конвейерную систему.
Имеется потребность в механизме ведомого шкива для изменения направления движения конвейерной ленты на обратное, который установлен на опорном элементе шкива, который может быть повернут вокруг в целом вертикально проходящей оси, и в соединительной несущей конструкции для этого опорного элемента шкива, которая содержит шарнирный соединитель для опорного элемента шкива, который позволяет последнему поворачиваться вокруг вышеупомянутой оси. Путем обеспечения механизма для поворота опорного элемента шкива вокруг оси поворота может быть обеспечено средство для поддержания конвейерной ленты в пределах желаемой центральной области ведомого шкива во время использования конвейера. В частности, имеется потребность в обеспечении нового механизма ведомого шкива и монтажа для него вышеупомянутого типа, который может быть использован в низкопрофильном конвейерном устройстве.
Кроме того, имеется потребность в создании улучшенного контроллера для управления приводом, выполненным с возможностью поворота опорного элемента шкива вокруг оси поворота с обеспечением поддержания конвейерной ленты в пределах желаемой центральной области ведомого шкива. Вышеупомянутый контроллер преимущественно представляет собой электронный контроллер, такой как программируемый логический контроллер, связанный со светолучевыми датчиками, которые определяют смещение конвейерной ленты из желаемой центральной области и благодаря которым контроллер может определить, когда конвейерная лента требует центровки.
Имеется дополнительная потребность в конвейере, в котором используется бесконечная конвейерная лента, для создания несущей конструкции для установки одного из двух шкивов конвейера, причем привод выполнен с возможностью поворота опорного элемента шкива, на котором с возможностью поворота установлен один шкив для поддержания конвейерной ленты, по существу, в отцентрованном положении во время использования конвейера. В иллюстративном варианте выполнения имеется дополнительный механизм, предназначенный для регулирования положения несущей конструкции относительно несущей конструкции конвейера, чтобы увеличить или уменьшить полное натяжение конвейерной ленты.
Одна иллюстративная форма вышеупомянутой подвижной несущей конструкции для шкива является особенно подходящей для низкопрофильного подвижного конвейера, например, имеющего размер меньше, чем пять футов (полтора метра), и предпочтительно не больше, чем четыре фута (один метр двадцать сантиметров).
В соответствии с одним аспектом изобретения конвейерное устройство, предназначенное для использования с непрерывной гибкой конвейерной лентой, содержит удлиненную несущую конструкцию конвейера, в которой противоположные продольные стороны проходят между двумя ее концами. На несущей конструкции установлены опорные устройства для конвейерной ленты, которые распределены вдоль нее для обеспечения возможности поворота конвейерной ленты. Эти опорные устройства включают механизм ведомого шкива, выполненный с возможностью изменения направления поворота конвейерной ленты на обратное, имеющий две секции ведомого шкива, установленные на опорном элементе шкива с возможностью вращения вокруг общей центральной оси вращения, проходящей в целом поперек относительно продольных сторон конструкции. Секции ведомого шкива имеют смежные внутренние концы, а опорный элемент шкива содержит центральную опорную часть, расположенную на этих внутренних концах и проходящую радиально в наружном направлении от этих внутренних концов относительно оси вращения к в целом вертикально проходящей оси поворота. Устройство дополнительно содержит соединительное опорное устройство или механизм для установки опорного элемента шкива на несущей конструкции конвейера, причем это устройство или механизм содержит шарнирный соединитель, соединяющий центральную опорную часть с соединительным опорным устройством для обеспечения поворотного движения вокруг оси поворота. Также предусмотрено поворотное устройство или механизм, предназначенный для поворота опорного элемента шкива вокруг оси поворота, чтобы поддерживать конвейерную ленту в пределах желаемой центральной области ведомого шкива, образованной секциями ведомого шкива во время использования конвейерного устройства.
В иллюстративном варианте выполнения конвейерного устройства поворотный механизм содержит управляющий рычаг конвейерной ленты, прочно прикрепленный к центральной опорной части для обеспечения поворотного движения, и гидравлический линейный приводной механизм, имеющий приводную тягу, соединенную с возможностью поворота с рычагом управления.
В соответствии с другим аспектом изобретения конвейерное устройство, предназначенное для использования с бесконечной гибкой конвейерной лентой, для перемещения добытого ископаемого материала содержит удлиненную несущую конструкцию конвейера, в которой противоположные продольные стороны проходят между двумя ее концами, и опорные устройства для конвейерной ленты, установленные на несущей конструкции и распределенные вдоль нее для обеспечения возможности поворота конвейерной ленты. Эти опорные устройства включают механизм ведомого шкива, выполненный с возможностью изменения направления поворота конвейерной ленты на обратное, установленный на опорном элементе шкива с возможностью вращения вокруг центральной оси вращения, проходящей в целом поперек относительно продольных сторон конструкции. Также предусмотрено опорное устройство или механизм для установки опорного элемента шкива на несущей конструкции конвейера. Опорный элемент шкива установлен на опорном устройстве или механизме с возможностью выполнения поворотного движения вокруг, по существу, вертикально проходящей оси поворота. Приводной механизм предназначен для осуществления поворота опорного элемента шкива и его механизма ведомого шкива вокруг оси поворота, чтобы поддерживать конвейерную ленту в пределах желаемой центральной области механизма ведомого шкива во время использования конвейерного устройства. Предусмотрен электронный контроллер, предназначенный для управления работой приводного механизма. Также имеется светолучевой датчик, который определяет смещение конвейерной ленты из желаемой центральной области и извещает об этом смещении контроллер. Когда луч света светолучевого датчика заблокирован конвейерной лентой во время использования конвейерного устройства, контроллер заставляет приводной механизм поворачивать опорный элемент шкива в направлении, которое имеет тенденцию увеличивать натяжение в конвейерной ленте на ее продольной стороне, где луч света заблокирован.
В иллюстративном варианте этого конвейерного устройства датчик включает два излучающих фотоэлемента и два фотоприемника, причем каждый излучающий фотоэлемент и совмещенный с ним фотоприемник расположены смежно с соответствующей одной из двух внешних концевых секций механизма ведомого шкива.
В соответствии с дальнейшим аспектом изобретения предложено конвейерное устройство, предназначенное для использования с бесконечной конвейерной лентой, которая проходит вокруг двух шкивов, изменяющих направление движения конвейерной ленты на обратное, и выполнена с возможностью работы под натяжением. Этот устройство содержит несущую конструкцию конвейера и невращающийся опорный элемент шкива, на котором установлен один из двух шкивов с возможностью вращения вокруг оси вращения. Также дополнительно предусмотрено подвижное опорное устройство или механизм для установки опорного элемента шкива на несущей конструкции конвейера. Опорный элемент шкива установлен на опорном устройстве или механизме с возможностью выполнения поворотного движения вокруг, по существу, вертикально проходящей оси поворота. Имеется приводной механизм, предназначенный для осуществления поворота опорного элемента шкива и его механизма ведомого шкива вокруг оси поворота с обеспечением поддержания конвейерной ленты в, по существу, отцентрованном положении с одним механизмом ведомого шкива во время использования конвейерного устройства. Кроме того, имеется регулирующий механизм для осуществления регулирования положения части опорного механизма относительно несущей конструкции для того, чтобы увеличить или уменьшить полное натяжение в конвейерной ленте. Этот регулирующий механизм выполнен с возможностью перемещения опорного элемента шкива и его устройства шкива от другого устройства шкива для увеличения натяжения.
В иллюстративном варианте выполнения вышеупомянутого конвейерного устройства подвижное опорное устройство или механизм содержит два параллельных отделенных друг от друга соединительных элемента, установленных с возможностью поворота на несущей конструкции конвейера, внутренние концы которых расположены рядом или на продольной средней линии несущей конструкции, которая является удлиненной и, по существу, прямоугольный на виде сверху. Также предусмотрен центральный элемент монтажной конструкции, присоединенный с возможностью поворота к внутренним концам соединительных элементов, при этом опорный элемент шкива соединен с возможностью поворота с центральным элементом монтажной конструкции.
Эти и другие аспекты раскрытого конвейерного устройства и регулируемого ведомого шкива станут более очевидны для специалистов в этой области, исходя из следующего подробного описания, взятого совместно с сопровождающими чертежами.
На чертежах:
Фиг.1 представляет собой вид сверху иллюстративного варианта выполнения конвейерного устройства, выполненного в соответствии с изобретением;
Фиг.2 представляет собой вид сбоку конвейерного устройства, изображенного на Фиг.1;
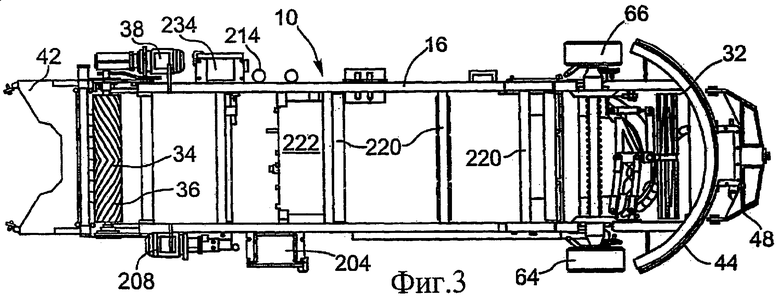
Фиг.3 представляет собой вид снизу конвейерного устройства, изображенного на Фиг.1 и 2;
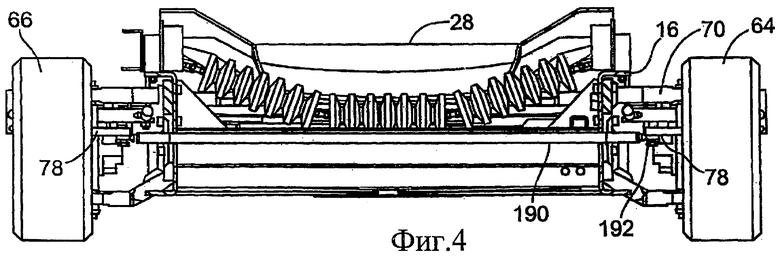
Фиг.4 представляет собой вид сбоку части устройства, взятое по линии IV-IV, показанной на Фиг.2;
Фиг.5 представляет собой вид в аксонометрии, если смотреть сверху и от конца ведомого шкива конвейерного механизма, причем этот вид показывает концевую секцию механизма, включающую его два колеса;
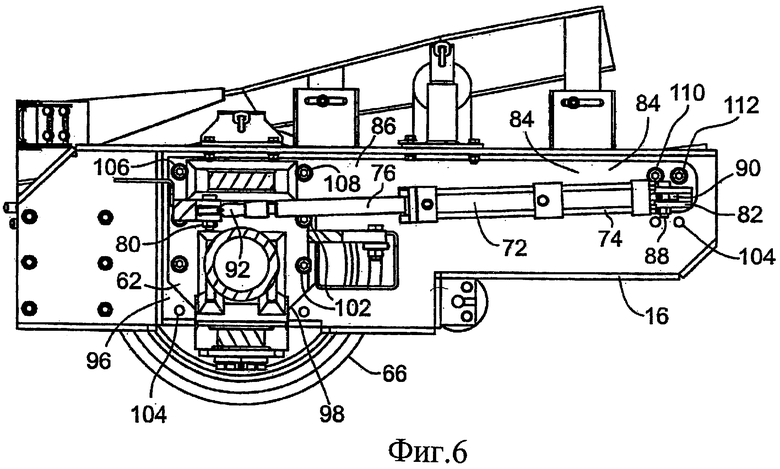
Фиг.6 представляет собой вид сбоку части устройства, взятое по линии VI-VI, показанной на Фиг.1, причем этот вид показывает детали механизма управления с усилителем для каждого колеса;
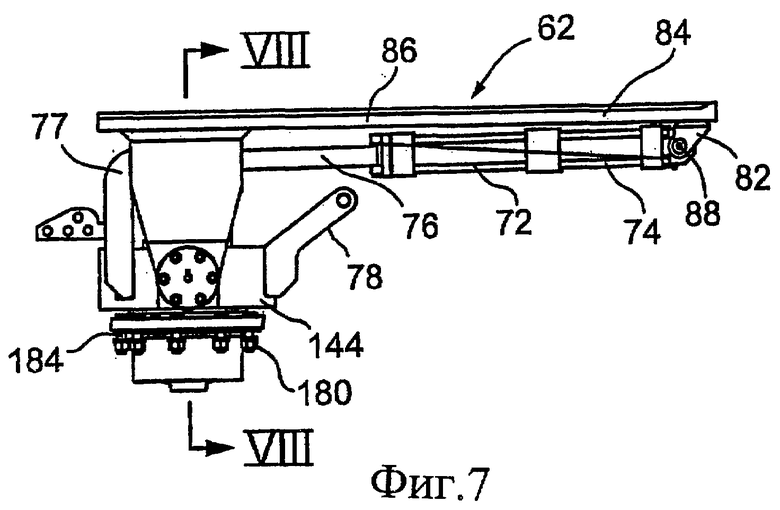
Фиг.7 представляет собой подробный вид сверху конструкции узла левого колеса транспортного средства, изображенного на Фиг.1 и 2, причем на этом виде само колесо не показано ради показа других деталей;
Фиг.8 представляет собой подробный разрез, взятый по линии VIII-VIII, показанной на Фиг.7;
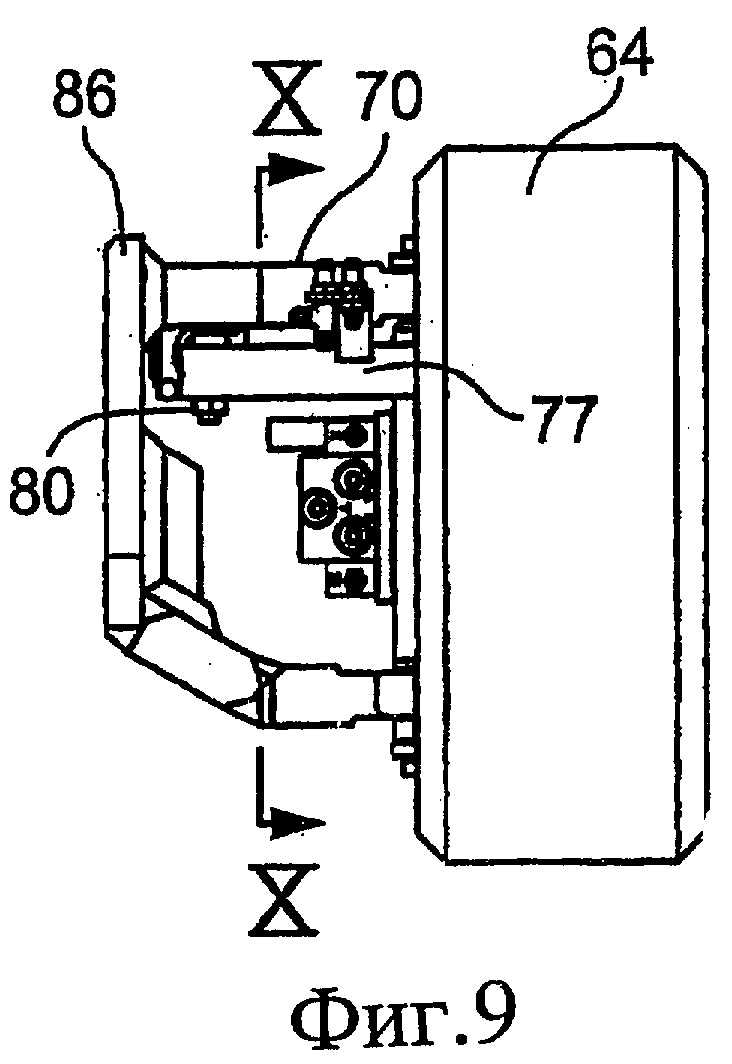
Фиг.9 представляет собой подробный вид с конца конструкции узла колеса, изображенной на Фиг.7, причем этот вид взят с левой стороны Фиг.7 и показывает колесо, установленное в этой конструкции;
Фиг.10 представляет собой подробный разрез, взятый по линии Х-Х, показанной на Фиг.9;
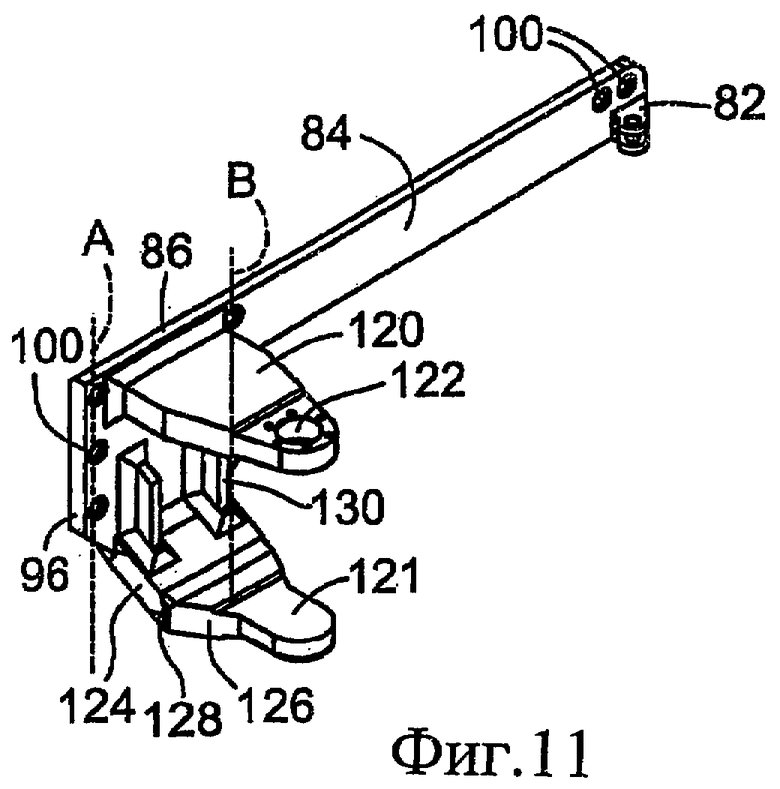
Фиг.11 представляет собой подробный вид в аксонометрии сварной монтажной пластины, используемой для опоры каждого колеса и его гидравлического двигателя;
Фиг.12 представляет собой подробный вид в аксонометрии, иллюстрирующий выполненный с возможностью поворота опорный элемент двигателя, установленный рядом с каждым колесом;
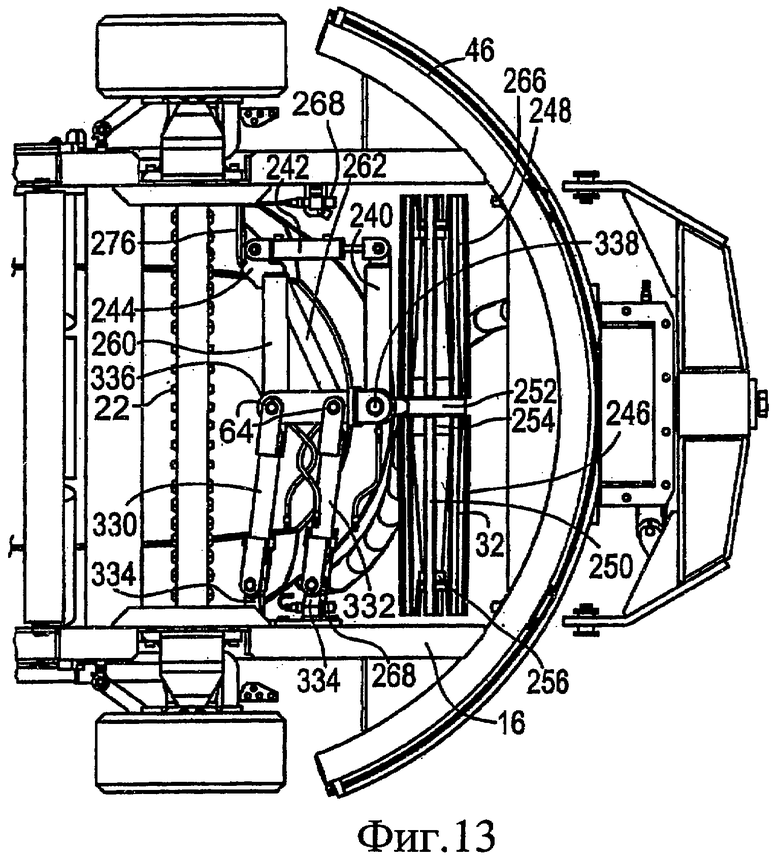
Фиг.13 представляет собой частичный вид снизу конвейерного механизма, иллюстрирующего конец, где установлен ведомый шкив;
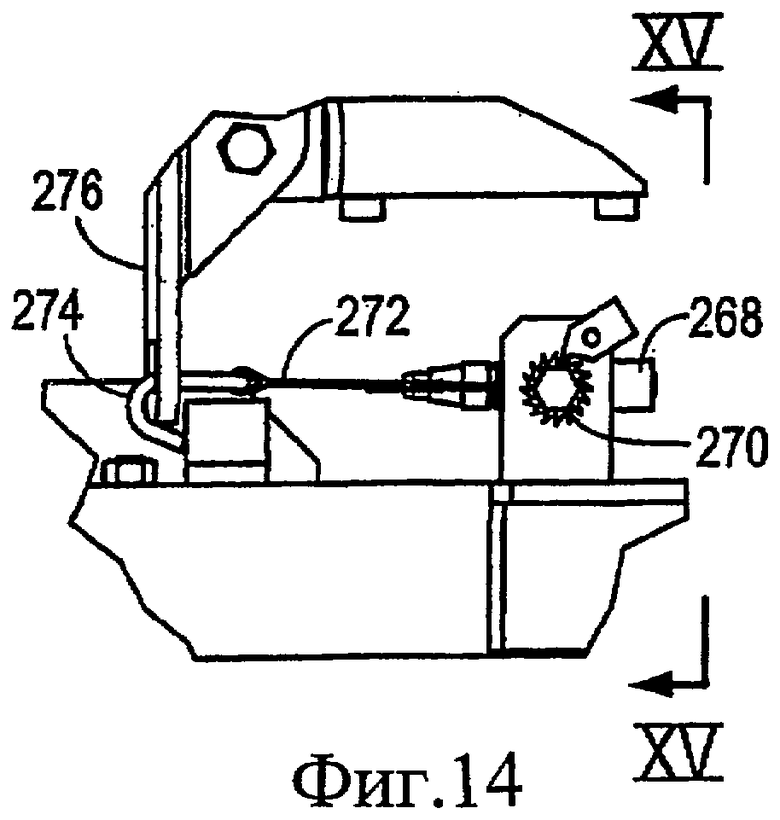
Фиг.14 представляет собой подробный вид отмеченной кругом области, обозначенной "Е" на Фиг.1;
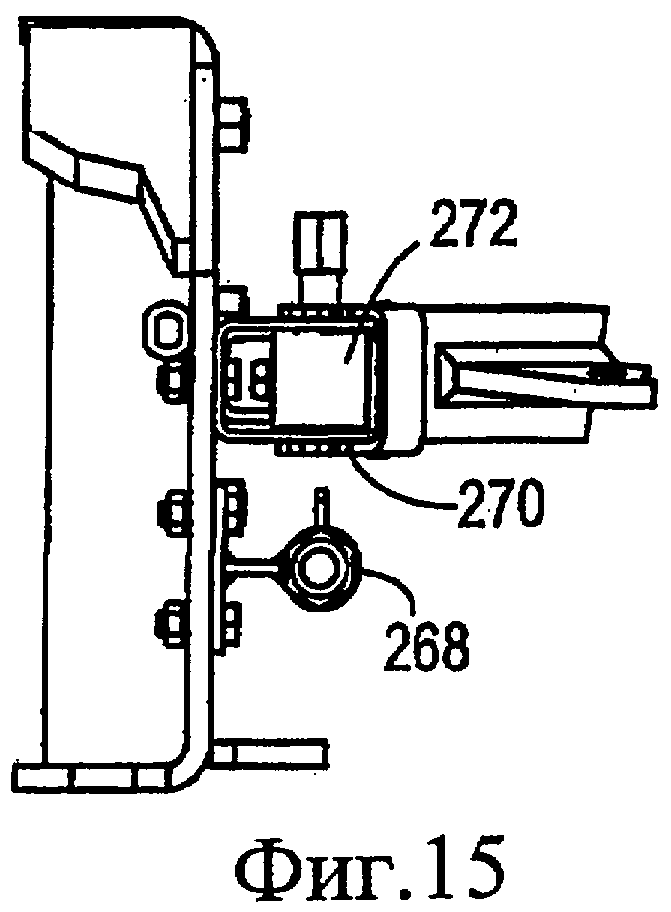
Фиг.15 представляет собой другой подробный вид, взятый по линии XV-XV, показанной на Фиг.14;
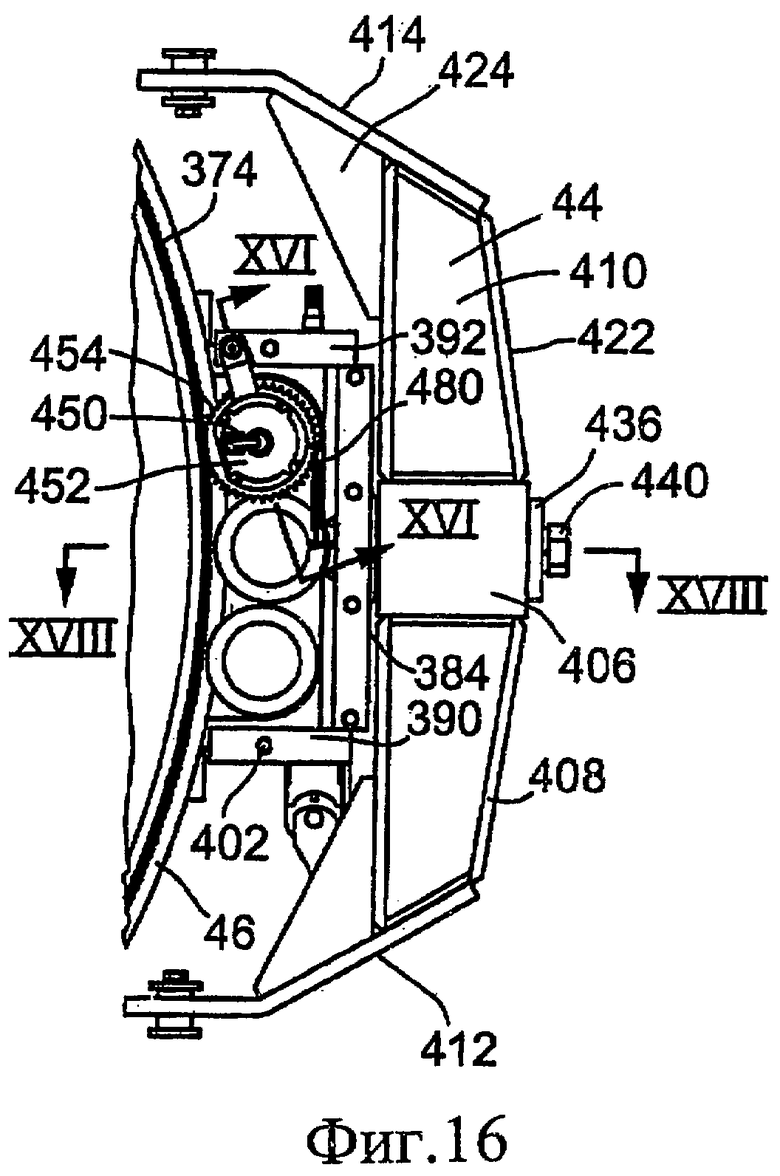
Фиг.16 представляет собой вид снизу, изображающий часть криволинейной направляющей и узел сцепки, установленный с возможностью движения качения по этой направляющей;
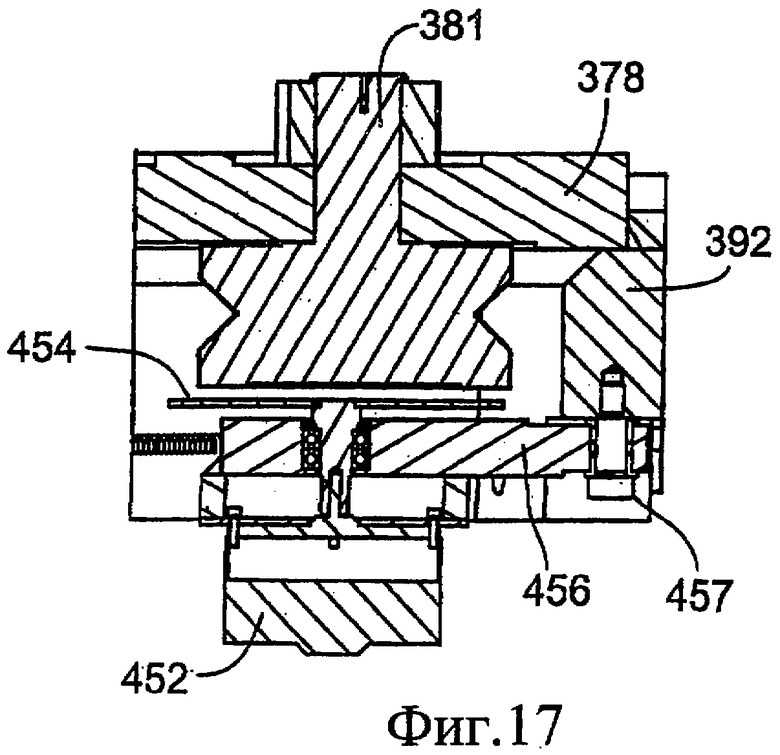
Фиг.17 представляет собой подробный вертикальный разрез, взятый по линии XVII-XVII, показанной на Фиг.16;
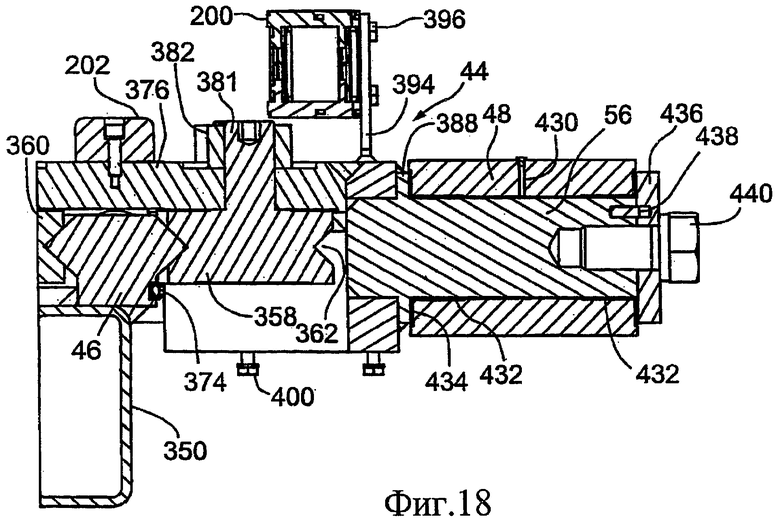
Фиг.18 представляет собой вертикальный разрез, взятый по линии XVIII-XVIII, показанной на Фиг.16, иллюстрирующий, как ролики взаимодействуют с направляющей;
Фиг.19 представляет собой подробный вид, изображающий поперечный разрез криволинейной направляющей в соответствии с иллюстративным вариантом выполнения;
Фиг.20 представляет собой вид сверху опорного корпуса установки ролика, который является частью узла сцепки;
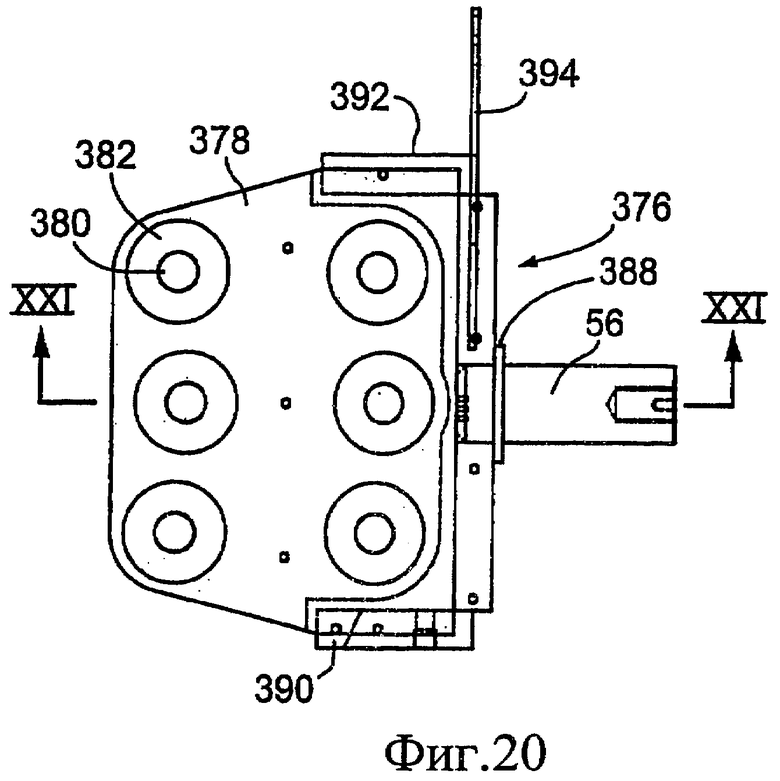
Фиг.21 представляет собой вертикальный разрез опорного корпуса установки ролика, взятый по линии XXI-XXI, показанной на Фиг.20;
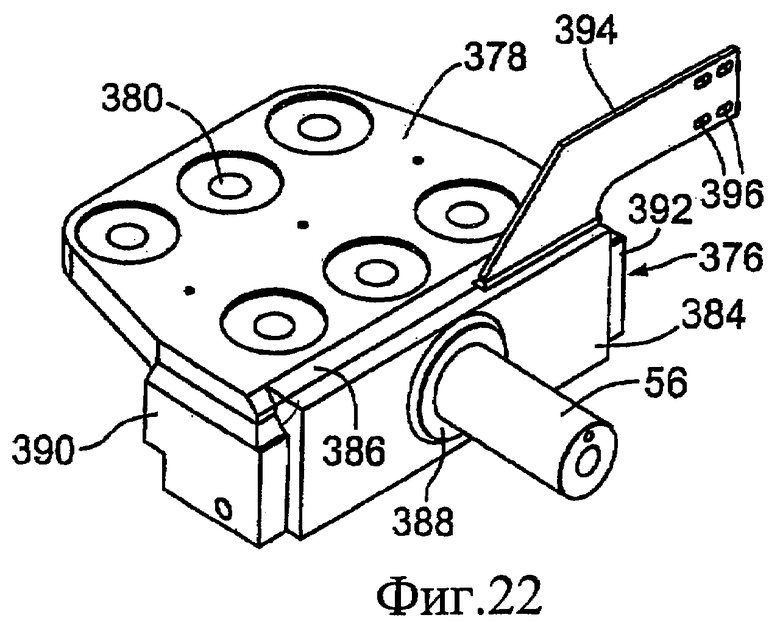
Фиг.22 представляет собой вид в аксонометрии опорного корпуса установки ролика, изображенного на Фиг.20, взятый сверху и от его конца шарнирного пальца;
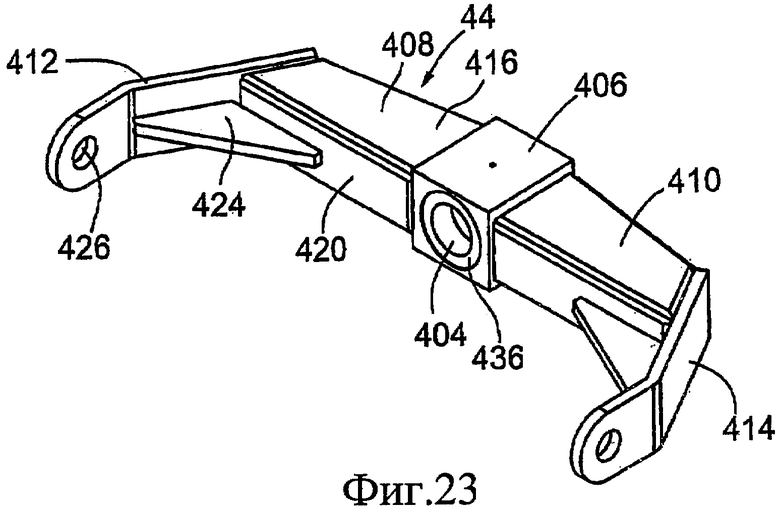
Фиг.23 представляет собой вид в аксонометрии конструкции поворотной сцепки, которая с возможностью поворота соединена с опорным корпусом, изображенным на Фиг.20, причем эта конструкция показана сверху и с ее внутренней стороны;
Фиг.24 представляет собой вид в аксонометрии конструкции датчика межвагонного угла, выполненной с возможностью установки на сцепное устройство;
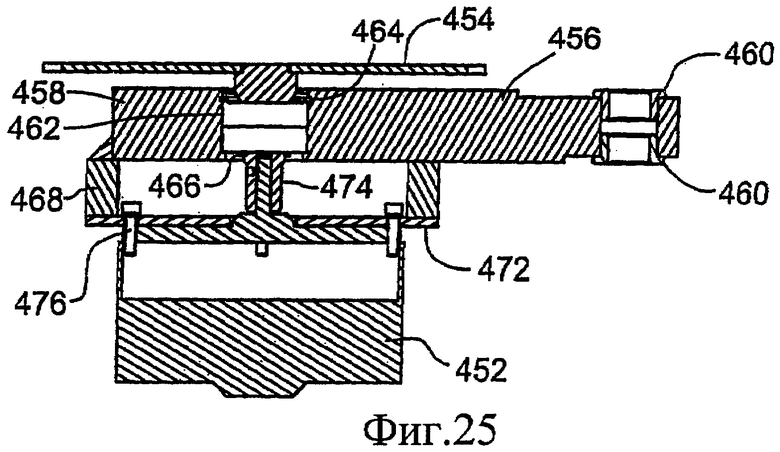
Фиг.25 представляет собой осевой разрез датчика, изображенного на Фиг.24;
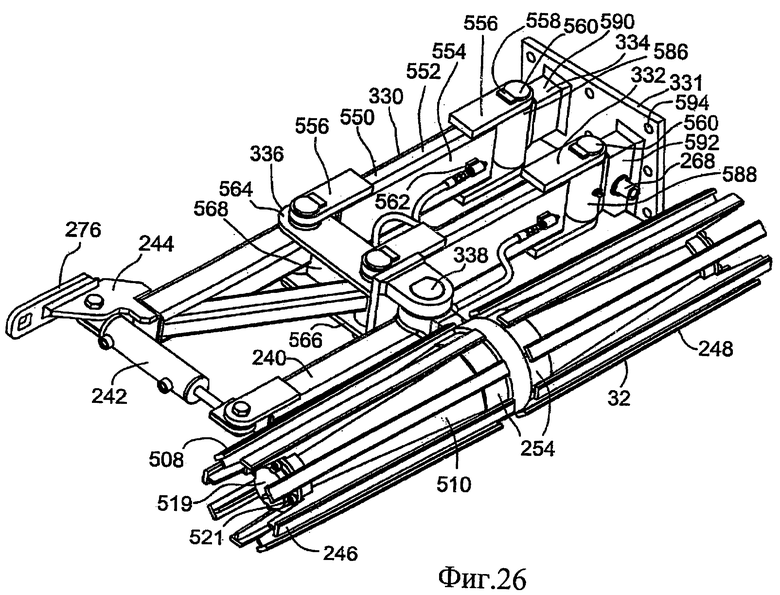
Фиг.26 представляет собой вид в аксонометрии, если смотреть сверху и со стороны штольни, изображающий механизм ведомого шкива и соединительный опорный механизм для установки ведомого шкива;
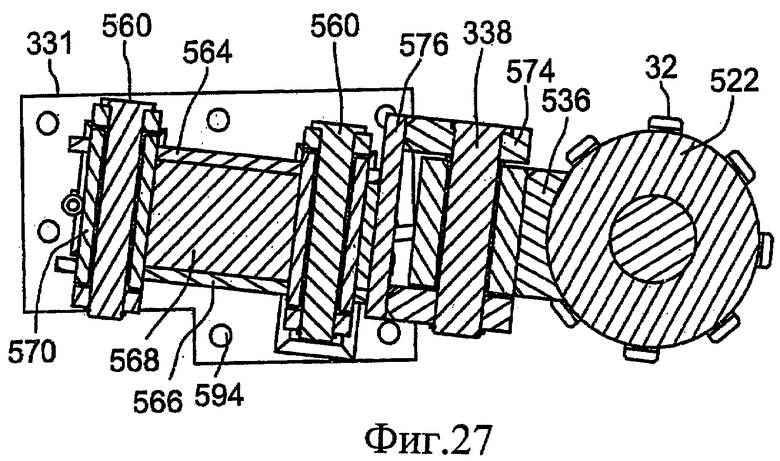
Фиг.27 представляет собой вертикальный разрез механизма ведомого шкива и соединительного опорного механизма, взятый по линии XXVII-XXVII, показанной на Фиг.29;
Фиг.28 представляет собой вид в аксонометрии элемента натяжного устройства ведомого шкива и элемента соединительного опорного механизма;
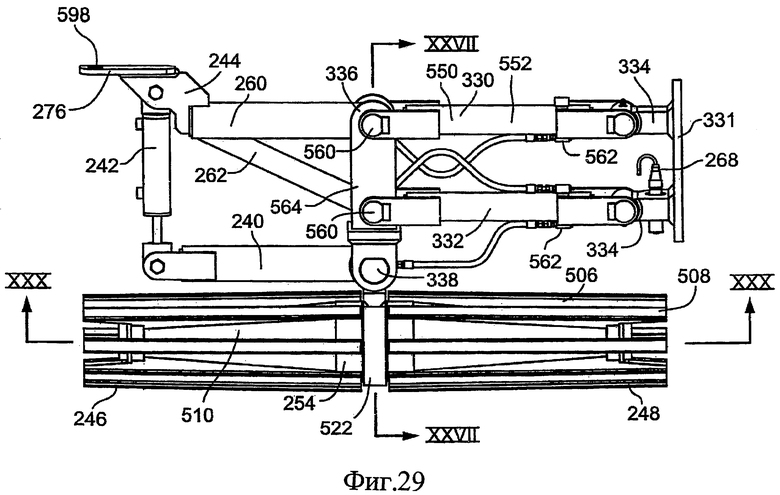
Фиг.29 представляет собой вид сверху механизма ведомого шкива и соединительного опорного механизма, показанных на Фиг.26;
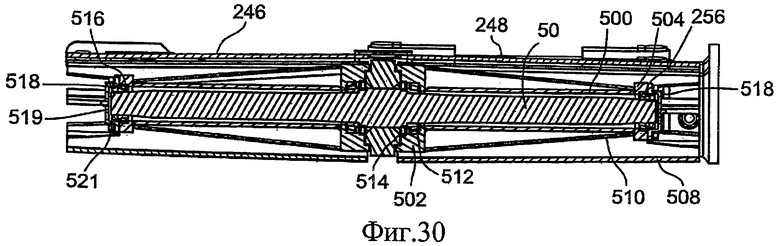
Фиг.30 представляет собой вертикальный разрез механизма ведомого шкива, включая опорный элемент шкива, причем это вид взят по линии XXX-XXX, показанной на Фиг.29;
Фиг.31 представляет собой вид в аксонометрии опорного элемента шкива и присоединенного к нему рычага управления конвейерной лентой;
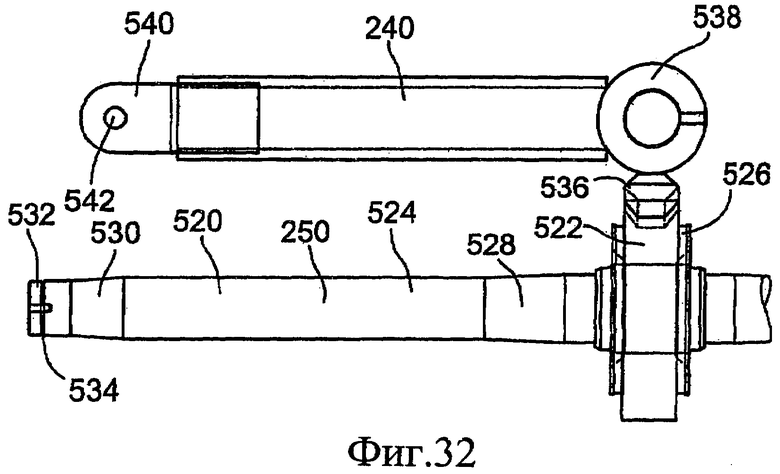
Фиг.32 представляет собой частичный вид сверху опорного элемента шкива и рычага управления конвейерной лентой, показанных нафиг.31, причем правая часть вала не показана, поскольку она выполнена так же, как и проиллюстрированная левая часть;
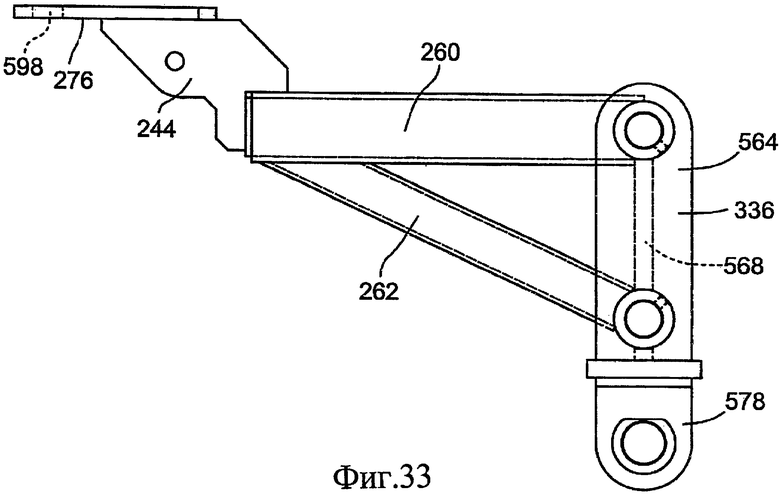
Фиг.33 представляет собой вид сверху элемента натяжного устройства ведомого шкива, изображенного на Фиг.28;
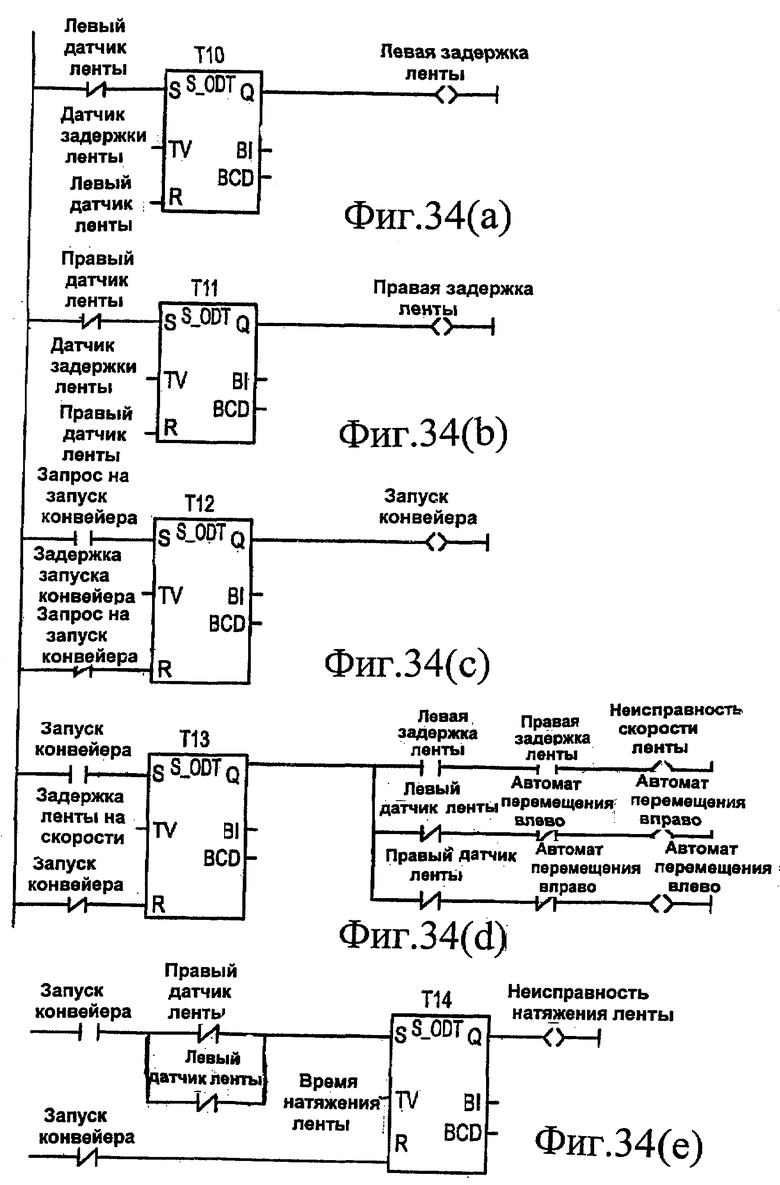
Фиг.34а-34е представляют собой ряд диаграмм, иллюстрирующих ПЛК программный файл для управления конвейером и системой протяжки конвейерной ленты;
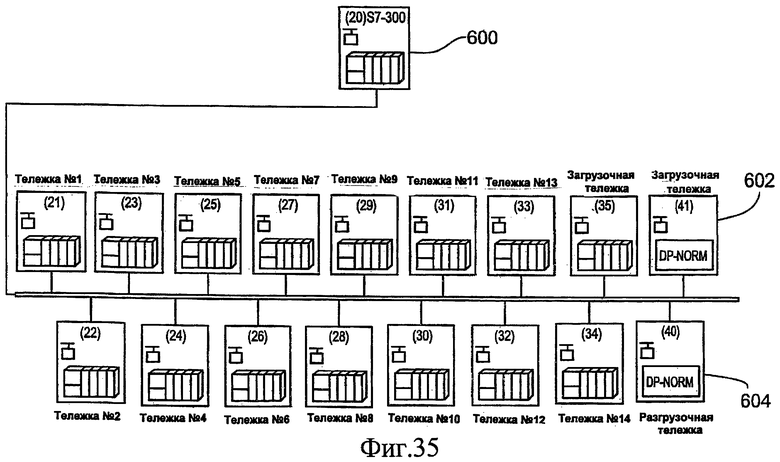
Фиг.35 представляет собой схематическую иллюстрацию сети программируемых логических контроллеров для состава подвижных конвейеров; и
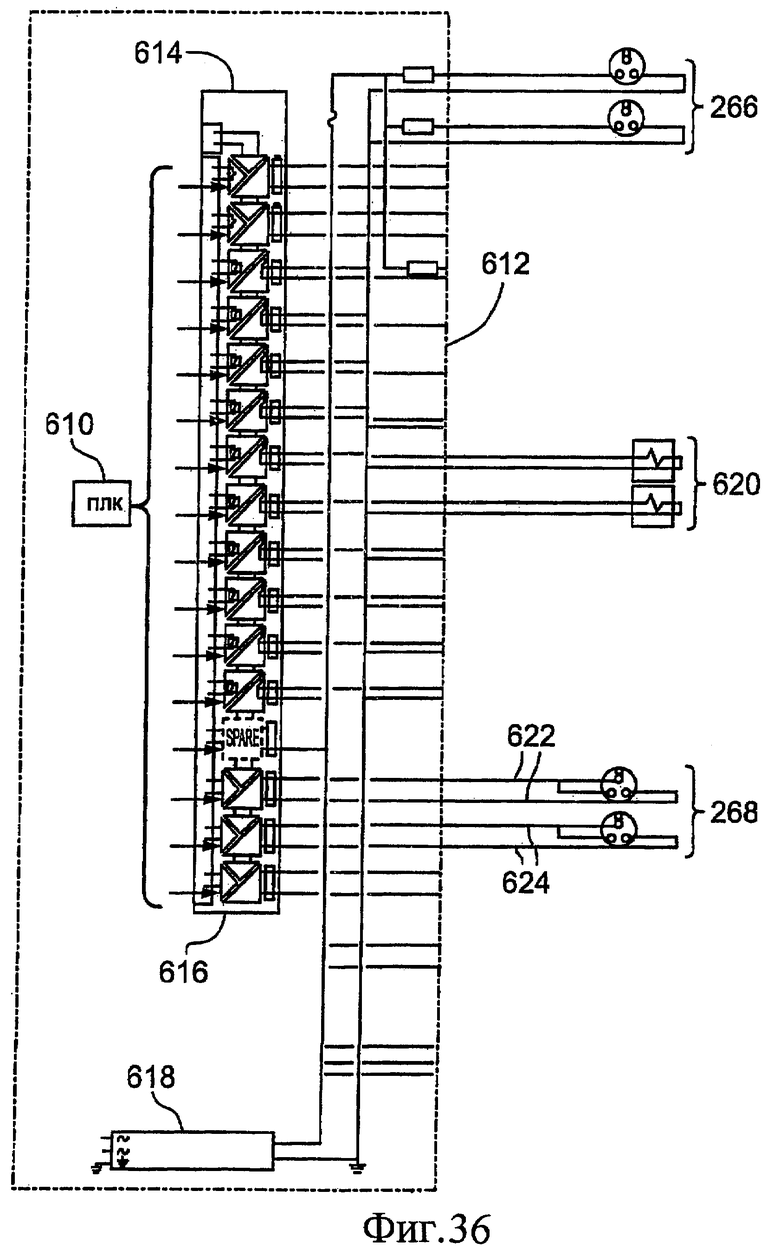
Фиг.36 представляет собой диаграмму электрической цепи, иллюстрирующей цепи, связанные с ПЛК, чтобы управлять конвейерной лентой и системой протяжки конвейерной ленты.
Конвейерное устройство, выполненное в соответствии с изобретением, проиллюстрировано на Фиг.1-5 чертежей. Изображенное низкопрофильное транспортное конвейерное средство 10 показано без обычной гибкой конвейерной ленты, местоположение которой только обозначено на Фиг.1 штриховой линией в целях иллюстрации. Эта конвейерная лента 12 представляет собой бесконечную ленту и может иметь стандартную конструкцию, в зависимости от типа материала, перемещаемого конвейерной системой. Изображенное иллюстративное конвейерное устройство представляет собой транспортное средство, предназначенное для использования в качестве промежуточной конвейерной тележки, которых может быть пять, десять или больше в составе транспортных конвейерных средств, как в составе, изображенном и описанном в патенте США № 5366059. Следует понимать, что в дополнение ко множеству промежуточных конвейерных транспортных средств, соединенных с возможностью поворота концами друг с другом, может также быть предусмотрено погрузочное конвейерное транспортное средство, которое расположено в конце состава, смежного с горнодобывающим механизмом, а также разгрузочное конвейерное транспортное средство, расположенное в противоположном конце состава, который в настоящем описании называется концом на дальнем от забоя конце, то есть конце, к которому состав транспортных средств доставляет материал. Конструкция погрузочных тележек может быть выполнена аналогичным проиллюстрированной конструкции 10 промежуточных тележек образом, за исключением того, что не нужно выполнять механизм сцепки на ближнем к забою конце или конце бункера, поскольку нет никакой потребности в прикреплении этого конца к другому транспортному конвейерному средству. Что касается разгрузочного конвейерного транспортного средства, оно снабжено двумя парами поперечно совмещенных колесных узлов, а не одной единственной парой этих колесных узлов, описанных в дальнейшем. Однако колесные узлы на разгрузочной тележке могут быть выполнены тем же самым образом, как описано в дальнейшем, включая их механизм управления и их гидравлический приводной механизм. На разгрузочной тележке также предусмотрен выполненный с возможностью поворота поперечный конвейер, предназначенный для разгрузки материала на стационарный или неподвижный конвейер в месторождении. Поперечный конвейер и его применение описаны и проиллюстрированы в патенте США № 5366059. Заявитель посчитал ненужным приводить в настоящем описании детальное описание разгрузочной тележки и ее поперечного конвейера, поскольку система поперечного конвейера не является аспектом заявляемого здесь изобретения.
Обращаясь теперь к проиллюстрированному конвейерному устройству 10, это устройство содержит конвейерный механизм 14, который содержит удлиненную, по существу, горизонтальную раму 16 и опорные устройства конвейерной ленты, которые, как проиллюстрировано, содержат расположенные на расстоянии друг от друга транспортирующие ролики 18, установленные на горизонтальной раме 16 и выполненные с возможностью поддержания с возможностью вращения верхней ветви непрерывной конвейерной ленты 12, проходящей между противоположными концевыми секциями транспортного средства. Ролики 18 могут иметь стандартную конструкцию, имеющуюся в наличии у поставщиков запчастей конвейера. Каждый проиллюстрированный ролик включает три металлических ролика 20, которые соединены вместе встык с возможностью поворота посредством их центральных валов. Наружный конец каждого наружного ролика соединен цепью 22 (см. Фиг.5) с вертикальной опорной стойкой 24, установленной на основном проходящем в длину рамном элементе основной рамы 16. Высота каждой пары стоек 24 изменяется, как показано, чтобы постепенно увеличить высоту роликов. В дополнение к цилиндрическим выполненным с возможностью вращения металлическим роликам 20 могут также быть предусмотрены ударопрочные ролики 26 известной конструкции, расположенные под бункерным элементом 28 U-образной формы. Следует понимать, что ударопрочный ролик помогает поглотить удар от материала, падающего в этом месте на конвейерную ленту.
Опорные устройства для конвейерной ленты содержат механизм ведомого шкива, выполненный с возможностью изменения направления поворота конвейерной ленты на обратное, установленный рядом с одним концом конвейерного механизма на горизонтальной раме 16 и имеющий выполненный с возможностью вращения ведомый шкив, обозначенный номером позиции 32. Дальнейшие детали конструкции узла ведомого шкива приведены ниже со ссылкой на Фиг.5, 13-15 и 26-33. Конвейерный механизм 14 также содержит узел 34 ведущего шкива, установленного рядом со вторым концом конвейерного механизма напротив первого конца, где расположен ведомый шкив. Узел ведущего шкива содержит выполненный с возможностью вращения ведущий шкив 36, который, известным образом, может быть снабжен захватываемой цилиндрической поверхностью, которая обеспечивает приведение в действие ленты 12 посредством узла ведущего шкива. Также предусмотрен электродвигатель 38, который можно считать частью узла ведущего шкива, поскольку он вращает ведущий шкив 36, чтобы перемещать конвейерную ленту и тем самым транспортировать материал от ведомого шкива к ведущему шкиву. Рядом с ведущим шкивом может быть установлен скреппер 40 конвейерной ленты известной конструкции, предназначенный для поддержания передающей поверхности ленты чистой. Установленный рядом с ведущим шкивом на дальнем от забоя конце транспортного средства бункер 42 для материала помогает направлять материал на конвейерную ленту следующего конвейерного транспортного средства состава. Также на ближнем к забою конце транспортного средства может быть предусмотрен поворотный механизм 44 сцепки. Этот механизм сцепки может содержать криволинейную стальную направляющую и сцепку 48 качения, имеющую два набора снабженных желобком роликов 50 и 52, расположенных на двух противоположных V-образных сторонах направляющей 46. Два пальца 54 сцепки тележки расположены на противоположных сторонах сцепки 48, которая выполнена с возможностью поворота вокруг центральной продольной оси транспортного средства посредством центрального шарнирного пальца 56 (см. Фиг.18). Также предусмотрены два держателя 60 пальца сцепки, расположенные около противоположного конца ведущего шкива тележки, по одному на каждой стороне рамы 16.
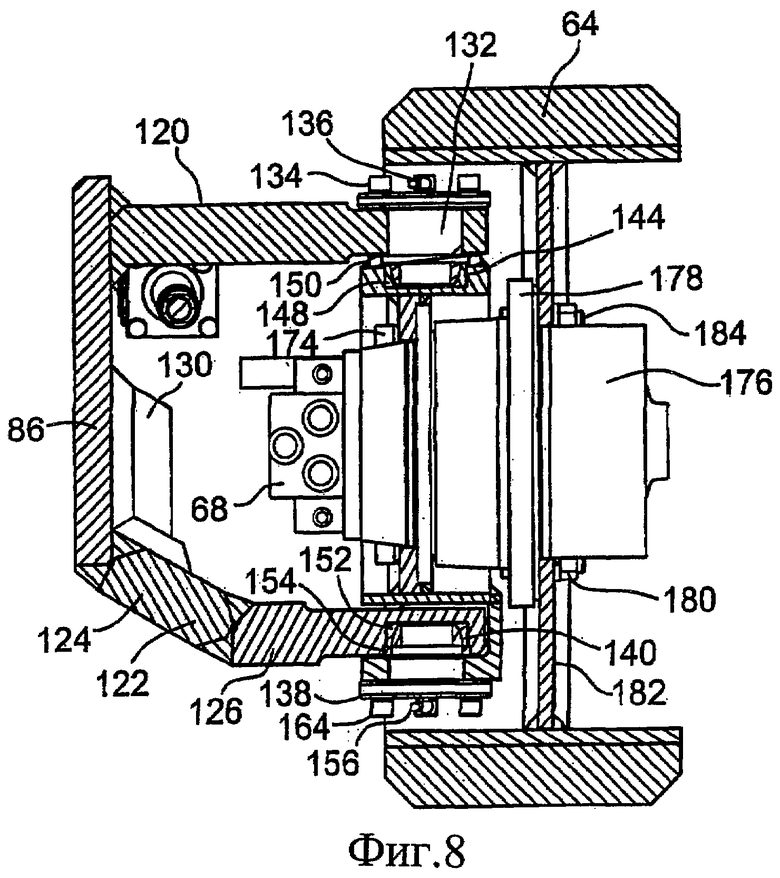
Транспортное средство 10 имеет пару совмещенных в поперечном направлении колесных узлов, обозначенных в целом номером позиции 62, предназначенных для поддержки и перемещения конвейерного транспортного средства. Каждый из этих колесных узлов по отдельности присоединен к горизонтальной раме 16. Конкретнее, каждый колесный узел присоединен к соответствующей проходящей в длину стороне рамы. Каждый колесный узел имеет свое собственное массивное колесо, причем колесо на левой стороне обозначено номером позиции 64, а колесо на правой стороне обозначено номером позиции 66. Как объяснено более подробно далее, каждое колесо 64, 66 установлено с возможностью поворотного перемещения вокруг, по существу, вертикальной оси поворота с целью рулевого управления, то есть управления транспортным средством 10. В иллюстративном варианте выполнения транспортного средства каждый колесный узел содержит стандартный гидравлический двигатель 68, четко показанный на Фиг.8. Этот двигатель используется для вращения или приведения в действие колеса соответствующего колесного узла. Кроме того, каждый колесный узел содержит невращающуюся опорную конструкцию, обозначенную в целом номером позиции 70 и предназначенную для присоединения колесного узла к горизонтальной раме с возможностью отсоединения. Левосторонний колесный узел 62, с удаленным колесом, проиллюстрирован на Фиг.7, а с колесом, поставленным на место, проиллюстрирован на Фиг.8 и 9. На Фиг.7 также изображен механизм управления с усилителем, или средство 72 управления с усилителем, для того, чтобы управлять колесом этого колесного узла. Проиллюстрированный механизм управления с усилителем содержит гидравлический возвратно-поступательный привод, имеющий гидравлический цилиндр 74 и приводную тягу 76, выполненную с возможностью скольжения в цилиндре. Управляющий рычаг 77, имеющий L-образную форму, прочно прикреплен на одном конце к верхней части опорного элемента 144 двигателя (см. Фиг.12), а на другом его конце с возможностью поворота присоединен к тяге 76 с помощью болта и гайки 80 (см. Фиг.9). Закрытый конец цилиндра 74 установлен с возможностью поворота посредством хомутов 82 на конце горизонтально проходящего вытянутого кронштейна 84, который является частью монтажной пластины 86 колесного узла. Комбинация 88 гайки и болта с возможностью поворота соединяет короткую соединительную пластину 90, которая прочно прикреплена на конце цилиндра к хомутам 82. На тяге 76 привода может также быть предусмотрен сферический подшипник 92, который соединен резьбой с наружным концом тяги. Этот подшипник присоединен к рычагу 77 гайкой и болтом 80.
В дополнение к кронштейну 84 плоская монтажная пластина 86 содержит основную часть 96, показанную на Фиг.6. Эта основная часть пластины имеет в целом прямоугольную форму, за исключением вырезанных нижних уголков 98. Кронштейн 84 проходит горизонтально от верхнего угла основной части 96 пластины. Преимущество, обеспечиваемое кронштейном 84, заключается в том, что гидравлический цилиндр может тогда быть с возможностью поворота установлен на той же самой монтажной пластине 86, что и колесо, и его гидравлические двигатели 68. Как можно видеть из Фиг.6 и 11, каждый колесный узел 62, и в особенности его монтажная пластина 86 (которая является частью несущей конструкции колеса), выполнен с проемами или отверстиями, обозначенными в целом номером позиции 100, которые предназначены для размещения крепежных средств, предпочтительно болтов, используемых для крепления соответствующего колесного узла к раме 16. Крепежные средства 102 с этой целью выполнены с возможностью введения через отделенные друг от друга отверстия 104, четыре из которых можно видеть на Фиг.6. Имеются отверстия 104, выполненные в каждой из проходящих в длину боковых сторон рамы 16, а также, дополнительно, могут быть предусмотрены дополнительные отверстия в выдвижных пластинах, выполненных с возможностью прикрепления к элементам основной рамы. Отверстия 100, выполненные в монтажной пластине 86, расположены в противоположных концах монтажной пластины, как ясно показано на Фиг.11. Проиллюстрированное расположение отверстий обеспечивает регулировку каждого колесного узла относительно горизонтальной рамы 16 между одним из двух из возможных положений, но специалистам при этом должно быть понятно, что путем выполнения дополнительных отверстий 104, например, на каждом продольном элементе рамы или выдвижной пластине, можно предусмотреть более двух возможных положений по высоте для каждого колесного узла. В положении колесного узла, изображенного на Фиг.6, колесный узел 62 расположен на своей максимальной высоте относительно рамы 16. В этом положении полная высота конвейерного транспортного средства будет минимальной высотой, которая в иллюстративном варианте выполнения составляет только четыре фута, или сорок восемь дюймов (один метр двадцать один сантиметр), по сравнению с известными конвейерными транспортными средствами, такими как описаны и проиллюстрированы в патенте США № 5366059, которые имеют полную высоту, равную шести футам или семидесяти двум дюймам (один метр восемьдесят один с половиной сантиметров). В этом положении колесного узла в иллюстративном варианте выполнения дорожный просвет, обеспечиваемый под транспортным средством, составляет шесть дюймов (пятнадцать сантиметров).
Обращаясь теперь к описанию несущей конструкции 70 колеса, показанной на Фиг.8 и 11, видно, что конструкция 70 содержит верхний и нижний проходящие горизонтально опорные кронштейны 120, 122 для колес, причем оба они имеют закругленный дистальный конец. Верхний кронштейн 120 может быть выполнен из цельной стальной пластины, приваренной к вершине монтажной пластины 86, и иметь круглое отверстие 122 для введения верхнего шарнирного пальца. Как проиллюстрировано, нижний опорный кронштейн 122 может быть выполнен из двух коротких пластинчатых элементов 124, 126, которые приварены вместе в точке 128 и которые расходятся под тупым углом друг от друга, как показано на Фиг.8. Прочность и жесткость соединения между скошенной пластиной 124 и пластиной 86 может быть усилена двумя вертикально проходящими клиньями 130, которые приварены к этим пластинам. Верхний шарнирный палец 132 установлен в отверстии 122 и соединен с верхним кронштейном 120 шестью винтами 134. В шарнирном пальце может быть предусмотрен центральный проход (не показан), который проходит вниз от масленки 136 Зерка. Также предусмотрен нижний шарнирный палец 138, имеющий уменьшенный верхний конец, проходящий в круглую выемку 140, выполненную в закругленной концевой части нижнего опорного кронштейна 122.
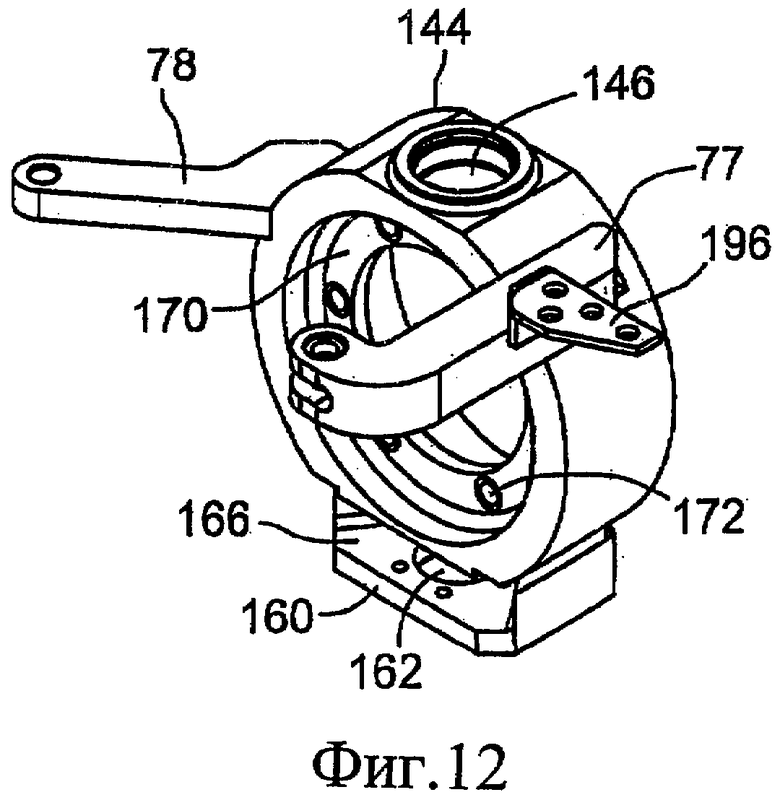
Для поддержания колеса с возможностью поворота, а также и его гидравлического двигателя 68, предусмотрен, по существу, кольцевой опорный элемент 144 двигателя, изображенный на Фиг.12. Этот опорный элемент имеет круглую выемку 146, выполненную на его верхней стороне, причем в эту выемку проходит часть нижнего конца уменьшенного размера верхнего шарнирного пальца 132. Установленный в этой выемке сферический радиально-упорный подшипник 148, который в одном варианте выполнения имеет отверстие, имеющее размеры 1% дюйма (4,45 сантиметра), и имеет внешний диаметр 1ѕ дюйма (7,15 сантиметра). Подходящее уплотнение, такое как уплотнение 150 Chesterton Super Wiper, защищает этот подшипник и проходит вокруг его верхнего края. Аналогично, вокруг уменьшенной верхней части нижнего шарнирного пальца проходит сферический радиально-упорный подшипник 152, который загерметизирован посредством уплотнения 154 Chesterton Super Wiper. Нижний шарнирный палец может смазываться посредством масленки 156 Зерка.
Возвращаясь к Фиг.12, можно заметить, что опорный элемент 144 двигателя имеет нижнюю выступающую часть 160, которая приварена к кольцевой части опорного элемента 144 и у которой имеется круглое отверстие 162. Нижний шарнирный палец проходит насквозь через отверстие 162 из основания и присоединен с возможностью отсоединения к выступающей части 160 шестью винтами 164, которые проходят через фланец, проходящий вокруг основания этого шарнирного пальца. Между выступающей частью 160 и кольцевой частью опорного элемента 144 выполнено углубление 166, в которое вставлена закругленная концевая часть горизонтальной плиты 126. Таким образом, элемент 144 с возможностью поворота поддерживается снизу.
Из Фиг.12 также можно видеть, что опорный элемент 144 имеет проходящий радиально внутрь соединительный выступ 170, причем этот выступ выполнен с рядом соединительных отверстий 172. Как показано на Фиг.10, шесть винтов 174 могут быть использованы для прикрепления гидравлического двигателя 68 к выступу 170 вместе с сопутствующей планетарной коробкой 176 передач. Планетарная коробка передач имеет кольцевой фланец 178 вращения, который прикреплен девятью шестигранными гайками 180 к круглой пластине 182, образуя центральную часть втулки колеса. Гайки навинчены на стойки 184, которые видны на Фиг.7, причем эти стойки проходят через фланец вращения на коробке передач. Подразумевается, что левые и правые колеса 64, 66 выполнены из твердой резины и, в одном варианте выполнения, каждое колесо имеет размеры 10''×24'' (25 см × 61 см) в диаметре. Левое и правое колеса 64, 66 соединены поперечной рулевой тягой 190, показанной на Фиг.4, которая гарантирует, что колеса поворачиваются одновременно в одну и ту же сторону. Эта тяга присоединена в каждом конце к стержню 78 поперечной рулевой тяги соответствующего колеса посредством болта и контргайки 192 с нейлонной вставкой.
Следует понимать, что гидравлический двигатель для каждого колесного узла снабжен гидравлической жидкостью под давлением через гидравлические линии и соединительными патрубками стандартной конструкции, которые доступны от производителя и известны в уровне техники. Большинство этих линий не показаны для простоты иллюстрации. Некоторые из этих линий обозначены номером позиции 194 на Фиг.10. Соединительные патрубки для этих линий могут поддерживаться небольшим кронштейном 196, показанным на Фиг.12. Следует понимать, что сам гидравлический двигатель и его коробка передач имеют стандартную конструкцию и, соответственно, их подробное описание считается ненужным.
Различные другие признаки в иллюстративном низкопрофильном конвейерном транспортном средстве, которое изображено на Фиг.1-3, включают пластмассовый энергетический канал 200, через который подаются электрические кабели и провода для работы транспортного средства, и направляющую 202 энергетического канала, которая способствует поддержанию его перемещения. На левой стороне конструкции установлена распределительная коробка 204 электропитания стандартной конструкции, причем эта коробка имеет дверцу 206, предназначенную для доступа. На той же самой стороне рамы установлен электродвигатель 208, который запитывает первый и второй гидравлические насосы 210 и 212, из которых первый насос 210 обычно используется для приведения в действие гидравлических двигателей для колес, и второй двигатель 212 обычно используется для приведения в действие других гидравлических элементов на транспортном средстве. На правой стороне транспортного средства в месте 214 предусмотрены два стандартных фильтра для гидравлической системы. Выше этих фильтров установлена соединительная коробка 116. Третий гидравлический фильтр может быть предусмотрен в месте 218 рядом с насосом 212. На двух продольных основных рамах рамы 16 или между ними и рядом с одной из поперечных рам 220 предусмотрен резервуар 222 для гидравлической жидкости. Другая соединительная коробка для электрических элементов, включая соединители, предусмотрена на правой стороне в месте 224. Установленный сбоку электрический двигатель 38 для ведущего шкива соединен с коробкой 226 передач конвейера, которая имеет выходной вал, соединенный с валом ведущего шкива. В одном варианте выполнения двигатель 38 представляет собой 7,5-киловатный (или 10 л.с.) двигатель. Также на правой стороне транспортного средства на продольной раме установлен коллектор 230 гидравлического узла, который защищен кожухом или протектором 232. С другой стороны рамы около двигателя 38 имеется пульт управления, содержащий программируемый логический контроллер для управления работой и рулевого управления транспортного средства, причем коробка обозначена номером позиции 234. Известным образом, транспортное средство 10 может также быть снабжено распылителями воды, два из которых обозначены номерами позиции 240, 242. Водяные шланги (не показаны) присоединены к распылителям, чтобы уменьшить уровни пыли, создаваемые конвейерной системой.
Фиг.13 и 16 изображают поворотный механизм или поворотный сцепной механизм 44, предназначенный для соединения с возможностью поворота подвижного конвейерного механизма, изображенного на Фиг.1 и 2, на его ближнем к забою конце (также иногда упомянутым в этом документе как первый конец механизма) к смежной концевой секции другого подвижного конвейерного механизма, который может быть выполнен тем же самым образом, что и механизм или транспортное средство, изображенное на Фиг.1 и 2. Как было отмечено выше, этот поворотный механизм содержит криволинейную направляющую 46, которая может иметь однородное поперечное сечение и, в иллюстративной версии, имеет поперечное сечение, проиллюстрированное выше на Фиг.14. Криволинейная направляющая согнута в форме горизонтальной круговой дуги, как ясно показано, например, на Фиг.5, причем эта дуга имеет центр кривизны, расположенный на полпути между движущими устройствами, которыми являются колеса 64, 66. Этот центр кривизны обозначен буквой С на Фиг.3 и 4. Центр кривизны лежит на общей оси вращения двух колес, когда эти два колеса размещены для перемещения конвейерного механизма в прямом направлении. Эта ось вращения обозначена буквой А на Фиг.3. Направляющая прочно установлена на опорной раме 16, которая включает криволинейную раму 350 бампера, имеющую прямоугольное поперечное сечение, причем эта рама проходит по всей длине направляющей. Направляющая, которая предпочтительно изготовлена из обработанной твердой стали, может быть приварена к раме бампера. Каждый конец направляющей может быть снабжен прямоугольной стопорной пластиной 352, прикрепленной к месту винтами, завинченными в отверстия, выполненные на каждом конце направляющей. Иллюстративная форма направляющей имеет поперечное сечение, показанное на Фиг.19, Направляющая имеет два противоположных ролика, взаимодействующих со сторонами 354, 356, причем сторона 354 находится на внутренней стороне направляющей и образует вогнутую кривую, а сторона 356 находится на внешней стороне и образует выпуклую кривую. Каждая из этих сторон в иллюстративной версии взаимодействует с тремя роликами, причем один из этих роликов, взаимодействующий со стороной 356, изображен в поперечном сечении в месте 358 на Фиг.18. Другой ролик 360 изображен частично на Фиг.18, причем он является одним из тех трех роликов, которые взаимодействуют со стороной 354. Три ролика, взаимодействующие со стороной 356, образуют первый набор роликов, а три ролика, взаимодействующие со стороной 354, образуют второй набор роликов. Следует отметить, что направляющая 46 захватывается и удерживается между первым и вторым набором роликов. Ролики обоих наборов имеют V-образные канавки 362, выполненные по их окружности. Использование трех роликов в каждом наборе помогает всегда удерживать узел сцепки правильно ориентированным на направляющей.
Обращаясь теперь к иллюстративному поперечному сечению, изображенному на Фиг.19, наружная, выпуклая сторона 356, которая обращена к смежному концу подвижного конвейерного механизма, имеет верхнюю скошенную поверхность 364, которая проходит под углом в 45 градусов к вертикальной средней линии Z направляющей. На наружной поверхности также имеется нижняя скошенная поверхность 366, которая проходит под углом в 45 градусов к оси Z, при этом может быть предусмотрена короткая вертикальная поверхность, выполненная в месте 368. Сторона 354, взаимодействующая с внутренними роликами, также имеет скошенные поверхности 370 и 372, образующие углы в 45 градусов. Эти поверхности могут быть изготовлены стандартным процессом механической обработки. Также в направляющей выполнена прямоугольная канавка 372, которая может увеличивать длину элемента направляющей на стороне 356. Назначение этой канавки состоит в том, чтобы вместить длину цепи 374 ролика, используемой совместно с датчиком угла, описанным далее.
Что касается конструкции опорного корпуса 376 крепления ролика, проиллюстрированного на Фиг.20-22, этот корпус используется для поддержки с возможностью вращения двух вышеупомянутых рядов роликов, которые взаимодействуют с направляющей 46. Этот корпус содержит проходящую горизонтально опорную пластину 378, которая может иметь в целом трапециевидную форму и выполнена с шестью круглыми отверстиями 380, в которые вставлены проходящие вверх валы 381 роликов. При необходимости вокруг каждого отверстия может быть сформирована неглубокая круглая выемка 382, чтобы частично поместить в нее гайку 382, которую навинчивают на вал ролика с помощью подходящей резьбы (не показана). Каждый узел ролика представляет собой стандартный ролик и, поэтому, не изображен подробно. Короткий вал 380 проходит вовнутрь и поддерживает ролик. Опорный корпус также имеет вертикальную опорную пластину 384 шарнирного пальца, которая прочно соединена с краем опорной пластины 378 ролика. Эти две пластины могут быть приварены вместе в месте, обозначенном номером позиции 386. Проходящий горизонтально центральный шарнирный палец 56 установлен в круглом отверстии, выполненном по центру в опорной пластине 384. Палец 56 имеет проходящий по окружности фланец 388 вблизи его внутреннего конца, причем этот фланец опирается на опорную пластину 384. Внутренний конец шарнирного пальца может быть приварен к пластине 384. Чтобы усилить опорный корпус 376, к местам, обозначенным номерами позиций 390 и 392, могут быть приварены две прямоугольные боковые пластины. Опорная плита 394 может быть приварена к верхнему краю пластины 384 и выполнена так, чтобы образовывать тупой угол. Четыре крепежных отверстия 396 могут быть выполнены в наружном конце этой опорной пластины. Кронштейн 394 используется для соединения с возможностью отсоединения одного конца вышеупомянутого энергетического канала 200. При необходимости к основанию опорного корпуса 376 может быть присоединена закрывающая пластина 395 (см. Фиг.3) посредством винтов 400, вставленных через пластину и навинченных на резьбу в отверстиях 402. Следует понимать, что на каждом ролике предусмотрены внутренние подшипники стандартной конструкции.
Обращаясь теперь к конструкции механизма поворотной сцепки или рамы 44 сцепки, проиллюстрированной отдельно на Фиг.23, видно, что эта рама с возможностью поворота соединена с опорным корпусом 376 посредством шарнирного пальца 56. Шарнирный палец проходит в шарнирный канал, который сформирован в поперечном центре рамы. Следует понимать, что канал 404, имеющий круглое поперечное сечение, проходит в радиальном направлении относительно радиуса направляющей 46. Рама сцепки содержит центральный блок 406, в котором выполнен канал, две трубчатые части 408, 410 кронштейна и две концевые части 412, 414, расположенных на противоположных сторонах шарнирного пальца и отделенных от него, причем эти концевые части выполнены с возможностью шарнирного присоединения к смежной концевой части второго или другого подвижного механизма (аналогичного или такого же, как механизм, проиллюстрированный на Фиг.1 и 2) во время использования сцепного устройства. Каждая часть 408, 410 кронштейна может быть выполнена из горизонтальной верхней пластины 416, аналогичной ей горизонтальной нижней пластины 418, внутренней прямоугольной пластины 420 и прямоугольной вертикальной наружной пластины 422 (см. Фиг.5). Эти пластины могут быть изготовлены из стальной пластины толщиной 3/4 дюйма (19 мм) и могут быть жестко соединены посредством сварки. Каждая концевая часть 412, 414 может быть выполнена из согнутой стальной пластины, образующей тупой угол, как показано на Фиг.23. Используемая пластина может быть стальной пластиной с толщиной один дюйм (25,4 мм), причем ее соединение с частью кронштейна может быть усилено с помощью треугольной скобы или клина 424. На закругленном конце каждой концевой части предусмотрено круглое отверстие 426, чтобы в них можно было вставлять соответствующий палец 56 сцепного устройства тележки, показанный на Фиг.1, 2 и 5. Таким образом, сцепное устройство согласно изобретению может быть соединено с возможностью поворота со смежным вторым подвижным механизмом посредством этих пальцев сцепного устройства, которые обеспечивают относительное перемещение с возможностью поворота вокруг горизонтальной оси между двумя подвижными механизмами или подвижными конвейерами.
Как показано на Фиг.18, на верху блока 406 может быть сформирован канал 430 для смазочного материала, при этом в блоке в наружном конце этого канала установлен фиттинг масленки или масленка Зерка. Вокруг шарнирного пальца проходят стекловолоконные втулки 432, причем одна из них расположена рядом с фланцем 388, а другая расположена рядом с наружным концом канала 404 пальца. Кроме того, стекловолоконный подшипник 434 осевого давления может быть зажат между внутренним концом блока 406 в неглубокой круглой выемке 436 и фланцем 388. Механизм 44 сцепки удерживается на центральном шарнирном пальце 56 посредством кольцевой стопорной пластины 436, которая может быть пластиной с толщиной 7/8 дюйма (22,2 мм), имеющей центральное отверстие диаметром 1 и 13/16 дюйма (46 мм). Как пластина 436, так и шарнирный палец выполнены с совмещенными отверстиями, чтобы можно было вставить установочный штифт 438, который предназначен для предотвращения вращения пластины относительно пальца. Пластина 436 удерживается на месте посредством винта 440 длиной 3 и 1/2 дюйма (89 мм), который проходит в отверстие с резьбой, выполненное в центре шарнирного пальца. Таким образом, можно видеть, что механизм 44 сцепки может свободно поворачиваться вокруг горизонтальной оси поворота, образованной шарнирным пальцем, обеспечивая тем самым относительное перемещение вокруг этой оси поворота между смежными соединенными подвижными конвейерными транспортными средствами.
Для использования с автоматической рулевой системой для состава этих подвижных конвейерных механизмов этого типа, который описан выше, для рулевой системы может быть желательно знать межвагонный угол между смежными тележками в указанном составе. Вследствие того, что настоящий подвижный конвейерный механизм не имеет никакого шарнира, расположенного в оси поворота между смежными тележками (другими словами, имеется только виртуальная точка поворота на полпути между двумя колесами описанного здесь механизма), совместно с поворотным механизмом настоящего изобретения может быть предусмотрен специальный датчик межвагонного угла, так чтобы электрический сигнал, указывающий на межвагонный угол, мог быть доставлен рулевому управлению конвейерного состава. Иллюстративная форма такого датчика изображена на Фиг.24 и 25. Этот датчик, обозначенный в целом номером позиции 450, выполнен с возможностью определения угла между центральной продольной осью проиллюстрированного подвижного конвейерного механизма 10 и центральной продольной осью другого подвижного конвейерного механизма, который может быть выполнен тем же самым или аналогичным образом, как и проиллюстрированный механизм. Хотя это и не показано на Фиг.24, датчик содержит вышеупомянутую натянутую цепь 374 ролика, установленную в направляющей 46. Следует понимать, что эта цепь формирует ряд выемок для взаимодействия со звездочками, сформированных вдоль одной стороны направляющей для по меньшей мере большей части длины направляющей. Другой главный элемент датчика представляет собой вращательный преобразователь 452 положения, который установлен на механизме 44 сцепки и, в частности, на опорном корпусе 376 ролика. Датчик имеет снабженную датчиком звездочку 454, которая приводит в действие кодирующее устройство для измерения межвагонного угла. Преобразователь 452 в одном варианте выполнения посылает сигнал на программируемый логический контроллер (ПЛК) фирмы Siemens, который используется для рулевого управления составом транспортных средств. Этот преобразователь, который может иметь стандартную конструкцию, может иметь выходной сигнал в диапазоне между 4 и 20 миллиамперами, с выходным сигналом в зависимости от измеренного межвагонного угла.
В отношении Фиг.24 и 25, в дополнение к преобразователю на этих чертежах показан крепежный кронштейн 456, который имеет кольцевую концевую часть 458, на которой может быть установлен преобразователь. Кронштейн 456 прикреплен посредством шарнирного пальца 457 к нижнему краю боковой пластины 392, причем этот шарнирный палец проходит через отверстие 458. В этом отверстии также могут быть установлены два подшипника 460 трения Oilite, по одному в каждом конце. Для установки вала с возможностью вращения для звездочки 454 предусмотрены шарикоподшипники 462 с двумя глубокими углублениями, расположенные рядом друг с другом. Подшипники могут удерживаться в отверстии посредством стопорного кольца 464. На подшипниках со стороны преобразователя может быть предусмотрено дополнительное наружное стопорное кольцо 466. Держатель 468 преобразователя приварен к кронштейну со стороны, противоположной звездочке, и проходит по дуге, большей, чем 270 градусов. К этому держателю четырьмя винтами 470 прикреплена монтажная пластина 472 преобразователя. Центральный вал преобразователя проходит через эту пластину и вставлен внутрь центрального канала, сформированного в валу 474 звездочки, и прикреплен к нему (например, установочным винтом) для вращения вместе с ним. Преобразователь установлен на пластине 472 с возможностью отсоединения с помощью четырех винтов 476. Конец электрического управляющего кабеля, функционально соединенный с преобразователем, обозначен номером позиции 478.
Из приведенного выше описания можно видеть, что преобразователь и его крепежное средство с возможностью поворота установлены на пластине 392 механизма сцепки. Для этого, чтобы смещать датчик и, в особенности, его звездочку 454 во взаимодействие с цепью 374 ролика, предусмотрена удлиненная цилиндрическая пружина 480 (см. Фиг.16). Причина, по которой установлена эта пружина, состоит в том, что необходимо обеспечить некоторую гибкость держателю датчика, уменьшая тем самым возможность его повреждения, если, например, что-нибудь, такое как грязь или камень, застрянет в звездочке или в цепи ролика. Следует также отметить, что цепь ролика сама по себе поддерживается под натяжением посредством регулируемой тяги 482 натяжения на одном или на обоих концах цепи.
Обратимся теперь к крепежному механизму, который содержит соединительные опорные средства для ведомого шкива 32. Этот крепежный механизм, как наиболее отчетливо видно на Фиг.13, 26 и 29, содержит два параллельных соединительных элемента 330 и 332, которые с возможностью поворота установлены на держателе 334, установленном на внутренней части рамы 16 при помощи соединительной пластины 336. Внутренние концы соединительных элементов расположены рядом или на продольной осевой линии тележки и с возможностью поворота соединены с центральным элементом монтажной рамы 336, который поддерживает в целом вертикально проходящий шарнирный соединитель, выполненный в форме пальца 338. К этому шарнирному соединителю с возможностью поворота присоединен управляющий конвейерной лентой рычаг 240, который, в свою очередь, с возможностью поворота соединен с приводной тягой привода направления конвейерной ленты, который содержит гидравлический цилиндр 242. Закрытый конец этого цилиндра с возможностью поворота соединен с горизонтальной опорной пластиной 244.
Сам ведомый шкив содержит две выполненные с возможностью вращения секции 246 и 248, которые вращаются вокруг неподвижного центрального опорного вала 250, который проходит от противоположных сторон центральной опорной части в форме круглого опорного блока 252, жестко соединенного с одним концом управляющего кронштейна 240. На противоположных сторонах центральной опорной части установлены два центральных подшипника 512, причем каждый из них с возможностью вращения поддерживает соответствующую секцию 246, 248 шкива. Наружная часть этих секций известным образом содержит ряд параллельных, отделенных друг от друга металлических планок, внутренние концы которых закреплены на кольцевом опорном блоке 502. На наружном конце каждой части вала 50 для поддержания наружного конца соответствующей секции шкива также установлен внешний подшипник 516. Дополнительная поддержка ведомого шкива в продольном направлении обеспечивается горизонтально проходящими элементами 260, 262 рамы, которые прочно присоединены к центральной раме 336, а также соединены с пластиной 244.
Детали конструкции механизма ведомого шкива, включая его две секции 246, 248 и опорный элемент шкива, на котором эти секции шкива установлены с возможностью вращения, показаны на Фиг.27, 29 и 30. Каждая секция ведомого шкива содержит удлиненную трубу 500, имеющую кольцевой опорный блок 502, приваренный к ее внутреннему концу, и кольцевой опорный блок 504 меньшего размера, приваренный к ее наружному концу. Вдоль трубы проходит, а также распределен по ее окружности ряд поддерживающих планку пластин 506, а на наружном краю каждой из этих пластин установлена стальная полоса или планка 508. Между пластинами 506 проходит, соединяя их, ряд сужающихся соединительных пластин 510. Роликоподшипники 512 установлены внутри большего опорного блока 502. В одном варианте выполнения эти роликоподшипники представляют собой сужающиеся роликоподшипники фирмы Timkin, изделие № 29586 конус/29520 чашка. Рядом с этими подшипниками установлено подходящее уплотнение, например CR-уплотнение типа CRWHA1, изделие № 30095. Аналогично, вышеупомянутые внешние подшипники 516 установлены в наружном опорном блоке 504. В одном варианте выполнения эти подшипники представляют собой сужающиеся на конус подшипники фирмы Timkin, изделие № LM 104949 конус/LM 104911 чашки. Эти подшипники удерживаются на месте с помощью контргайки 518 подшипника и гаечной шайбы. Контргайку закрывает торцевая заглушка 519, имеющая проходящий по окружности соединительный фланец. Этот фланец соединен винтами 521 с опорным блоком 504.
Обратимся теперь к конструкции опорного элемента шкива, обозначенного в целом номером позиции 520 на Фиг.31 и 32. Этот элемент содержит вышеупомянутый опорный вал, который разделен на две подобные наружные части и центральную опорную часть 522. В изображенном на чертежах варианте выполнения вал выполнен из двух элементов из мягкой стали, включая удлиненный элемент 524 вала, и из кольцевого центрального элемента 526, через который проходит элемент 524 вала. Центральный элемент 526 прикреплен к элементу 524 путем нагрева элемента 526 до температуры в диапазоне от 350 градусов до 400 градусов Фаренгейта (от 177 градусов до 204 градусов Цельсия), размещения его по центру на более толстую центральную часть элемента 524, а затем медленного охлаждения элемента 526. Элемент 524 вала может иметь сужающиеся части в местах, обозначенных номерами позиций 528 и 530. На каждом наружном конце элемента 524 вала нарезана резьба в месте, обозначенном номером позиции 532, чтобы прикрепить вышеупомянутую контргайку 518. Может быть предусмотрено гнездо 534 под гайку, чтобы удерживать контргайку на месте.
К одной стороне центральной опорной части 522 прикреплен короткий соединительный блок 536, изготовленный из стальных пластин и присоединенный к втулке 538 шарнирного пальца. К одной стороне этой втулки прочно прикреплен (например, посредством сварки) управляющий кронштейн 240, который может быть трубчатым и иметь квадратное поперечное сечение. Как показано, этот кронштейн 240 проходит параллельно смежной части элемента 524 вала. К верхней части управляющего кронштейна 240 присоединена соединительная пластина 540, которая прикреплена соответствующим шарнирным пальцем, проходящим через отверстие 542, к приводной тяге гидравлического цилиндра 242.
Иллюстративные соединительные элементы 330, 332, как показано, имеют идентичную конструкцию, что лучше всего видно на Фиг.26. Каждый соединительный элемент или поворотный кронштейн содержит прямоугольный полый элемент 550, который содержит удлиненную верхнюю пластину 552, аналогичную нижнюю пластину и две плоские прямоугольные боковые пластины 554. Также имеются две прямоугольные концевые пластины (не показаны), которые проходят между верхней и нижней пластинами, а также между двумя боковыми пластинами. На верхней пластине 552 установлены две соединительные пластины 556, каждая из которых имеет круглое отверстие на одном своем конце для вставления шарнирного пальца. Рядом с каждым из отверстий может быть предусмотрен прямоугольный наплыв 558, предназначенный для зацепления плоской стороны на головке соответствующего смежного шарнирного пальца 560. Следует понимать, что предусмотрены два шарнирных пальца на внутренних концах поворотного кронштейна и два шарнирных пальца на внешних концах поворотного кронштейна. С обеих сторон каждого поворотного кронштейна установлено дополнительное соединительное приспособление 562 линии смазочного материала. Линии, присоединенные к каждому соединительному приспособлению, могут обеспечить смазочный материал соответствующему шарнирному пальцу 560, 338. В одном варианте выполнения каждый шарнирный палец 560 представляет собой палец диаметром 1 и 1/4 дюйма (32 мм) и длиной 8 и 1/16 дюйма (205 мм), включая его увеличенную головку. Задний конец каждого пальца может иметь кольцевую выемку для размещения в ней кольцевого фиксатора.
В отношении проиллюстрированной конструкции центрального элемента 336 монтажной рамы, то этот элемент содержит плоскую верхнюю пластину 564 и аналогичную нижнюю пластину 566, причем между этими двумя пластинами проходит и соединяет их вертикальная пластина 568. На противоположных концах пластины 568 расположены две подобные цилиндрические втулки 570 и 572, каждая из которых имеет короткий проход в ее центре для введения смазочного материала посредством масленки Зерка или посредством присоединенной к ней вышеупомянутой линии смазочного материала. Кронштейн 574 шарнирного пальца приварен к стороне втулки 572 и содержит прямоугольную соединительную пластину 576 и два хомута или язычка 578, 582, каждый из которых имеет отверстие для размещения шарнирного пальца 338. Хомут 578 может иметь неглубокую выемку в месте, обозначенном номером позиции 584, чтобы вместить головку шарнирного пальца, причем с одной стороны эта выемка может быть плоской, чтобы разместить плоскую сторону головки шарнирного пальца, предотвращая тем самым вращение шарнирного пальца в отверстиях хомута. Здесь следует отметить, что, хотя палец 338 образует поворотную ось, которая проходит в целом вертикально, в иллюстративном изображенном варианте выполнения эта ось поворота наклонена под небольшим острым углом к вертикали, причем этот угол приблизительно соответствует углу наклона конвейерной ленты, которая проходит вокруг секций ведомого шкива. В одном варианте выполнения конвейерного транспортного средства этот угол наклона имеет величину меньше 10 градусов. Как используется в дальнейшем в связи с поворотной осью, образованной пальцем 338, выражение "в целом вертикально проходящий" или эквивалентное выражение включает не только вертикальную поворотную ось, но также и ось, проходящую вертикально, но под острым углом к вертикальной оси. Элемент 260 рамы, который может быть трубчатым по своей конструкции и иметь квадратное поперечное сечение, может быть приварен к стороне втулки 570, проходя под углом в 90 градусов к пластине 568. Элемент 262 рамы может также быть трубчатым по своей конструкции с квадратным поперечным сечением. Этот элемент приварен к стороне втулки 572 и к концевой части элемента 260.
Соединяющий опорный механизм для опорного элемента шкива включает вышеупомянутый соединительный держатель 334. Как показано, он содержат две цилиндрические втулки 586, 588, каждая из которых приварена к установочному блоку 590, 592. Основание каждого из этих блоков приварено к соединительной пластине 331, которая имеет отверстия 594 для размещения болтов. В одном варианте выполнения имеется восемь отверстий 594, распределенных по пластине, причем каждое отверстие имеет диаметр, равный 25/32 дюйма (20 мм). Каждый опорный блок и его соответствующая втулка установлены под небольшим острым углом к вертикали, причем этот угол соответствует требующемуся углу установки шарнирного пальца 338 относительно вертикали.
Опорный блок 592 может быть выполнен большего размера, чем блок 590, чтобы в выполненное в нем горизонтальное отверстие можно было вставить фотоприемник 268, который является частью фотодатчика, описанного ниже.
Положение ведомого шкива может быть отрегулировано в целях натяжения конвейерной ленты либо вручную с использованием привода или гидравлического цилиндра 242, либо автоматически. Чтобы обеспечить альтернативную систему автоматической регулировки для корректировки положения, рядом с каждым концом ведомого шкива конвейерной ленты может быть предусмотрен фотодатчик, такой как светолучевой датчик. Как проиллюстрировано, имеется два излучающих фотоэлемента 266, установленных на криволинейной направляющей 46. Для каждого из этих излучающих фотоэлементов имеется фотоприемник 268, который можно видеть изображенным на Фиг.13. Пока конвейерная лента должным образом отцентрирована на ведомом шкиве, импульсы луча света могут исходить из каждого излучающего фотоэлемента 266 (через зазоры в смежной секции шкива) к соответствующему ему фотоприемнику, который установлен на внутренней части одного из продольных элементов рамы, формирующих раму 16. Однако если конвейерная лента перемещается в поперечном направлении на ведомом шкиве так, что полностью блокирует один из лучей света, это указывает программируемому логическому контроллеру (например, путем приостановки передачи управляющего сигнала или сигналов), что, в свою очередь, вызывает сокращение или удлинение приводной тяги гидравлического цилиндра 242. Приводная тяга перемещается в таком направлении, чтобы привести к повороту центрального вала ведомого шкива в, по существу, горизонтальной плоскости для натяжения конвейерной ленты на той стороне, в которую переместилась лента. Это имеет тенденцию к перемещению ленты обратно к желательной центральной области ведомых шкивов.
В иллюстративном варианте выполнения каждый фотодатчик совмещен с концевой секцией ведомого шкива так, чтобы луч света периодически прерывался параллельными планками снаружи ведомого шкива. Из-за такого расположения каждый фотоприемник посылает импульсный сигнал в программируемый логический контроллер, когда конвейерная лента не полностью блокирует луч света. Таким образом, если лента должным образом отцентрирована, импульсные сигналы посылаются в контроллер обоими фотоприемниками 268. Когда импульсный сигнал не испускается одним из приемников света, то это указывает на то, что лента слишком сильно переместилась в направлении этого конкретного приемника, и система управления предпринимает шаги для повторной центровки ленты.
На Фиг.34(а)-34(е) изображен ряд диаграмм, иллюстрирующих файл программы программируемого логического контроллера (ПЛК) для управления системой натяжения конвейерной ленты посредством вышеупомянутых фотодатчиков. Программируемый логический контроллер в одном варианте выполнения представляет собой контроллер S7314C фирмы Siemens. В одном иллюстративном конвейерном составе имеется пятнадцать транспортных конвейерных средств, включая тринадцать промежуточных тележек, изображенных на Фиг.1-5, причем разгрузочная тележка имеет две пары колес, а загрузочная тележка имеет одну единственную пару колес. Для каждой пары колес предусмотрен программируемый логический контроллер, и, таким образом, для каждого транспортного средства состава имеется один контроллер, за исключением разгрузочной тележки, для которой предусмотрено два таких контроллера. Контроллер каждой тележки работает аналогичным образом, поскольку системой натяжения конвейерной ленты управляют эти контроллеры.
На Фиг.34(а) изображен первый этап в программной последовательности, известный как задержка левого датчика конвейерной ленты. В соответствии с этим этапом, если фотоприемник 268, расположенный на левой стороне конвейерной ленты, заблокирован лентой так, что он не получает импульсный сигнал, контроллер определяет, был ли датчик заблокирован в течение заранее заданного промежутка времени, например двух секунд. Если левый датчик ленты был заблокирован в течение этого промежутка времени, то контроллер запускает бит левой задержки ленты. В целях иллюстрации на Фиг.34 буква "R" означает перезапуск для повторной установки, буквы "TV" обозначают переменную времени, буква "S" означает "таймер включен", а буквы "S_ODT" означают "таймер не работает".
Второй этап, представленный на Фиг.34(b), можно назвать задержкой правого датчика ленты. Этот этап представляет собой, по существу, тот же самый этап контроллера, что и первый этап, изображенный на Фиг.34(а), но для правого датчика ленты. В соответствии с этим этапом, если правый датчик ленты выключен в течение заранее заданного промежутка времени, например в течение двух секунд, то контроллер запускает правый бит задержки ленты. Снова следует понимать, что правый датчик ленты будет выключен или заблокирован, если конвейерная лента отклонилась на ведомом шкиве слишком сильно вправо и блокирует фотоприемник 268 на правой стороне.
Третий этап в управляющей последовательности представлен на Фиг.34(с), который является этапом команды запуска конвейера. В соответствии с этим этапом контроллер определяет, получил ли он запрос о запуске конвейера или нет. Нужно понимать, что в случае конвейерного состава, включающего соединенные между собой конвейерные транспортные средства, конвейеры должны запускаться в определенной последовательности, для того, чтобы конвейерный состав должным образом переносил материал. В одном иллюстративном варианте выполнения одно конвейерное транспортное средство, например третье транспортное средство, обеспечивает необходимый сигнал запуска для следующего по очереди конвейерного транспортного средства, которое в этом случае является четвертым транспортным средством. Для правильного функционирования конвейерной системы конвейер на дальнем от забоя конце состава (обычно разгрузочное конвейерное транспортное средство) начинает рабочую последовательность, так что конвейерное транспортное средство на ближнем к забою конце является последним транспортным средством, на котором запускается его конвейерная лента. Таким образом, возвращаясь к этапу контроллера, проиллюстрированному на Фиг.34(с), если это конкретное конвейерное транспортное средство получило запрос на запуск конвейера, то его контроллер выжидает заранее заданный промежуток времени, например две секунды, прежде чем запустить двигатель конвейера. Эта задержка помогает гарантировать, что предыдущий конвейер, который является конвейером третьего транспортного средства в этом примере, набрал скорость до того, как запустился четвертый конвейер транспортного средства.
Обратимся теперь к четвертому этапу контроллера, проиллюстрированному на Фиг.34(б), этот этап может упоминаться как этап команды влево/вправо ленте. Контроллер сначала проверяет, чтобы определить, получил ли он сигнал для запуска его конкретного конвейера, при этом, если он получил такой сигнал, контроллер выжидает заранее заданный промежуток времени, например четыре секунды, перед выполнением любого из трех этапов контроллера, указанных на правой стороне Фиг.34(б). После заранее заданной задержки контроллер проверяет, были ли запущены левый бит задержки ленты и правый бит задержки (см. этапы 1 и 2), причем если это верно, то контроллер устанавливает бит "неисправности скорости ремня", который приводит к выключению всего с конвейерного состава. Это является мерой безопасности, потому что если эта проверка верна, то она указывает на то, что эта конкретная конвейерная лента не перемещается и, поэтому, имеется проблема, которая требует, чтобы состав был остановлен.
На следующем этапе управления, предпринятом контроллером, контроллер определяет, только ли левый датчик ленты заблокирован конвейерной лентой. Поскольку у левого датчика ленты в обычном режиме контакты замкнуты, то, когда этот датчик, который является левым фотоприемником, заблокирован, датчик пересылает мощность к левому серверу ленты (контакты которого также обычно замкнуты), запуская, таким образом, правый сервер ленты, что приводит к перемещению гидравлического цилиндра 542 в направлении, вынуждающем конвейерную ленту перемещаться вправо. Другими словами, гидравлический цилиндр заставляет ведомый шкив поворачиваться вокруг шарнирного пальца 338 так, что натяжение на левой стороне ленты увеличивается.
Согласно третьему этапу управления, проиллюстрированному на Фиг.34(с)), если правый датчик ленты заблокирован так, что правый бит задержки ленты запущен, мощность передается через правый сервер ленты и на левый сервер ленты, вынуждая, таким образом, гидравлический цилиндр переместить конвейерную ленту влево. Следует отметить, что в этой системе правый сервер ленты и левый сервер ленты связаны так, что оба не могут быть запущены одновременно.
Обращаясь к пятому этапу управления, проиллюстрированному на Фиг.34(е), этот этап может упоминаться как этап неисправности натяжения ленты. Согласно этому этапу контроллер сначала определяет, если запрос запуска конкретного конвейера верен, то есть если он был получен, а также был ли любой из датчиков ленты заблокирован (то есть выключен) в течение заранее заданного промежутка времени, например в течение десяти секунд. Если контроллер определяет, что такая ситуация имеет место, он тогда устанавливает бит неисправности натяжения ленты, который приводит к выключению всех конвейеров всего состава. На этом этапе устанавливается, что если один из датчиков ленты заблокирован в течение чрезмерного количества времени, например в течение десяти секунд, то имеется проблема с системой натяжения ленты этого конкретного транспортного конвейерного средства, неполадки в котором должны быть устранены перед дальнейшей работой конвейерного состава.
На Фиг.35 изображена иллюстративная сеть программируемых логических контроллеров для состава подвижного конвейерного устройства, как описано выше. Эта система управления работает посредством ведущего ПЛК, обозначенного номером позиции 600, который может быть расположен на разгрузочной тележке, которая, как указано, предпочтительно оборудована двумя ПЛК, по одному для каждой из его двух пар колес, так как ПЛК также могут быть использованы с целью рулевого управления. В этой конкретной системе имеется пятнадцать оснащенных микропроцессором ведомых ПЛК, которые могут быть пронумерованы от одного до пятнадцати, и которые, как показано на чертежах, имеют адреса PROcess Field BUS от 21 до 35. В предпочтительном варианте выполнения ПЛК управляются беспроводными радиокомандами, с использованием двух радиостанций, причем одна радиостанция расположена на разгрузочной тележке, а вторая радиостанция расположена на загрузочной тележке. Радиостанция загрузочной тележки обозначена номером позиции 602, тогда как радиостанция загрузочной тележки обозначена номером позиции 604. Таким образом, составом конвейерных транспортных средств можно управлять от любого конца состава, но все команды приходят из ведущего ПЛК и идут в другие ПЛК с помощью системы PROcess Field BUS. Тот же самый машинный код может быть использован в каждом ведомом ПЛК, так что конвейерные тележки являются взаимозаменяемыми для любой конкретной работы. Следует понимать, что радиостанция загрузочной тележки будет использоваться оператором загрузочной тележки для управления конвейерной системой, когда добыча полезных ископаемых находится в стадии реализации. Радиостанция разгрузочной тележки может быть использована оператором разгрузочной тележки, который также может управлять поперечным конвейером на разгрузочной тележке. Система радиоуправления снабжена блокировкой, чтобы предотвратить противоречивые сигналы, когда переключатель определяет, какая действующая радиостанция расположена на загрузочной тележке. Как проиллюстрировано на Фиг.35, радиостанции разгрузочной тележки может быть назначен адрес 40 PROcess Field BUS, тогда как радиостанции загрузочной тележки может быть назначен адрес 41 PROcess Field BUS.
Путем соединения ПЛК конвейерных транспортных средств вместе в конвейерной системе, как это показано, работа конвейерных лент может быть взаимосвязана, чтобы обеспечить ровную и эффективную работу конвейерного состава. Как показано выше, если система датчика на одной конкретной тележке определяет, что это его конвейерная лента, которая фактически не поворачивается, когда она должна это делать, вся система конвейерного состава может быть автоматически выключена, пока эта проблема не решена. Точно так же, если вышеупомянутая система датчика на любой из конвейерных тележек указывает на то, что система натяжения ленты этой тележки не работает должным образом, снова система ПЛК может совместно работать, чтобы выключить весь конвейерный состав, пока проблема не решена.
На Фиг.36 изображены электрические цепи, которые соединены с программируемым логическим контроллером одного конвейерного устройства, причем это ведомое ПЛК схематично обозначено на чертеже номером позиции 610. Это ПЛК размещено в огнеупорном корпусе, схематично обозначенном штрихпунктирной линией 612, причем этот корпус установлен в подходящем месте на транспортном средстве. В этом корпусе также установлен стеллаж 614, на котором могут быть включены искробезопасные барьеры, обозначенные в целом номером позиции 616, причем эти барьеры, которые хорошо известны в уровне техники горнодобывающего оборудования, предусмотрены для предотвращения перегрева и т.п., что может вызвать воспламенение. Два излучающих фотоэлемента 266 также изображены схематично на этом чертеже, при этом они присоединены к искробезопасному источнику 618 электропитания с напряжением в 12 В, который размещен в корпусе 612. Излучающие фотоэлементы могут быть стандартными блоками, такими как искробезопасные излучающие фотоэлементы, продаваемые компанией Banner Engineering. Излучающие фотоэлементы включаются, когда сам конвейер включается посредством главного выключателя. Также показаны два соленоида 620, которые электрически соединены с ПЛК 610 и управляют их двумя соответствующими гидравлическими клапанами, которые управляют гидравлическим цилиндром 242. Верхним из этих двух соленоидов является правый соленоид ленты, который включается, чтобы переместить ленту вправо, тогда как нижний соленоид представляет собой левый соленоид ленты, предназначенный для перемещения ленты влево. Два последних элемента, проиллюстрированные на этом чертеже, являются этими двумя фотоприемниками, расположенными в месте, обозначенном номером позиции 268, которые электрически соединены линиями 622 и 624 к ПЛК 610. Фотоприемники могут быть искробезопасного типа, продаваемые компанией Banner Engineering, и имеют стандартную конструкцию.
Как показано на Фиг.14 и 15, от маленькой лебедки 270 проходит широкая нейлоновая полоса 272 шириной в два дюйма (5,1 см). Лебедка и полоса размещены выше одного фотоприемника 268 и установлены на внутренней части основной рамы 16 транспортного средства. Полоса проходит к металлическому крюку, который проходит через отверстие 598, выполненное на конце вертикальной соединительной пластины 276. Пластина 276 жестко присоединена к одному краю горизонтальной пластины 244. Должно быть понятно, что, как только конвейерная лента установлена на место и проходит вокруг ведомого шкива (а также и ведущего шкива), лента может быть должным образом натянута путем натягивания полосы 272, что, в свою очередь, приведет к перемещению элементов 260, 262 опорной рамы и центральной рамы 336 в направлении к концу ведомого шкива транспортного средства.
Хотя настоящее изобретение было проиллюстрировано и описано как воплощенное в иллюстративном варианте выполнения, то есть в варианте выполнения, который особенно полезен для использования в низкопрофильном подвижном конвейерном транспортном средстве, подходящем для использования с другими аналогичными транспортными средствами, нужно понимать, что настоящее изобретение не ограничено изображенными здесь деталями, поскольку следует понимать, что различные изъятия, модификации, замены и изменения в формах и деталях раскрытого транспортного средства, его механизма ведомого шкива и их способа работы могут быть осуществлены специалистами в этой области техники, не отступая никоим образом от сущности и объема настоящего изобретения. Например, специалисты в области конвейеров легко приспособят настоящее описание к различным другим применениям конвейера, не отступая от сущности и объема настоящего изобретения.








Конвейерное устройство содержит удлиненную несущую конструкцию конвейера и опорные устройства для конвейерной ленты, установленные на этой несущей конструкции. Опорные устройства включают механизм ведомого шкива, имеющий две секции, установленные на опорном элементе шкива с возможностью вращения вокруг общей центральной оси вращения. Опорный элемент шкива содержит центральную опорную часть, расположенную на внутренних концах секций шкива и проходящую радиально в наружном направлении от внутренних концов относительно оси вращения к вертикально проходящей оси поворота. Соединительное опорное устройство устанавливает опорный элемент шкива на несущей конструкции конвейера и содержит шарнирный соединитель, соединяющий центральную опорную часть с соединительным опорным устройством с обеспечением поворотного движения вокруг оси поворота. Привод может поворачивать опорный элемент шкива вокруг оси поворота. Обеспечивается поддержание ленты в центральной области механизма ведомого шкива при использовании в низкопрофильном конвейерном устройстве. 3 н. и 17 з.п. ф-лы, 40 ил.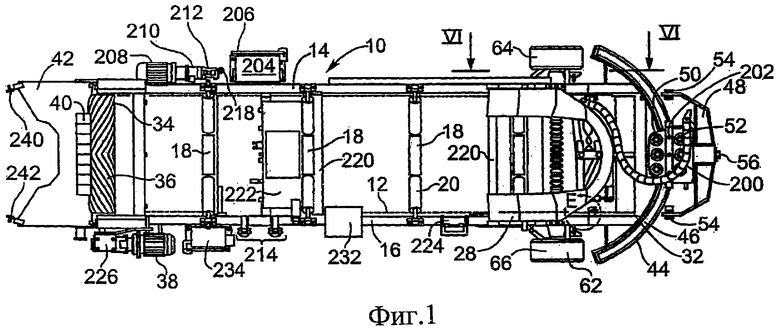
1. Конвейерное устройство, предназначенное для использования с непрерывной гибкой конвейерной лентой, содержащее:
удлиненную несущую конструкцию конвейера, в которой противоположные продольные стороны проходят между двумя ее концами,
опорные устройства для конвейерной ленты, установленные на несущую конструкцию и распределенные вдоль нее с обеспечением удержания конвейерной ленты с возможностью поворота, причем указанное опорное устройство содержит механизм ведомого шкива, выполненный с возможностью изменения направления поворота ленты на обратное и имеющий две секции ведомого шкива, установленные на опорном элементе шкива с возможностью вращения вокруг общей центральной оси вращения, проходящей в целом поперечно относительно указанных продольных сторон, при этом указанные секции ведомого шкива имеют смежные внутренние концы, а указанный опорный элемент шкива содержит центральную опорную часть, расположенную на указанных внутренних концах и проходящую радиально в наружном направлении от указанных внутренних концов относительно указанной оси вращения к в целом вертикально проходящей оси поворота,
соединительное опорное устройство, предназначенное для установки указанного опорного элемента шкива на несущей конструкции конвейера, причем указанное устройство содержит шарнирный соединитель, соединяющий указанную центральную опорную часть с соединительным опорным устройством для обеспечения поворотного перемещения вокруг указанной оси поворота, и
поворотный механизм, предназначенный для поворота указанного опорного элемента шкива вокруг указанной оси поворота с обеспечением поддерживания указанной конвейерной ленты в пределах желаемой центральной области ведомого шкива, образованной секциями ведомого шкива, во время использования конвейерного устройства.
2. Конвейерное устройство по п.1, в котором указанный поворотный механизм содержит рычаг управления конвейерной лентой, прочно прикрепленный к центральной опорной части с возможностью поворотного перемещения, и гидравлический линейный приводной механизм, имеющий приводную тягу, соединенную с возможностью поворота с указанным рычагом.
3. Конвейерное устройство по п.1, в котором указанное соединительное опорное устройство содержит два параллельных отделенных друг от друга соединительных элемента, которые установлены с возможностью поворота на указанной несущей конструкции конвейера и внутренние концы которых расположены рядом с продольной средней линией несущей конструкции или на ней, и центральный элемент монтажной конструкции, присоединенный с возможностью поворота к указанным внутренним концам соединительных элементов и имеющий указанный шарнирный соединитель.
4. Конвейерное устройство по п.1, в котором указанный опорный элемент шкива содержит две коаксиальные части центрального вала, которые проходят от противоположных сторон указанной центральной опорной части и на каждой из которых установлены подшипники внутреннего конца и наружного конца для поддержки с возможностью вращения соответствующей одной из указанных секций шкива на ее секции вала.
5. Конвейерное устройство по п.1, содержащее светолучевые датчики, предназначенные для регистрации смещения указанной конвейерной ленты из указанной желательной центральной области и для сообщения о наличии указанного смещения электронному контроллеру, выполненному с возможностью управления работой указанных поворотных средств.
6. Конвейерное устройство по п.5, в котором указанный датчик содержит два излучающих фотоэлемента и два фотоприемника, причем каждый излучающий фотоэлемент и совмещенный с ним фотоприемник расположены смежно с внешней концевой секцией соответствующей одной из двух указанных секций ведомого шкива, и во время использования указанного датчика блокировка конвейерной лентой луча света от любого излучающего фотоэлемента к его фотоприемнику приводит к тому, что этот фотоприемник сообщает об указанной блокировке указанному контроллеру, который вызывает поворот указанного опорного элемента шкива указанным поворотным механизмом в направлении, при котором увеличивается натяжение в указанной конвейерной ленте на той ее продольной стороне, где луч света был заблокирован.
7. Конвейерное устройство по п.1, содержащее пару совмещенных в поперечном направлении колесных узлов, предназначенных для поддержки и перемещения указанного конвейерного устройства, при этом каждый колесный узел содержит опорную конструкцию для колеса, соединенную с соответствующей одной из указанных продольных сторон несущей конструкции, и колесо, установленное на указанной опорной конструкции с возможностью поворотного перемещения вокруг соответствующей, по существу, вертикальной оси поворота для осуществления рулевого управления конвейерным устройством.
8. Конвейерное устройство по любому из пп.1-7, в котором указанные опорные устройства для конвейерной ленты содержат ведущий шкив, полностью изменяющий направление перемещения конвейерной ленты на обратное, и ряд неприводных расположенных на расстоянии друг от друга роликов, причем как указанный механизм ведомого шкива, так и указанный ведущий шкив установлены на указанной несущей конструкции смежно с соответствующим одним из указанных концов, и указанное конвейерное устройство содержит двигатель для приведения во вращение указанного ведущего шкива и, таким образом, приведения в действие указанной конвейерной ленты.
9. Конвейерное устройство, предназначенное для использования с бесконечной гибкой конвейерной лентой для перемещения добытого ископаемого материала, содержащее:
удлиненную несущую конструкцию конвейера, в которой противоположные продольные стороны проходят между двумя ее концами,
опорные устройства для конвейерной ленты, установленные на несущей конструкции и распределенные вдоль нее с обеспечением возможности поворота конвейерной ленты, причем указанные опорные устройства включают механизм ведомого шкива, выполненный с возможностью изменения направления поворота конвейерной ленты на обратное и установленный на опорном элементе шкива с возможностью вращения вокруг центральной оси вращения, проходящей в целом поперечно относительно указанных продольных сторон,
опорное устройство, предназначенное для установки опорного элемента шкива на несущей конструкции конвейера, причем указанный опорный элемент шкива установлен на опорном устройстве с возможностью поворотного перемещения вокруг, по существу, вертикальной оси поворота, образованной указанным опорным устройством и расположенной посередине между указанными продольными сторонами несущей конструкции,
приводной механизм, предназначенный для осуществления поворота опорного элемента шкива и его механизма ведомого шкива вокруг указанной оси поворота с обеспечением поддержания конвейерной ленты в пределах желаемой центральной области механизма ведомого шкива во время использования конвейерного устройства, контроллер, выполненный с возможностью управления работой приводного механизма, и
светолучевой датчик, предназначенный для определения смещения указанной конвейерной ленты из желаемой центральной области и для сообщения указанному контроллеру о наличии указанного смещения, при этом, когда луч света указанного датчика заблокирован конвейерной лентой во время использования конвейерного устройства, контроллер вызывает поворот указанного опорного элемента шкива указанным приводным механизмом в направлении, при котором имеется тенденция увеличения натяжения в конвейерной ленте на той ее продольной стороне, где луч света заблокирован.
10. Конвейерное устройство по п.9, в котором указанный механизм ведомого шкива содержит две коаксиальные секции ведомого шкива, которые установлены встык и каждая из которых включает удлиненную внутреннюю опорную секцию, установленную с возможностью поворота на указанном опорном элементе шкива, и ряд отстоящих друг от друга металлических планок, распределенных по окружности вокруг указанной внутренней опорной секции и установленных на ней, причем между смежными металлическими планками образованы воздушные промежутки.
11. Конвейерное устройство по п.9, в котором указанный приводной механизм представляет собой гидравлический линейный привод, имеющий приводную тягу, причем указанный опорный элемент шкива имеет рычаг управления конвейерной лентой, жестко присоединенный к центральной опорной части опорного элемента шкива, а указанная приводная тяга с возможностью поворота соединена с внешним концом указанного рычага.
12. Конвейерное устройство по п.9, которое представляет собой низкопрофильное конвейерное транспортное средство, имеющее высоту, не превышающую один метр пятьдесят сантиметров, и содержащее пару совмещенных в поперечном направлении колесных узлов, предназначенных для поддержки и перемещения указанного конвейерного устройства, при этом каждый колесный узел содержит опорную конструкцию для колеса, соединенную с соответствующей одной из указанных продольных сторон несущей конструкции, и колесо, установленное на указанной опорной конструкции с возможностью поворотного перемещения вокруг соответствующей, по существу, вертикальной оси поворота для обеспечения рулевого управления конвейерным устройством.
13. Конвейерное устройство по любому из пп.9-12, в котором указанный датчик включает два излучающих фотоэлемента и два фотоприемника, каждый из которых совмещен с соответствующим одним из указанных фотоэлементов с возможностью получения луча света от соответствующего ему излучающего фотоэлемента, при этом каждый излучающий фотоэлемент и совмещенный с ним фотоприемник расположены смежно с соответствующей одной из двух внешних концевых секций механизма ведомого шкива.
14. Конвейерное устройство, предназначенное для использования с бесконечной конвейерной лентой, которая проходит вокруг двух шкивов, изменяющих направление движения конвейерной ленты на обратное, и выполнена с возможностью работы под натяжением, содержащее:
несущую конструкцию конвейера,
не вращающийся опорный элемент шкива, на котором установлено одно из двух устройств шкива с возможностью вращения вокруг оси вращения, подвижное опорное устройство, предназначенное для установки опорного элемента шкива на несущей конструкции конвейера, причем указанный опорный элемент шкива установлен на опорном устройстве с возможностью поворотного перемещения вокруг, по существу, вертикальной оси поворота,
приводной механизм, предназначенный для поворота указанного опорного элемента шкива и его механизма ведомого шкива вокруг указанной оси поворота для поддержания указанной конвейерной ленты в, по существу, центральном совмещении с указанным одним механизмом ведомого шкива во время использования конвейерного устройства, и
регулирующий механизм, выполненный с возможностью регулирования положения части указанного опорного механизма относительно указанной несущей конструкции с обеспечением увеличения или уменьшения полного натяжения в конвейерной ленте, при этом регулирующий механизм выполнен с возможностью перемещения указанного опорного элемента шкива и его устройства шкива к другому устройству шкива или от него для увеличения натяжения в конвейерной ленте.
15. Конвейерное устройство по п.14, в котором указанное подвижное опорное устройство содержит два параллельных расположенных на расстоянии друг от друга соединительных элемента, которые установлены с возможностью поворота на указанной несущей конструкции конвейера и внутренние концы которых расположены рядом с продольной средней линией несущей конструкции конвейера, которая является вытянутой и, по существу, прямоугольной на виде сверху, или на ней, и центральный элемент монтажной рамы, с возможностью поворота соединенный с указанными внутренними концами соединительных элементов, причем указанный опорный элемент шкива с возможностью поворота соединен с указанным центральным элементом монтажной рамы.
16. Конвейерное устройство по п.14, в котором указанный привод представляет собой гидравлический цилиндр, имеющий приводную тягу, причем указанный опорный элемент шкива имеет рычаг управления конвейерной лентой, проходящий, по существу, горизонтально и снаружи по отношению к указанному одному устройству шкива, а указанная приводная тяга с возможностью поворота соединена с одним концом указанного рычага.
17. Конвейерное устройство по п.14, в котором указанный регулирующий механизм включает лебедку, установленную на указанной несущей конструкции конвейера, и удлиненный гибкий элемент, соединенный с указанной лебедкой с возможностью наматывания на нее или разматывания с нее, причем один конец указанного гибкого элемента соединен с указанным подвижным опорным устройством, а лебедка выполнена с возможностью притягивания указанным гибким элементом опорного устройства и, таким образом, перемещения указанного опорного элемента шкива и его устройства шкива от другого устройства шкива.
18. Конвейерное устройство по п.14, содержащее два светолучевых датчика, предназначенных для регистрации смещения конвейерной ленты из указанной желательной центральной области указанного одного устройства шкива и для сообщения о наличии указанного смещения электронному контроллеру, выполненному с возможностью управления работой указанного приводного механизма, причем каждый из указанных датчиков расположен около соответствующей одной из двух противоположных концевых секций указанного одного устройства шкива.
19. Конвейерное устройство по п.14, представляющее собой низкопрофильное конвейерное транспортное средство, высота которого не превышает один метр пятьдесят сантиметров, и содержащее пару совмещенных в поперечном направлении колесных узлов, предназначенных для поддержки и перемещения указанного конвейерного устройства, причем каждый колесный узел содержит опорную конструкцию для колеса, соединенную с соответствующей одной из двух продольных сторон несущей конструкции, и колесо, установленное на указанной опорной конструкции с возможностью поворотного перемещения вокруг соответствующей, по существу, вертикальной оси поворота для обеспечения рулевого управления конвейерным устройством.
20. Конвейерное устройство по любому из пп.15-19, в котором указанное одно устройство шкива содержит две секции ведомого шкива, каждая из которых установлена на указанном опорном элементе шкива с возможностью вращения вокруг общей центральной оси вращения, причем указанные секции ведомого шкива имеют смежные внутренние концы, а указанный опорный элемент шкива имеет центральную опорную часть, расположенную у внутренних концов секций шкива и проходящую радиально в наружном направлении от указанных внутренних концов относительно указанной оси вращения к указанной оси поворота, при этом указанный опорный элемент шкива соединен с указанным опорным устройством шарнирным пальцем.
| МОДУЛЬНЫЙ ТРАНСПОРТЕР ДЛЯ ТРАНСПОРТИРОВКИ И РАСПРЕДЕЛЕНИЯ ГРУЗОВ | 1991 |
|
RU2038274C1 |
| Конвейер | 1982 |
|
SU1102732A1 |
| US 2986266 A, 30.05.1961 | |||
| US 5659851 A, 19.08.1997 | |||
| US 6405854 В1, 18.06.2002 | |||
| US 3543597 А, 01.12.1970 | |||
| JP 2004353688 А, 16.12.2004. | |||

