Данное устройство относится к приборным системам стабилизации и слежения.
Оно может применяться при широком диапазоне изменения добротности или отладке однотипных систем.
Известны следящие системы, в которых с целью упрощения усилителей, исключения сложных преобразователей и повышения надежности используется электромеханическая коррекция инерционным демпфером магнитного или жидкостного типа. Выбирая конструктивные параметры демпферов с учетом параметров исполнительного двигателя можно обеспечить показатель колебательности Ai и добротность К в конкретной системе.
Для этих схе.м с демпферами характерна негибкость и сложность изменения постоянных времени, так как демпфирование в системе не меняется. При построении следящих систем с различными частотными диапазонами необходимы различные инерционные демпферы.
Предлагаемая следящая система отличается тем, что в ней демифер выполнен в виде электромагнитной вихревой муфты, обмотка которой подключена к блоку управления, а инерционная масса демпфера укреплена на выходном валу муфты.
рактеристики системы под конкретные условия работы.
Как известно пз теории следящих систем с инерционным демпфированием, кратность граничных частот Л диапазона частот, в котором проявляется демпфирование, определяется отношением суммы приведенного момента инерции двигателя /д и момента инерции маховика /м к приведенному моменту
- , 1д+ инерции двигателя, т. е. « ,-- рас1л
положение этого диапазона определяется коэффициентом вязкого трения демпфера Дд,. При фиксированном Л и коэффициенте усиления разомкнутой системы (добротности) /( существует оптимальное расположение Л. при котором показатель колебательности М замкнутой системы минимален:
Л1 ДТо
Значение /дм , обеспечивающее минимальный показатель колебательности , связано последним и с / выражением
f -/. I/A:2
Т )и7ЩГ где TI постоянная времени двигателя с учетом маховика.
изменении К необходимо изменять вязкое трение в демпфере в зависимости от добротности по квадратичному закону.
Можно также использовать другие критерии для изменения демпфирования, в частности критерий поддержания максимального значения запаса по фазе.
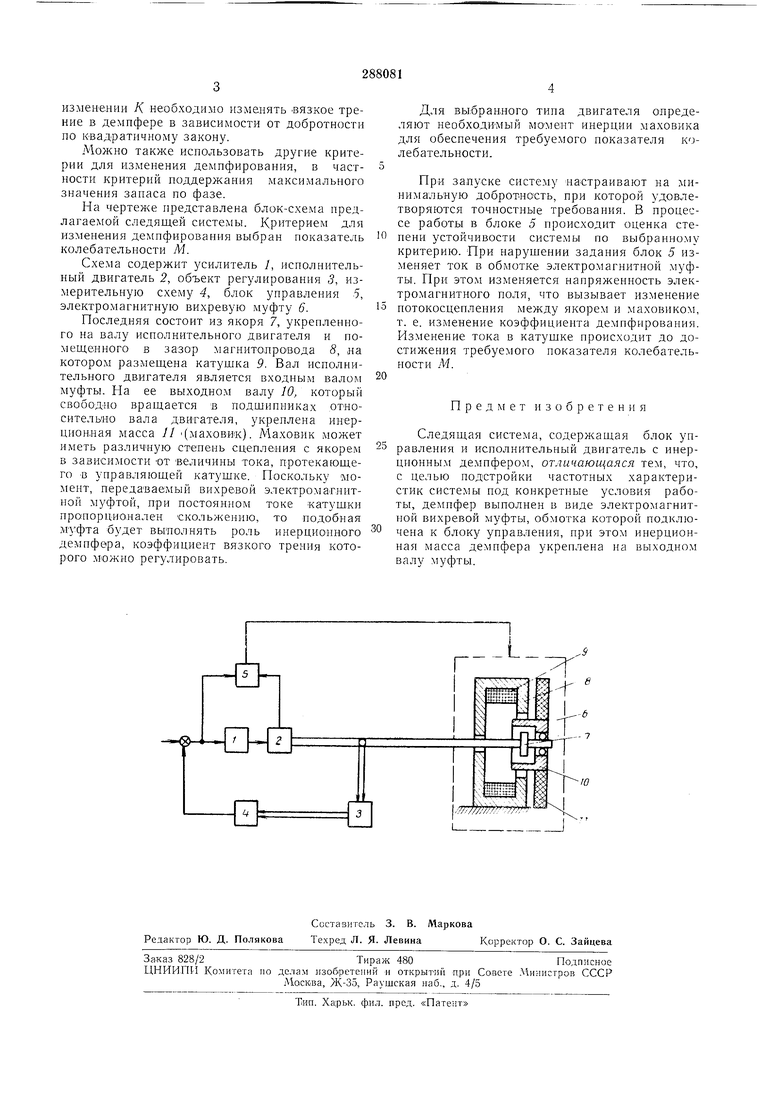
На чертеже представлена блок-схема предлагаемой следящей системы. Критерием для изменения демпфирования выбран показатель колебательности М.
Схема содержит усилитель 1, исполнительный двигатель 2, объект регулирования 5, измерительную схему 4, блок управления 5, электромагнитную вихревую муфту 6.
Последняя состоит из якоря 7, укрепленного на валу исполнительного двигателя и помещенного в зазор магнитолровода 8, на котором размещена катушка 9. Вал исполнительного двигателя является входным валом муфты. На ее выходном валу 10, который свободно вращается в подшипниках относительно вала двигателя, укреплена инерционлая масса 11 (маховик). Маховик может иметь различную степень сцепления с якорем в зависимости от величины тока, протекающего в управляющей катушке. Носкольку момент, передаваемый вихревой электромагнитной муфтой, при постоянном токе катушки прО порпионален скольжению, то подобная муфта будет выполнять роль инерционного демпфера, коэффициент вязкого трення которого можно регулировать.
Для выбранного тина двигателя определяют необходимый момент инерции маховика для обеспечения требуемого иоказателя колебательности.
Нри запуске систему настраивают на минимальную добротность, при которой удовлетворяются точностные требования. В процессе работы в блоке 5 происходит оценка степени устойчивости системы по выбранному критерию. При нарушении задания блок 5 изменяет ток в обмотке электромагнитной муфты. При этом изменяется напряженность электромагнитного поля, что вызывает изменение потокосцепления между якорем и маховиком, т. е. изменение коэффициента демпфирования. Изменение тока в катушке происходит до достижения требуемого показателя колебательности М.
Предмет изобретения
Следящая система, содержащая блок управления и исполнительный двигатель с инерционным демпфером, отличающаяся тем, что, с целью подстройки частотных характеристик системы под конкретные условия работы, демпфер выполнен в виде электромагнитной вихревой муфты, обмотка которой подключена к блоку управления, при этом инерционная масса демпфера укреплена на выходном валу муфты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования вращательного движения в поступательное | 1978 |
|
SU792499A1 |
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА С УПРУГИМИ ВЫНОСНЫМИ ЭЛЕМЕНТАМИ | 1992 |
|
RU2020112C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2020113C1 |
| АНДРОГИННЫЙ ПЕРИФЕРИЙНЫЙ АГРЕГАТ СТЫКОВКИ (АПАС) И ДЕМПФЕР АМОРТИЗАЦИОННО- ПРИВОДНОЙ СИСТЕМЫ ДЛЯ НЕГО | 1998 |
|
RU2131829C1 |
| ПОРШНЕВАЯ РЕЗОНАНСНАЯ МАШИНА | 2004 |
|
RU2274755C1 |
| Следящая система | 1977 |
|
SU750424A1 |
| СИЛОВОЙ ДВУХСТЕПЕННЫЙ УПРАВЛЯЮЩИЙ ГИРОСКОП | 1984 |
|
SU1839931A1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА | 1997 |
|
RU2110435C1 |
| СПОСОБ ДИНАМИЧЕСКОГО МОНИТОРИНГА ВЫСОКОМОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745382C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ОСЕВОЙ НАГРУЗКИ В КОМПОНОВКЕ БУРИЛЬНОЙ КОЛОННЫ | 2020 |
|
RU2778910C2 |
