Предлагаемый движитель имеет целью получить вертикальный  и горизонтальное передвижение летательного аппарата.
и горизонтальное передвижение летательного аппарата.
На фиг. 1 изображен вид спереди предлагаемого движителя, на фиг. 2 - вид его в плане и на фиг. 3 - приспособления для изменения наклона главного вала.
Моторы М внутреннего сгорания аэропланного типа приводят во вращение при помощи винтовой передачи вертикальный пустотелый вал W, на который насажены радиальные спицы (оси) R (на чертеже таких осей 6). Эти радиальные спицы оканчиваются подшипниками S для осей V, которые при помощи ступиц U скреплены с цилиндрами А. Цилиндры сделаны из тонких железных листов, которые для жесткости скреплены внутри кругами и продольными стержнями из таврового железа. При вращении вала W вращаются вместе с ним и вокруг него, благодаря радиальным спицам R, и цилиндры А. Кроме этого движения, цилиндры, вследствие применения валика K, вращаются также вокруг своих осей V. Валики K вращаются свободно в подшипниках, прикрепленных к спицам R. При перемещении спиц R, насаженные на них зубчатые колеса Z катятся по неподвижному зубчатому колесу Z1 и сообщают вращение валику K. Это вращение передается через посредство конических колес осям V цилиндров А. Скорость вращения цилиндров вокруг своих осей V в три раза больше средней скорости цилиндров вокруг вала W. Оси V цилиндров образуют определенный угол со спицами (осями) R. Величина этого угла определяется, исходя из следующих соображений: разные точки поверхности цилиндров находятся на разных расстояниях от вала W и, следовательно, имеют разные скорости, а вместе с ними, разные скорости будут иметь и прилегающие частицы воздуха, вследствие чего возникает разность давления между этими частицами, создающая дополнительное перемещение воздуха, главным образом, вдоль цилиндров (дополнительное перемещение воздуха вдоль окружности цилиндров совпадает с главным воздушным потоком, образуемым вращением цилиндров вокруг вала W, и поэтому никаких вредных последствий не создает). Это дополнительное перемещение воздуха отрывает частицы поверхностного слоя и этим уничтожает непрерывность главного, созданного вращением вокруг вала W цилиндров, воздушного потока. При наклонном же к спице R положении цилиндров, движение последних вокруг вала W, нормальное к спице R, разлагается на два движения: 1) нормальное к оси цилиндра и поэтому совпадающее с созданным движением цилиндра главным воздушным потоком и 2) вдоль оси, совпадающее с дополнительным перемещением воздуха, вызванным разностью скоростей. Можно подобрать всегда такой угол между осью V цилиндра и спицей R, чтобы слагаемая по оси V скорости перемещения цилиндра вокруг оси W была равна скорости дополнительного перемещения вдоль оси V воздуха (эта скорость определяется на основании теоремы Бернули). Отрыв частиц поверхностного слоя при этом уже не произойдет, следовательно, сохранится непрерывность главного потока.
Подпятник главного вала W прикреплен к площадке D, на которой поставлены моторы М. Площадка D может вращаться вокруг горизонтального валика ∂, подшипники которого укреплены на опоре D1, к которой прикрепляется шасси аппарата. Подпирающая стойка F прикреплена к площадке D и свободно сидит на валике ∂. В части ниже валика ∂ опорная стойка оканчивается храповиком х, зубья которого расположены симметрично по обе стороны вертикальной оси; плоские основания всех зубьев обращены вниз. Справа и слева эту стойку F подпирают два кулачка q и q1, закрепленные соответственно на валиках t и t1. При помощи пружин эти валики, следовательно, и кулачки, удерживаются в постоянном положении и, будучи отклонены, стремятся вернуться в начальное положение. Две собачки y1 захватывают зубья храповика х только тогда, когда получает наклон площадка D; когда площадка D наклоняется влево, зубец храповика х захватывается правой собачкой y1, и обратно. Храповики i и i сидят на одном валу t или t1 с соответственным кулачком и служат для удержания кулачков в новом положении при отклонении кулачка q влево или q1 вправо. После удаления собачек от соответствующего храповика, кулачок своей пружиной приводится в начальное положение. Для увеличения  силы и плавности к шасси прикрепляются 2 аппарата: один спереди, другой сзади; кроме того, устанавливают несколько параллельных рядов цилиндров (на чертеже 2 ряда). Подшипники осей этих цилиндров, а также винтовые зацепления для вращения цилиндров вокруг их осей V прикрепляются к стержням R1, прикрепленным к концам радиальных спиц R.
силы и плавности к шасси прикрепляются 2 аппарата: один спереди, другой сзади; кроме того, устанавливают несколько параллельных рядов цилиндров (на чертеже 2 ряда). Подшипники осей этих цилиндров, а также винтовые зацепления для вращения цилиндров вокруг их осей V прикрепляются к стержням R1, прикрепленным к концам радиальных спиц R.
При  площадка D имеет горизонтальное положение, а вал W и подпирающая стойка F - вертикальное. Кулачки q и q1 удерживают эту стойку F в вертикальном положении. При пуске в ход моторов М, начинают вращаться цилиндры вокруг вала W, а также вокруг своих осей V, благодаря чему образуется вертикальная сила, подымающая цилиндры, а с ними и весь аппарат и шасси вверх. Для перехода от вертикального
площадка D имеет горизонтальное положение, а вал W и подпирающая стойка F - вертикальное. Кулачки q и q1 удерживают эту стойку F в вертикальном положении. При пуске в ход моторов М, начинают вращаться цилиндры вокруг вала W, а также вокруг своих осей V, благодаря чему образуется вертикальная сила, подымающая цилиндры, а с ними и весь аппарат и шасси вверх. Для перехода от вертикального  к горизонтальному движению, напр., влево, отклоняют на некоторый угол влево кулачок q. Так как цилиндры в каждом аппарате расположены не симметрично (или число цилиндров нечетное, или расстояние между цилиндрами не одинаково), то давление воздуха на цилиндры одного и того же аппарата не уравновешивается и, в зависимости от положения цилиндров, получается равнодействующее давление попеременно то влево, то вправо, при чем в обоих аппаратах эти равнодействующие всегда равны и противоположны. При
к горизонтальному движению, напр., влево, отклоняют на некоторый угол влево кулачок q. Так как цилиндры в каждом аппарате расположены не симметрично (или число цилиндров нечетное, или расстояние между цилиндрами не одинаково), то давление воздуха на цилиндры одного и того же аппарата не уравновешивается и, в зависимости от положения цилиндров, получается равнодействующее давление попеременно то влево, то вправо, при чем в обоих аппаратах эти равнодействующие всегда равны и противоположны. При  эти давления принимает на себя попеременно то правый, то левый кулачок, но, как только левый кулачок q в обоих аппаратах отклонен влево, эти равнодействующие давления отклоняют около валика K влево площадки D, а вместе с ними и аппараты.
эти давления принимает на себя попеременно то правый, то левый кулачок, но, как только левый кулачок q в обоих аппаратах отклонен влево, эти равнодействующие давления отклоняют около валика K влево площадки D, а вместе с ними и аппараты.  сила уже не вертикальная и дает горизонтальное слагаемое, сообщающее поступательное горизонтальное движение влево аппарату и шасси. Для прекращения поступательного движения и перехода на
сила уже не вертикальная и дает горизонтальное слагаемое, сообщающее поступательное горизонтальное движение влево аппарату и шасси. Для прекращения поступательного движения и перехода на  или остановки на месте отнимают собачку y1 (правую) от храповика х и собачку z от храповика i (левого). Равнодействующее давление воздуха на цилиндры вправо выпрямит площадку D. Стойка F вновь упрется о кулачок q1, кулачок же своей пружиной приводится в начальное положение до касания со стойкой F. Поступательное движение вправо получается поворотом вправо кулачка q1. По мере возрастания поступательной скорости увеличивается
или остановки на месте отнимают собачку y1 (правую) от храповика х и собачку z от храповика i (левого). Равнодействующее давление воздуха на цилиндры вправо выпрямит площадку D. Стойка F вновь упрется о кулачок q1, кулачок же своей пружиной приводится в начальное положение до касания со стойкой F. Поступательное движение вправо получается поворотом вправо кулачка q1. По мере возрастания поступательной скорости увеличивается  сила производимого действием ветра, образуемого поступательным движением аппарата на цилиндры, поэтому уменьшается работа моторов, которая идет, главным образом, только на преодоление получаемых при поступательном движении сопротивлений. При установившемся движении получается следующее: при движении влево, наклонена влево площадка D, а с ней и весь аппарат, поэтому некоторые цилиндры движутся вниз и против созданного поступательным движением ветра, а другие вверх и по ветру. Первые цилиндры требуют работу моторов, имеют большую, почти горизонтальную относительную скорость и создают поэтому большую
сила производимого действием ветра, образуемого поступательным движением аппарата на цилиндры, поэтому уменьшается работа моторов, которая идет, главным образом, только на преодоление получаемых при поступательном движении сопротивлений. При установившемся движении получается следующее: при движении влево, наклонена влево площадка D, а с ней и весь аппарат, поэтому некоторые цилиндры движутся вниз и против созданного поступательным движением ветра, а другие вверх и по ветру. Первые цилиндры требуют работу моторов, имеют большую, почти горизонтальную относительную скорость и создают поэтому большую 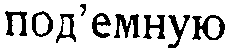 силу. Цилиндры же, идущие вверх по ветру, помогают работе моторов и имеют значительно меньшую относительную скорость, образующую небольшую силу вниз и большую горизонтальную силу по направлению поступательного движения, служащую для преодоления сопротивлений, образуемых при поступательном движении.
силу. Цилиндры же, идущие вверх по ветру, помогают работе моторов и имеют значительно меньшую относительную скорость, образующую небольшую силу вниз и большую горизонтальную силу по направлению поступательного движения, служащую для преодоления сопротивлений, образуемых при поступательном движении.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ФОТОГРАФИЧЕСКИЙ АППАРАТ | 1929 |
|
SU18033A1 |
| Ведущий механизм к врубовым машинам | 1932 |
|
SU40804A1 |
| Машина для упаковки в бумагу штучных изделий, например, марлевых бинтов | 1956 |
|
SU107696A1 |
| Сельфактор | 1933 |
|
SU38462A1 |
| АППАРАТ ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ ФОТОЭЛЕКТРОФОРЕЗОМ | 1973 |
|
SU404290A1 |
| Станок для нарезания зубьев на гребенках | 1934 |
|
SU39968A1 |
| Автоматический станок для изготовления пружин с витками удлиненной формы | 1943 |
|
SU65264A1 |
| УСТРОЙСТВО ДЛЯ СМЕСКИ ШЕРСТИ | 1930 |
|
SU21751A1 |
| Машина для печатания, например, ярлыков на ткани | 1953 |
|
SU98323A1 |
| Машина для образования на кромках тканей бахромы | 1932 |
|
SU34689A1 |
Движитель для летательного аппарата с вращаемыми цилиндрами, характеризующийся тем, что оси V вращающихся цилиндров А (фиг. 1 и 2), с целью наилучшего использования потока среды, установлены под углом к спицам R, укрепленным на главном вертикальном валу W, имеющем неподвижную коническую зубчатку Z1, сцепленную с таковыми же зубчатками Z, укрепленными на валиках k, служащих передачею для вращения осей V, скрепленных со ступицами и цилиндров А, каковой вал W и вращающие его моторы М установлены на площадке D, укрепленной на горизонтальном валике ∂, вращательно установленном на опоре D1 шасси аппарата и служащем для изменения угла наклона вала W при переходе от вертикального к горизонтальному полету, с каковою целью упомянутый валик ∂, а также установленные на той же опоре D1 валики t и t1 снабжены приспособлениями, управляемыми с места пилота и состоящими из храповиков x и i с собачками y1 и Z и кулачков q и q1, подпирающих стойку F площадки D и удерживаемых в требуемом положении пружинами.
