пределы нулевого дискретного интервала и толчком назад. Наблюдается также помеха квантования (пульсации), которая приводит к пульсациям тока якоря, повышенному нагреву двигателя, искажению характеристик регуляторов.
Ошибка квантования по уровню составляет ±0,5 интервала квантования при юстировке датчика положения на нуль в середине последнего (нулевого) дискретного интервала, вследствие чего перерегулирование составляет не менее интервала квантования.
Из-за помех квантования, особенно при 12-ти интервалах квантования и менее на путь торможения, пульсации тока достигают и более. Кроме того, при наличии статических нагрузок выбор ускорения выполняется ниже предельного, в связи с чем торк ожение привода сопровождается увеличением тока двигателя при уровне скорости ниже 30-SO/o от максимальной из-за перехода к линейному регулятору с ограничелием коэффициента усиления по условиям устойчивосгн. При разгоне привода ускорение не контролируется, из-за чего - возникают ошибки, отражающиеся jja,торможении. Наличие ста1йческой нагрузки приводит к нечувствительности привода и рассогласованию в 1-2 интервала квантования, что равносильно увеличению погрешности относительно допустимо.
Целью изобретеги{.я является повышение .точности системы. Это достигается тем, что в предлагаемой системе установлены два элегиента И, два ключа, элемент НЕ и третий сумматор, прнчем выход измерите/ш. рассогласования через первый и второй ключи соединен с соотйетстБуюцдами входами третьего сумматора, выход которого соединен с третьим входом первого сумматора, Bxo.ii элемента НЕ сое.апнен с выходом релейного блока, а выход - с иервьщн входами первого и второго леме1ггов И, вторые входы которых соеди-йены с соответствующими знаковыми выходами измерителя рассогласования, а выходы - с управляющими входами соответствующих ключей.
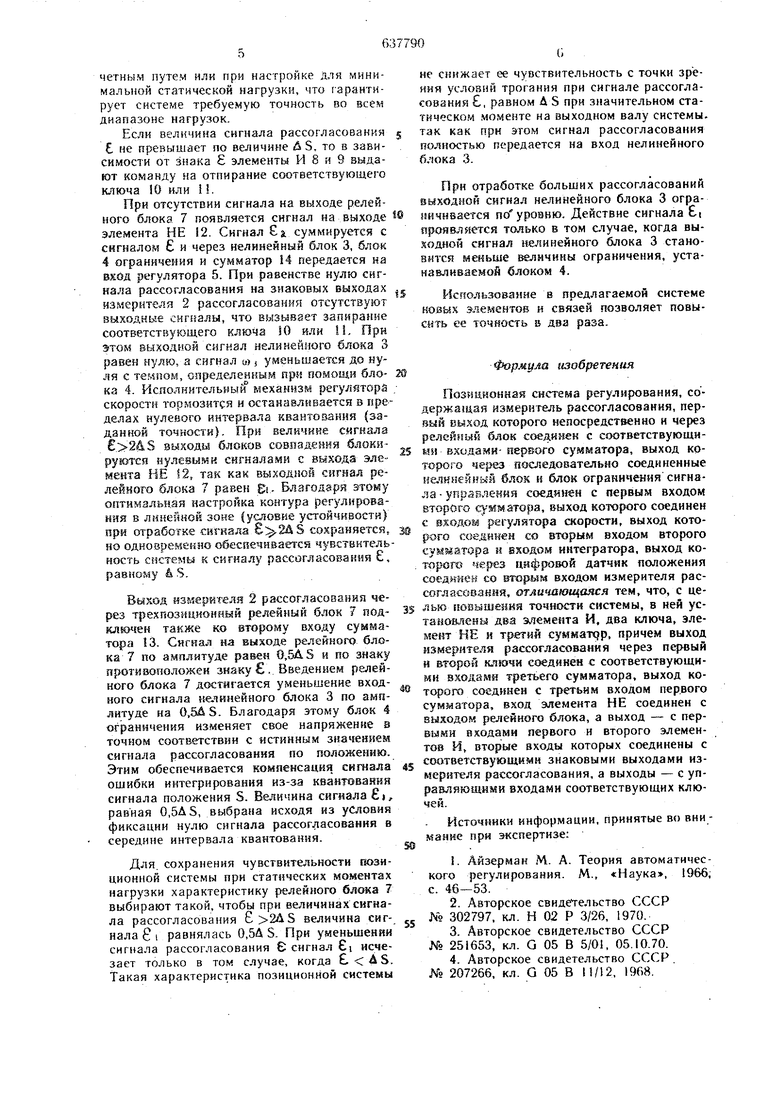
На чертеже дана блок-схема, опнсываемой системы.
Система содержит цифровой датчик I положения, HSMepHTevib 2 рассогласования, нелинейный блок 3, блок 4 ограничения сигнала управления, регулятор 5 скорости, интегратор 6, релейный блок 7, элементы И 8 к 9,. ключи 10 и П, элемент НЕ 12 и сумматоры . -цифровой сигнал задания положения; S - цифровой сигнал положения; S - аналоговый сигнал положения; С - аналоговый сигнал рассогласования; аэ сигнал задания скорости; « - сигнал скорости; E.I. - выходной сигнал релейного блока 7; С а - выходной сигиал третьего сумматора 15.
Система работает следующим образом.
Аналоговый сигнал положения S преобразуется при помощи цифрового датчика положения в цифровой сигиал S и сравнивается с цифровы.м сигналом задания положения S,-,B измерителе 2 рассогласования, который содержит двоичный накапливающий сумматор и преобразователь код-аналог. На выходе измерителя 2 рассогласования формируется сигнал рассогласования в аналоговой форме, который через первый сумматор 3 поступает на вход нелинейного блока 3.
Нелинейный блок представляет собой квадратичный преобразозатель, реализующий зависимость требуег«1ого мгнбвенкого значения скорости от рассогласования по положеник}, и корректирующий преобразователь, учитыва ощий инерционность системы регулирования скорости, что близко к описаниго опти.мальной фазовой траектории Б координатах S и и.
Выход нелрпкйного блока 3 подключен к входу блока 4 ограничения. Блок ограничения может быть выполнен как усилитель с ограничением ).туды выходного сигнала, состоящий из релейного и интегрирующего окерациоиных усилителей, охваченных общей отрицательной обратной связью. Выходной сигнал блока 4 огравичеккя (сигнал задания скорости ). глодается на второй сумматор 14 { сравнивается в с выходным сиг 1алом &) регулятора 5 ско|Х}сти. Интегратор 6 преобразует вы7. сягнал w регулятора 5 скорости в cHfHajie положения S.
Сигнал рассогласования 4i с выхода измерителя 2 рассогласования через ключи 10 и 11 и сумматор 5 подается на третий вход первого сумматора 13. Ключи 10 н 11 ysspaeлйются выходнь л и сигналами элемеитое И 8 и 9, на входы которых подаются сигналы с дополншельиых знаковых выходов измерита Я 2 рассогласования и выхода элемента НЕ 12..
Вход элемента НЕ 12 подк,пючеи к выходу трехпознционного релейного блока 7, который соединен с выходом измерителя 2 рассогласоБЗЕШя. Устройство, состоящее из эле5 мектов И 8 н 9, ключей 10 и i, элемента НЕ 12 и сумматора 5, осуществляет подк/ Ючекне сигнала рассогласования на вход первого сумматора 13 только з том случае, когда сигнал рассогласования по величине не превышает уровень квантования по
в амплитуде А S. Сигиал Ег совпадает по знаку с сигналом С и при помощи согласующего cyiv faтopa i5 устанавливается по величине, достаточной для получения такого сигнала Из. рн котором обеспечивается трогание
, и.сполнительного механизма регулятора 5 скорости с места при наличии статической нагрузки. Уровень сигнала г ограничен сверху условиями отработки сигнала AS без перерегулирования и может быть определен расчетным путем или при настройке для минимальной статической нагрузки, что гарантирует системе требуемую точность во всем диапазоне нагрузок,
Если величина сигнала рассогласования
. не превышает по величине 65, то в завнсимости от знака элементы И 8 и 9 выдают команду на отпирание соответствующего ключа Ш или 11.
При отсутствии сигнала на выходе релейного блока 7 появляется сигнал на выходе элемента НЕ 12. Сигнал SL суммируется с сигналом и через нелинейный блок 3, блок 4 ограничения и сумматор 4 передается на вход регулятора 5. При равенстве кулю сигнала рассогласования на знаковых выходах измерителя 2 рассогласования отсутствуют выходные сигналы, что вызывает запирание соответствующего ключа 10 или IL При этом выходной сигнал нелинейного блока 3 равен нулю, а сигнал at j уменьшается до нуля с , определенным пря помощи блока 4. Исполнительный механизм регулятора скорости тормозится н останавливается в пределах нулевого интервала йва5Пования (заданной точности). При величине сигнала
.24S выходы блоков совладення блокируются нулевыми сигналами с выхода элемента НЕ 12, так как выходной сигнал релейного блока 7 равен gr. Благодаря этому оптимальная настройка контура регулирования в линейной зоне (условие устойчнвостн) при отработке сигнала сохраняется, но одновременно обесяечнвается чувствительность системы к сигналу рассогласования , равному & S.
Выход измерителя 2 рассогласования через т{ ехпозициониьзй релейный блок 7 подключен также ко второму входу сумматора 13. Сигнал на выходе релейного блока 7 по амплитуде равен 0,5A.S и по знаку противоположен знаку. Введением релейного блока 7 достигается уменьшение входного сигнала ке-чинейного блока 3 по амплитуде на O.SAS. Благодаря этому блок 4 ограничения изменяет свое напряжение в точном соответствии с истинным значением сигнала рассогласования по положению. Этим обеспечивается компенсация сигнала ошибки интегрирования из-за квантования сигнала положения S. Величина сигнала d, равная 0,5AS, выбрана исходя нз условия фиксации нулю сигнала рассогласования в середине интервала квантования.
Для. сохранения чувствительности позиционной системы при стат{5ческих моментах нагрузки характеристику релейного блока выбирают такой, чтобы при величинах сигнала рассогласования 2AS величина сигнала i равнялась 0,5Л S- При уменьшении сигнала рассогласования 6 сигнал 6i исчезает только в том случае, когда 4 S. Такая характеристика позиционной системы
не снижает ее чувствительность с точки зрения условий трогания при сигнале рассогласования , равном AS при значительном статнческор4 моменте на выходном валу системы. так как при этом сигнал рассогласования полностью передается на вход нелинейного блока 3.
При отработке больших рассогласований выходной сигнал нелинейного блока 3 огра шчн8ается поуроаню. Действие сигнала ( «|юявлиется только в том случае, когда вы.ходной сигнал нелинейного блока 3 становится меньше величины ограничения, устанавливаемой блоком 4.
Использование в предлагаемой системе
новых элементов и связей позволяет повысить ее точность в два раза.
Формула изобретения
Позиционная система регулирования, содержащая измеритель рассогласования, первый выход которого непосредственно и через релеймый блок соединен с соответствующими входами-первого сумматора, выход которого через йоо едовательно соединенные е.тен€йиый блок и блок ограничения сигнала упрагаения соедннен с первым входом второго «умматора, выход которого соединен с входом регулятора скорости, выход которого соеднкен со вторым входом второго cvMSiSaTOpa и входом интегратора, выход котореш через цифровой датчик положения соединен со входом измерителя рассогласования, отличающаяся тем, что, с це5 --ьк} (ювышенкя точности системы, в ней устаковлен два элемента И, два ключа, элемент НЕ и третий сумматрр, причем выход измерите.5я рассогласования через первый и второй кйючи соединен с соответствующими входами третьего сумматора, выход которого соединен с третьим входом первого сумматора, вход элемента НЕ соединен с выходом релейного блока, а выход - с первыми входами первого и второго элементов И, вторые входы которых соединены с
соответствующими знаковыми выходами измерителя рассогласования, а выходы - с управляющими входами соответствующих ключей.
Источники информации, принятые во внимание при экспертизе;
1.Айзермак М. А. Теория автоматического регулирования. М., «Паука, 1966, с. 46-53.
2.Авторское свиде гельство СССР 5 № 302797, кл. Н 02 Р 3/26, 1970.
3.Авторское свидетельство СССР Ко 251653, кл. G 05 В 5/01, 05.10.70.
4.Авторское свидетельство СССР Л-о 207266, кл. G 05 В 11/12, 1968.

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Регулятор относительного обжатия прокатываемой полосы | 1981 |
|
SU944696A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Самонастраивающийся электропривод | 1986 |
|
SU1352454A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Многоканальный регулятор | 1987 |
|
SU1532895A1 |
| Устройство для регулирования уровня воды на участке канала | 1990 |
|
SU1781674A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕКАМЕРОЙ | 2001 |
|
RU2200971C2 |
| Следящий электропривод | 1986 |
|
SU1361694A1 |

