,1
Изобретение относится к области автоматического регулирования.
Предлагаемая система отличается от известной, содержащей элемент сравнения, усилитель и двигатель с редуктором, тем, что иараллельно усилителю дополнительно установлен трехнозиционный релейный элемент с нетлей запаздывания, вход которого соединен со входом усилителя, а выход через делитель напряжения - с дополнительным сумматором, включенным на выходе усилителя.
Такое построение системы дает возможность нодавить автоколебания, сохранить при этом добротность и уменьшить перерегулирование в системе.
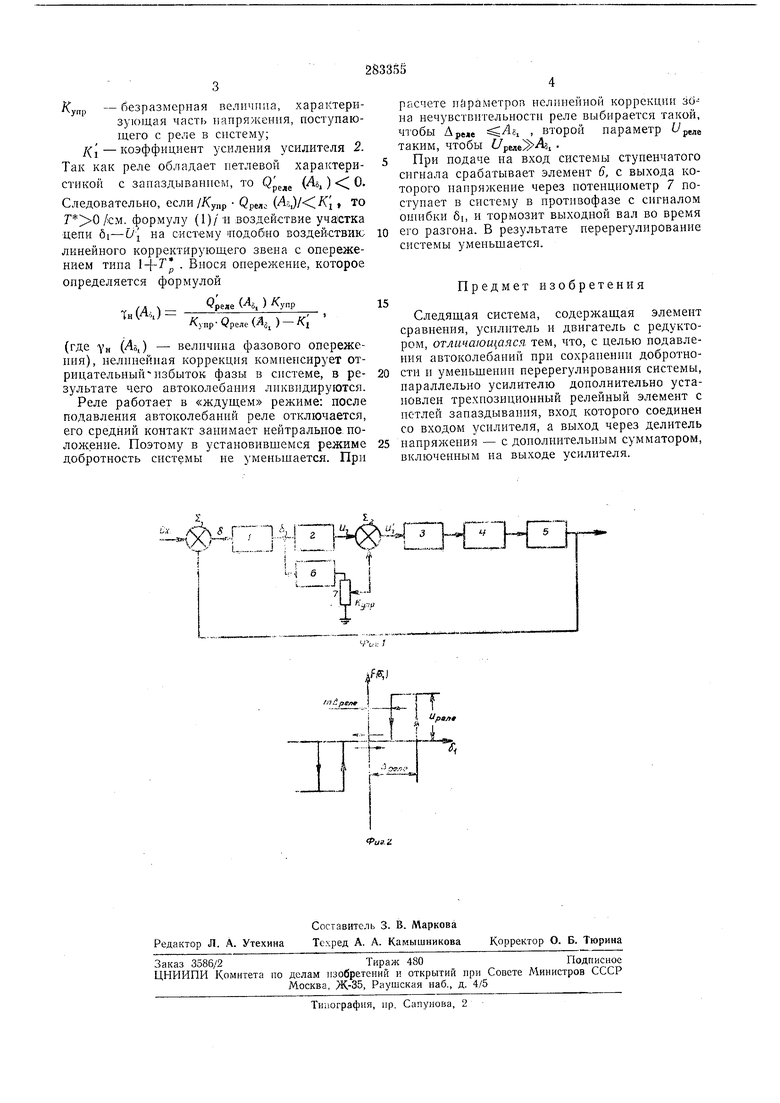
На фиг. 1 дапа блок-схема следящей системы; на фиг. 2 - характеристика трехпозиционпого релейного элемента.
Система содержит усилитель /, усилитель 2, внутренний контур с корректирующими и нелинейными элементами 3, двигатель 4, редуктор с люфтом 5, трехпозиционный релейный элемент 6 (см. фиг. 2), делитель наиряжения (потенциометр) 7 и сумматоры Si и 22.
Колебания с амплитудой Лг, поступают через усилитель 2 на сумматор 112 и одновременно на вход нелинейного элемента 6. Если АО, Ареле (где Дреле - зона нечувствительности реле), то реле срабатывает и часть напряжения с выхода реле /Супр- рые подается
на сумматор 22 в нротивофазе с колебанием AS. .При этом участок цепи 6i-6j описывается уравнением
t/; ::.- К , 5, + К,„, Qpe« (Л,Ч ) +
I I
ИЛИ
; (упр Орел. (As,) - /г;) (1 + Г (А.,;;) 5„
где r(AsJ
(KynpQp,,,(A,)-K,)
а (Эреле(Ай,) и Qp (As,) - коэффициенты гармонической линеаризации реле:
Qpeлe(A,:,):
20
С;еле(АО - -Ар«е (-/«) теЛ.
приАз.гАреяе,
m - коэффициент возврата реле; реде - напряженпе на выходных контактных
упр - безразмерная величпаа, характеризующая часть напряжения, поступающего с реле в систему; /(j-коэффициент усиления усилителя 2. Так как реле обладает петлевой характеристикой с запаздываннем, то Q,g (Л,) 0. Следовательно, если//Супр Срело (4з,), то /см. формулу (1)/ И воздействие участка цепи 6i-и на систему подобно воздействию линейного корректирующего звена с опережением типа 1+ Внося опережение, которое определяется формулой
реяе (6, ) упр
Тн(Ло)
упр-(реле()-
(где YH (,) - величина фазового опережения), нелинейная коррекция комненсирует отрицательный избыток фазы в системе, в результате чего автоколебаиия ликвидируются. Реле работает в «ждущем режиме: после подавления автоколебаний реле отключается, его средний контакт занимает нейтральное, полол«ние. Поэтому в установивщемся режиме добротность системы не уменьшается. При
расчете пйраметроп нелинейной коррекции зОна нечувствительности реле выбирается такой,
чтобы А реле «t . ВТОрОЙ ПараМбТр Ьреле таким, чтобы /реле - 1
При подаче на вход системы ступенчатого сигнала срабатывает элемент 6, с выхода которого иапряжение через потенциометр 7 поступает в систему в противофазе с сигиалом бь и тормозит выходной вал во время его разгона. В результате перерегулирование системы уменьщается.
Предмет изобретения
Следящая система, содержащая элемент сравнения, усилитель и двигатель с редуктором, отличающаяся, тем, что, с целью подавления автоколебаний при сохрапении добротности и уменьшении перерегулирования системы, параллельно усилителю дополнительно установлен трехиозиционный релейный элемент с истлей запаздывания, вход которого соединен со входом усилителя, а выход через делитель
иапряжения - с дополннтельным сумматором, включенным на выходе усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Следящая система | 1988 |
|
SU1529175A2 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 1970 |
|
SU1839997A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| Реверсивный релейный электропривод | 1976 |
|
SU661703A1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Позиционная система регулирования | 1976 |
|
SU637790A1 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
;
6
