Изобретение относится к области контрольно-измерительной техники, а именно к средствам определения геометрических параметров поперечного сечения тел квазицилиндрической формы, преимущественно штамбов (для справки, штамб - это надземная часть растения между корнем и первой ветвью) саженцев и укорененных черенков садовых культур для оценки их качества.
При выполнении селекционных, научно-исследовательских и агротехнических работ в процессах промышленного возделывания садовых культур необходим инструментальный контроль качества готового продукта (черенков, саженцев). Одними из показателей развитости и качества растений являются геометрические параметры поперечного сечения штамба: поперечные размеры, длина контура, площадь, индекс формы (отношение максимального и минимального ортогональных поперечных размеров).
Для измерений поперечных размеров сечения штамба известны механические контактные устройства с механической или электронной шкалой, такие как штангенциркули и микрометры [ГОСТ Р 53135-2008. Посадочный материал плодовых, ягодных, субтропических, орехоплодных, цитрусовых культур и чая. Технические условия. - С. 38]. Процедура измерений контактными средствами характеризуется высокой трудоемкостью и низкой производительностью, связанными с ручной установкой измерительных губок и плоскостей до контакта с объектом контроля. Чтобы получить данные для определения площади поперечного сечения, необходимо измерить множество поперечных размеров сечения в разных направлениях. Кроме того, контакт с поверхностью контролируемых садовых культур осуществляют с определенным измерительным усилием, что приводит к деформации мягких тканей контролируемых объектов и, как следствие, к погрешностям измерений из-за изменения размеров объекта.
Известно устройство для определения параметров поперечного сечения тела, не вызывающее деформацию контролируемых растений и основанное на измерении объема участка штамба путем измерения электронными весами выталкивающей силы, возникающей в соответствии с законом Архимеда, и последующем вычислении диаметра и площади сечения цилиндра, эквивалентного по объему и высоте контролируемому участку штамба [патент РФ №2547439, МПК A01G 7/00, A01G 1/00. Устройство для определения геометрических параметров растений / В.В. Минеев, В.А. Золотарев, А.Ф. Алейников, В.Б. Морозов, А.С. Тихонов, О.В. Елкин, В.М. Фурзиков. - Заявка №2013122381/13, заявл. 14.05.2013, опубл. 10.04.2015, бюл. №10]. Устройство содержит горизонтальную платформу с установленными на ней электронными весами и вертикальным штативом, снабженным приспособлением для подвеса растений, сосуд с жидкостью, установленный на весах, датчик линейных перемещений приспособления для подвеса растений, которое выполнено в виде стрелы, жестко закрепленной в каретке, перемещающейся по направляющей вдоль штатива с помощью механического привода, и снабжено зажимом для закрепления растений, а также микропроцессорный измеритель геометрических параметров растений.
Достоинством устройства является расширение функциональных возможностей за счет дополнительного определения, кроме объема корней, также показателей развитости надземной части растений - площади поперечного сечения и диаметра штамба.
Недостатком устройства является наличие погрешности измерений объема участка штамба из-за всасывания жидкости пористыми тканями штамба.
Поэтому для контроля геометрических параметров садовых культур более предпочтительны бесконтактные средства, среди которых известно оптическое устройство для измерения диаметра поперечного сечения тела, основанное на теневом способе [патент РФ №2555497, МПК G01B 11/08. Устройство для измерения диаметра / В.В. Минеев, В.А. Золотарев, А.Ф. Алейников, В.Б. Морозов, В.М. Фурзиков. - Заявка №2014105249/28, заявл. 11.02.2014, опубл. 10.07.2015, бюл. №19]. Устройство содержит оптический датчик, состоящий из двух блоков - излучателя и приемника. Излучение полупроводникового лазера или светодиода коллимируется объективом. При размещении объекта контроля в области коллимированного пучка его теневое изображение сканируется линейкой ПЗС-фотоприемников или формируется телецентрической оптической системой на линейке ПЗС-фотоприемников. По положению теневых границ процессор рассчитывает диаметр объекта.
Недостатками устройства являются невозможность его применения для контроля поперечных размеров сечений, имеющих вогнутые участки, и то, что определяется только один параметр сечения тела - диаметр.
Наиболее близким аналогом изобретения (прототипом) по технической сущности является устройство с применением лазерных триангуляционных датчиков расстояний для определения комплекса геометрических параметров поперечного сечения тел квазицилиндрической формы, преимущественно саженцев и укорененных черенков садовых культур [патент РФ №2551264, МПК G01B 11/08. Способ определения геометрических параметров сечения тела и устройство для его осуществления / В.В. Минеев, В.А. Золотарев, А.Ф. Алейников, В.Б. Морозов. - Заявка №2013144512/28, заявл. 03.10.2013, опубл. 20.05.2015, бюл. №14].
Устройство (прототип) содержит два лазерных триангуляционных датчика расстояния, снабженных входами для внешнего запуска измерений и установленных на корпусе, имеющем форму скобы, на заданном расстоянии друг от друга таким образом, что их векторы измерений лежат на одной линии и направлены встречно, а также элемент, контролирующий перпендикулярность перемещения устройства относительно линии векторов измерений датчиков расстояний, датчик путевых синхроимпульсов, запускающий измерения датчиков расстояний, микропроцессорный измерительно-вычислительный блок и выполнено с возможностью перемещения относительно контролируемого тела так, чтобы линия векторов измерений находилась в плоскости контролируемого сечения и пересекала контур сечения в двух контрольных точках.
Достоинствами прототипа являются: высокие точность, быстродействие и разрешающая способность; тонкий видимый луч и небольшие размеры его измерительного пятна на объекте контроля; работа в сложных условиях эксплуатации; возможность работы с объектами различного цвета со сложной структурой поверхности.
Недостатком прототипа является необходимость применения двух лазерных триангуляционных датчиков для измерений расстояний до контрольных точек, что усложняет устройство и повышает его стоимость.
Техническим результатом изобретения является упрощение устройства для определения комплекса геометрических параметров поперечного сечения тел квазицилиндрической формы за счет выполнения измерений расстояний до контрольных точек на контуре сечения с помощью одного лазерного триангуляционного датчика.
Технический результат в изобретении достигается тем, что в устройство для определения комплекса геометрических параметров поперечного сечения тел квазицилиндрической формы, содержащее лазерный триангуляционный датчик расстояний, снабженный входом для внешнего запуска измерений и установленный вблизи поверхности тела так, чтобы его лазерный луч находился в плоскости контролируемого сечения и пересекал контур сечения в контрольных точках, и микропроцессорный измерительно-вычислительный блок, состоящий из микроконтроллера, модуля памяти, шифратора, кнопок управления, буквенно-цифрового жидкокристаллического индикатора и адаптера подключения к персональному компьютеру, при этом первый вход микроконтроллера подключен к модулю памяти, а второй вход соединен с выходом шифратора, входы которого соединены с кнопками управления, первый выход подключен к буквенно-цифровому жидкокристаллическому индикатору, а второй выход соединен с адаптером подключения к персональному компьютеру, введены приспособление для поворота контролируемого тела вокруг оси вращения, проходящей через центральную точку, находящуюся в пределах контролируемого поперечного сечения, перпендикулярно плоскости этого сечения, начиная от начального углового положения через каждые одинаковые угловые интервалы так, чтобы в пределах одного оборота их число было целым, преобразователь сигнала лазерного триангуляционного датчика расстояний в код, выход которого подключен к третьему входу микроконтроллера, вход запуска преобразования - к третьему выходу микроконтроллера, а измерительный вход - к выходу лазерного триангуляционного датчика расстояний, вход для внешнего запуска измерений которого соединен с четвертым выходом микроконтроллера, и персональный компьютер, вход которого подключен к выходу адаптера. Приспособление для поворота контролируемого тела состоит из шагового двигателя, установленного на горизонтальной платформе так, что на его валу, направленном вертикально вверх, одним концом закреплен П-образный держатель контролируемого тела, второй конец которого снабжен зажимом типа «прищепка» с полукруглыми губками для обхвата и удержания контролируемого тела в вертикальном положении, а также драйвера управления шаговым двигателем, при этом ось вращения шагового двигателя проходит между губками и совпадает с осью вращения контролируемого тела, вход драйвера подключен к пятому выходу микроконтроллера, а выход драйвера соединен с управляющим входом шагового двигателя. Лазерный триангуляционный датчик расстояний установлен на горизонтальной платформе на заданном регулируемом расстоянии от оси вращения контролируемого тела так, чтобы его лазерный луч попадал на контур контролируемого поперечного сечения тела выше губок зажима.
Такая совокупность названных признаков предлагаемого технического решения устройства позволяет, как и в прототипе, получить координаты множества контрольных точек на контуре поперечного сечения, но с использованием только одного лазерного триангуляционного датчика расстояний, и, соответственно, с помощью известных геометрических соотношений определить необходимый комплекс геометрических параметров поперечного сечения. То есть за счет того, что в предлагаемом устройстве осуществляется поворот квазицилиндрического тела и его поперечного сечения вокруг оси вращения, находящейся на заданном расстоянии от датчика расстояний и проходящей через центральную точку, находящуюся в пределах поперечного сечения, перпендикулярно плоскости этого сечения, обеспечивается возможность определения длин множества лучей, исходящих из этой центральной точки до точек пересечения (контрольных точек) с линией контура поперечного сечения, с использованием одного лазерного триангуляционного датчика расстояний, измеряющего расстояния до контрольных точек в направлениях, совпадающих с направлениями лучей, исходящих из центральной точки. А также, благодаря одинаковому заданному углу между лучами и их целому числу в пределах одного оборота, реализуется возможность представления координат контрольных точек в прямоугольной системе координат, приняв направление первого луча, исходящего из центральной точки, совпадающим с осью абсцисс, и дальнейшего вычисления геометрических параметров сечения тела измерительно-вычислительным блоком.
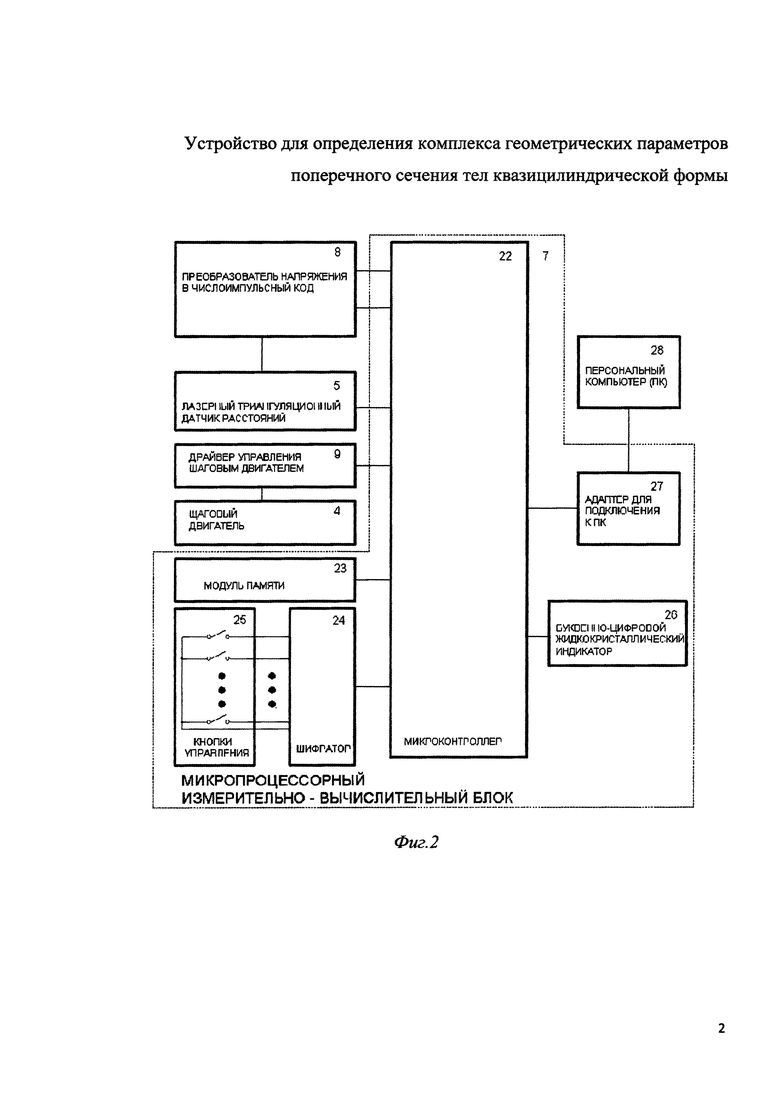
На фиг. 1 изображен рисунок, поясняющий конструкцию устройства для определения комплекса геометрических параметров поперечного сечения тела квазицилиндрической формы на примере саженца, на фиг. 2 - структурная схема устройства для определения комплекса геометрических параметров поперечного сечения тел квазицилиндрической формы.
Устройство для определения комплекса геометрических параметров поперечного сечения тела квазицилиндрической формы, например, штамба 1 саженца 2 садовой культуры содержит горизонтальную платформу 3, на которой установлен шаговый двигатель 4, лазерный триангуляционный датчик 5 расстояний (далее по тексту - датчик 5 расстояний) и электронный блок 6, состоящий из микропроцессорного измерительно-вычислительного блока 7, преобразователя 8 сигнала (например, напряжения) датчика 5 расстояний в код (например, числоимпульсный) (далее по тексту - преобразователь 8 напряжения в код) и драйвера 9 управления шаговым двигателем 4 (далее по тексту - драйвера 9). На валу 10 шагового двигателя 4, направленном вертикально вверх, закреплен конец 11 П-образного держателя 12 штамба 1 саженца 2 садовой культуры. На втором конце 13 П-образного держателя 12 закреплен зажим 14 типа «прищепка» с хвостовиками 15 и полукруглыми губками 16 для обхвата и удержания штамба 1 саженца 2 садовой культуры в вертикальном положении. Для более устойчивого и надежного удержания штамба 1 саженца 2 зажим 14 выполнен двойным, губки 16 которого снабжены приклеенными изнутри тонкими прокладками из мягкого материала (не показаны). Расстояние между концами 11 и 13 П-образного держателя 12 выбрано так, чтобы между ними свободно размещались корни саженца 2. Для уменьшения изгибающих усилий на вал 10 шагового двигателя 4 П-образный держатель 12 снабжен противовесами (не показаны). Ось 17 вращения вала 10 шагового двигателя 4 проходит между губками 16 и, при установленном в зажиме 14 саженце 2, совпадает с осью 18 вращения штамба 1 саженца 2. Датчик 5 расстояний установлен на такой высоте относительно горизонтальной платформы 3, чтобы его лазерный луч 19 попадал на контур 20 контролируемого поперечного сечения штамба 1 выше зажима 14 перпендикулярно оси 18 вращения штамба 1 и образовывал на нем измерительные пятна 21, являющиеся контрольными точками, а его воображаемое продолжение пересекало эту ось 18 в точке, являющейся центральной точкой контролируемого поперечного сечения. Микропроцессорный измерительно-вычислительный блок 7 с целью определения длин множества лучей, исходящих из центральной точки до измерительных пятен 21 (контрольных точек), и далее координат контрольных точек и геометрических параметров сечения штамба (длины контура, площади, максимального и минимального размеров в двух ортогональных направлениях и их отношения - индекса формы) состоит из микроконтроллера 22, модуля памяти 23, шифратора 24, кнопок управления 25, буквенно-цифрового жидкокристаллического индикатора 26 (далее по тексту - буквенно-цифрового ЖКИ 26) и адаптера 27 подключения к персональному компьютеру 28 (далее по тексту - адаптера 27 и ПК 28). Первый вход микроконтроллера 22 подключен к модулю памяти 23, а второй вход соединен с выходом шифратора 24, входы которого соединены с кнопками управления 25, первый выход подключен к буквенно-цифровому ЖКИ 26, а второй выход соединен с адаптером 27. Выход преобразователя 8 напряжения в код подключен к третьему входу микроконтроллера 22, вход запуска преобразования - к третьему выходу микроконтроллера 22, а измерительный вход - к выходу датчика 5 расстояний, вход для внешнего запуска измерений которого соединен с четвертым выходом микроконтроллера 22. Вход ПК 28 подключен к выходу адаптера 27. Вход драйвера 9 подключен к пятому выходу микроконтроллера 22, а выход драйвера 9 соединен с управляющим входом шагового двигателя 4.
Устройство для определения комплекса геометрических параметров поперечного сечения штамба 1 саженца 2 садовой культуры работает следующим образом. Перед началом измерений с помощью регулировок (не показаны) устанавливается расстояние между датчиком 5 расстояний и центральной точкой (или, что то же самое, расстояние между датчиком 5 расстояний и осью 18 вращения штамба 1 саженца 2), исходя из размеров контролируемого тела, а кнопкой управления 25 «ВКЛ» посредством шифратора 24, драйвера 9 и под управлением программы микроконтроллера 22 устройство включается и переводится в исходное состояние, при этом шаговый двигатель 4 устанавливается в начальное угловое положение, а на экране ПК 28 появляется запрос для ввода атрибутов объекта и режима измерений в модуль памяти 23: даты, порядкового номера и наименования саженца 2, значения расстояния между датчиком 5 расстояний и центральной точкой, шага углового интервала 1,8 или 3,6 градуса. После ввода атрибутов объекта и режима измерений кнопкой управления 25 «ПУСК» устройство переводится в режим «Работа». В этом режиме с четвертого выхода микроконтроллера 22 на вход для внешнего запуска измерений датчика 5 расстояний поступает команда на выполнение измерения расстояния до поверхности штамба 1 саженца 2 (до первого измерительного пятна 21) и с некоторой временной задержкой - команда на выполнение преобразования электрического напряжения датчика 5 расстояний в числоимпульсный код с третьего выхода микроконтроллера 22 на вход запуска преобразователя 8 напряжения в код. Далее числоимпульсный код с выхода преобразователя 8, несущий информацию об измеренном расстоянии, поступает на третий вход микроконтроллера 22, где под управлением программы последнего он преобразуется в двоично-десятичный код, на основании которого рассчитывается расстояние от центральной точки до первой контрольной точки, как разность между расстоянием от датчика 5 расстояний до центральной точки и измеренным расстоянием от датчика 5 расстояний до первой контрольной точки. Полученное числовое значение расстояния от центральной точки до первой контрольной точки отображается на экране буквенно-цифрового ЖКИ 26 и через адаптер 27 передается в ПК 28 для вычисления координат первой контрольной точки. После окончания первого измерения с пятого выхода микроконтроллера 22 на вход драйвера 9 управления шаговым двигателем 4 поступает команда на поворот вала на один шаг в соответствии с выбранным значением углового интервала 1,8 или 3,6 градуса. Далее с четвертого выхода микроконтроллера 22 на вход для внешнего запуска измерений датчика 5 расстояний поступает команда на выполнение следующего измерения расстояния до поверхности штамба 1 саженца 2 (до следующего измерительного пятна 21), и описанный выше цикл повторяется до тех пор, пока количество циклов не будет равно 200 или 100 соответственно выбранным угловым интервалам 1,8 или 3,6 градуса, а на экране буквенно-цифрового ЖКИ 26 не появится сообщение об окончании измерений и вычислений исходных параметров, при этом также включается специальный световой или звуковой индикатор (не показаны). После нажатия кнопки управления 25 «СТОП» устройство переводится в режим «Обработка», и на основе полученных исходных параметров программой ПК 28 рассчитываются координаты контрольных точек и геометрические параметры поперечного сечения штамба 1 саженца 2: длина контура, площадь, индекс формы (отношение максимального и минимального ортогональных поперечных размеров).
Координаты контрольных точек рассчитываются следующим образом.
Центральную точку принимают за начало прямоугольной системы координат, полученное числовое значение расстояния от центральной точки до первой контрольной точки откладывают от начала системы координат на оси абсцисс и координаты конца отрезка принимают за координаты первой контрольной точки, координаты остальных контрольных точек получают аналогично путем откладывания числовых значений расстояний от центральной точки до соответствующих контрольных точек на лучах, исходящих из начала координат под соответствующими углами относительно оси абсцисс, кратными выбранному шагу углового интервала 1,8 или 3,6 градуса. Длина контура 20 поперечного сечения определяется по формулам аналитической геометрии как сумма длин прямых линий между всеми соседними контрольными точками. Площадь поперечного сечения определяется как сумма всех элементарных площадей секторов круга, центральный угол которых равен выбранному шагу углового интервала 1,8 или 3,6 градуса, и радиусы R каждого из которых равны среднему арифметическому значению двух расстояний от центральной точки до каждой из двух соседних контрольных точек. Площадь сектора круга S вычисляется по известному геометрическому соотношению площади S и радиуса R сектора круга:
S=πR2/N,
где
S - площадь единичного сектора круга;
π - число, равное 3,14;
R - радиус единичного сектора круга;
N - количество секторов в круге 200 или 100 при выбранном шаге углового интервала 1,8 или 3,6 градуса соответственно.
Для вычисления индекса формы за максимальный размер принимается длина наибольшего отрезка из множества отрезков между всеми возможными парами контрольных точек, за минимальный - сумма максимального расстояния от этого наибольшего отрезка до контрольных точек, лежащих по одну сторону от него, и максимального расстояния от этого наибольшего отрезка до контрольных точек, лежащих по другую сторону от него.
Полученные геометрические параметры поперечного сечения штамба 1 саженца 2 с его атрибутами отображаются на экране персонального компьютера 28 и сохраняются в файле его памяти (например, жестком диске).
Для осуществления изобретения могут быть использованы следующие компоненты:
датчик LS5 НПП «ПРИЗМА» [URL:http://www.prizmasensors.ru] - в качестве лазерного триангуляционного датчика 5 расстояний;
шаговый двигатель 4 PL42H34-D5 [URL:http://www.purelogic.ru];
драйвер 9 управления шаговым двигателем PLD230 [URL:http://www.purelogic.ru];
микросхема PIC16F876 [URL:http://www.rudatasheet.ru] - для микроконтроллера 22;
микросхема AD654 [URL:http://www.datasheet4u.com] - для преобразователя 8 сигнала напряжения датчика 5 расстояний в числоимпульсный код;
микросхема 74НС148 [URL:http://www.alldatasheet.com] - для шифратора 24;
микросхема FM24C64 [URL:http://www.alldatasheet.com] - для модуля памяти 23;
микросхема MAX232N [URL:http://www.alldatasheet.com] - для адаптера 27 подключения к ПК 28;
индикатор FECC1602D-FLYYBW-65SR [URL:http://www.di-em.ru] - для буквенно-цифрового ЖКИ 26.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА ПАРАМЕТРОВ ПОПЕРЕЧНОГО СЕЧЕНИЯ ТЕЛ КВАЗИЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 2016 |
|
RU2645002C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ СЕЧЕНИЯ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2551264C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАМЕТРА | 2014 |
|
RU2555497C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ РАСТЕНИЙ | 2013 |
|
RU2547439C2 |
| Способ регистрации координат дефектов элементов летательных аппаратов типа тел вращения | 2021 |
|
RU2758394C1 |
| Мобильный сканер для определения качества поверхности сварного шва | 2016 |
|
RU2644617C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ДВИЖУЩИХСЯ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 2024 |
|
RU2837941C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ДВИЖУЩЕЙСЯ КОЛЕСНОЙ ПАРЫ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2023 |
|
RU2818377C1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ РЕЗЬБЫ | 2006 |
|
RU2311610C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ СТАЛЬНОГО ЛИСТА, ДВИЖУЩЕГОСЯ ПО РОЛЬГАНГУ, И ЛАЗЕРНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2621490C1 |

Изобретение относится к области контрольно-измерительной техники и может использоваться для определения комплекса геометрических параметров поперечного сечения тел квазицилиндрической формы, в частности саженцев и укорененных черенков садовых культур. Заявленное устройство содержит лазерный триангуляционный датчик расстояний, установленный вблизи поверхности тела так, чтобы его лазерный луч находился в плоскости сечения и пересекал контур сечения в контрольных точках, микропроцессорный измерительно-вычислительный блок, приспособление для поворота тела вокруг оси вращения, проходящей через центральную точку, находящуюся в пределах поперечного сечения, перпендикулярно плоскости этого сечения, начиная от начального углового положения через каждые одинаковые угловые интервалы так, чтобы в пределах одного оборота их число было целым, преобразователь сигнала датчика расстояний в код и персональный компьютер. Датчик расстояний установлен на заданном регулируемом расстоянии от оси вращения контролируемого тела. Измерения расстояний до контрольных точек осуществляются через каждые одинаковые угловые интервалы. Таким образом, реализуется возможность определения множества расстояний от центральной точки до контрольных точек, расположенных по всему контуру сечения, представления координат контрольных точек в прямоугольной системе координат и вычисления геометрических параметров сечения тела измерительно-вычислительным блоком. Технический результат - упрощение устройства за счет выполнения измерений расстояний до контрольных точек на контуре сечения с помощью одного лазерного триангуляционного датчика расстояний. 2 з.п. ф-лы, 2 ил.
1. Устройство для определения комплекса геометрических параметров поперечного сечения тел квазицилиндрической формы, содержащее лазерный триангуляционный датчик расстояний, снабженный входом для внешнего запуска измерений и установленный вблизи поверхности тела так, чтобы его лазерный луч находился в плоскости контролируемого сечения и пересекал контур сечения в контрольных точках, и микропроцессорный измерительно-вычислительный блок, состоящий из микроконтроллера, модуля памяти, шифратора, кнопок управления, буквенно-цифрового жидкокристаллического индикатора и адаптера подключения к персональному компьютеру, при этом первый вход микроконтроллера подключен к модулю памяти, а второй вход соединен с выходом шифратора, входы которого соединены с кнопками управления, первый выход подключен к буквенно-цифровому жидкокристаллическому индикатору, а второй выход соединен с адаптером подключения к персональному компьютеру, отличающееся тем, что в него введены приспособление для поворота контролируемого тела вокруг оси вращения, проходящей через центральную точку, находящуюся в пределах контролируемого поперечного сечения, перпендикулярно плоскости этого сечения, начиная от начального углового положения через каждые одинаковые угловые интервалы так, чтобы в пределах одного оборота их число было целым, преобразователь сигнала лазерного триангуляционного датчика расстояний в код, выход которого подключен к третьему входу микроконтроллера, вход запуска преобразования - к третьему выходу микроконтроллера, а измерительный вход - к выходу лазерного триангуляционного датчика расстояний, вход для внешнего запуска измерений которого соединен с четвертым выходом микроконтроллера, и персональный компьютер, вход которого подключен к выходу адаптера.
2. Устройство по п. 1, отличающееся тем, что приспособление для поворота контролируемого тела состоит из шагового двигателя, установленного на горизонтальной платформе так, что на его валу, направленном вертикально вверх, одним концом закреплен П-образный держатель контролируемого тела, второй конец которого снабжен зажимом типа «прищепка» с полукруглыми губками для обхвата и удержания контролируемого тела в вертикальном положении, а также драйвера управления шаговым двигателем, при этом ось вращения шагового двигателя проходит между губками и совпадает с осью вращения контролируемого тела, вход драйвера подключен к пятому выходу микроконтроллера, а выход драйвера соединен с управляющим входом шагового двигателя.
3. Устройство по п. 1, отличающееся тем, что лазерный триангуляционный датчик расстояний установлен на горизонтальной платформе на заданном регулируемом расстоянии от оси вращения контролируемого тела так, чтобы его лазерный луч попадал на контур контролируемого поперечного сечения тела выше губок зажима.
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ СЕЧЕНИЯ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2551264C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| US 4015366 A1, 07.09.1982 | |||
| US 6404506 B1, 11.06.2002 | |||
| СПОСОБ КОНТРОЛЯ ДИАМЕТРОВ ДЕТАЛИ | 2005 |
|
RU2301968C1 |

