Известны сиособы измерения размеров погтеречного сечения тел сложной формы, нанример кулачков, состоящие в том, что тело вращают вокруг оси, перпендикулярной контролируемому поперечному сечению тела, измеряют угол его иоворота п расстояиие между касательной к контуру поперечного сечения тела и параллельной ей горизонтальной осью, проходящей через ось вращения тела.
С целью повышения точности и производительности измерения по предлагаемому способу вращение тела производят с постоянной скоростью, расстояние между касательной к контуру поперечного сечения тела и иараллельной ей горизонтальной осью, проходящей через ось вращения тела, измеряют по величине затемненной части параллельпого светового пучка, направляемого на тело перпендикулярно оси его вращения, и получепные данные об угле новорота и указанном расстоянии непрерывно нодают в счетно-рещающее устройство, реализующее вычисление текущих значений прямоугольных координат контура поперечного сечения тела по формулам:
x J cost -sina|)- , dl
где xn у - текущие абспнсса и ордината контура; R - текущая велнчина части светового пучка, затемненной телом; rj.- - угол поворота тела.
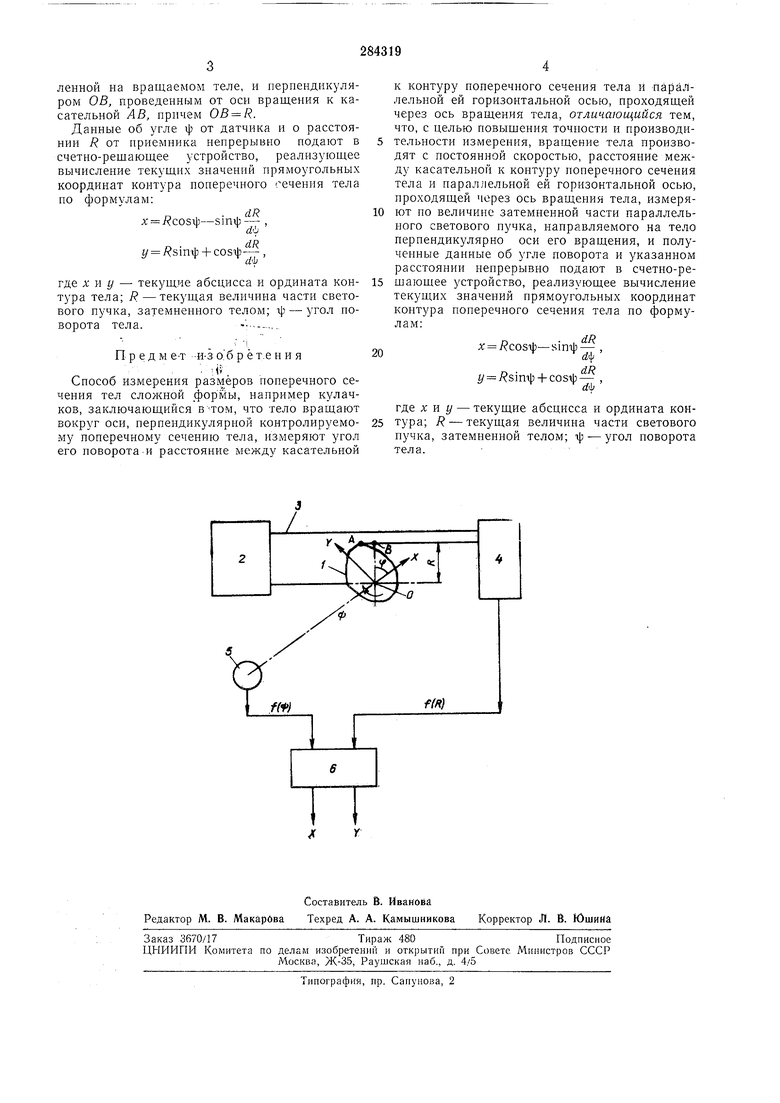
На чертеже показана блок-схема устройства, реализующего предлагаемый снособ.
Устройство содержит привод постоянпой скорости (иа чертеже не показан) измеряемого тела / сложной формы, напрпмер кулачка, источннк 2 параллельпого светового пучка 3, приемппк 4 незатемпенной части светового пучка 3, датчик 5 угла поворота тела п счетпо-решаюп1,ее устройство 6.
Предлагаемый способ состоит в следующем.
Тело вращают с постояниой скоростью вокруг оси, перпендпкулярной контролируемому поперечному сечению тела. Измеряют угол его поворота при иомощп датчика. Одиовременно с этим неирерывно измеряют расстояние R между касательной к контуру поперечного сечения тела и параллельной ей горизонтальной осью. Расстояние R нзмеряют по величине затемненной части светового пучка, направляемого от источника на тело нериеидикулярио оси его вращеиия. При этом незатемнеппая часть светового пучка попадает в
приемиик. при помощи которого паходится
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| СПОСОБ ДИНАМИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ СВЕТОВОГО ПУЧКА ФАР ТРАНСПОРТНЫХ СРЕДСТВ В ПРОЦЕССЕ ВЫПОЛНЕНИЯ ПОВОРОТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2314216C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОПЕРЕЧНОГО СЕЧЕНИЯ ТЕЛ КВАЗИЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 2016 |
|
RU2642481C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА ПАРАМЕТРОВ ПОПЕРЕЧНОГО СЕЧЕНИЯ ТЕЛ КВАЗИЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 2016 |
|
RU2645002C2 |
| НАКЛАДНОЙ ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1996 |
|
RU2180428C2 |
| Способ измерения диаметров и межосевого расстояния отверстий | 1986 |
|
SU1308835A1 |
| УСТРОЙСТВО ДЛЯ ВИЗУАЛЬНОГО И ИЗМЕРИТЕЛЬНОГО КОНТРОЛЯ ВНУТРЕННИХ ПОЛОСТЕЙ | 2004 |
|
RU2290626C2 |
| Способ бесконтактного определения геометрических параметров отверстий | 1990 |
|
SU1747878A1 |
| Способ бесконтактного измерения диаметра отверстий | 1989 |
|
SU1728649A1 |
| ФАРА БЛИЖНЕГО СВЕТА ТРАНСПОРТНОГО УСТРОЙСТВА | 1994 |
|
RU2105924C1 |
