Предлагаемое изобретение относится к области совершенствования поршневых машин, таких как поршневые компрессоры, карбюраторные двигатели, дизели и др.
В технике широко используется явление резонанса. Как известно, при резонансе в машине, где используется это явление, любая заданная амплитуда колебаний достигается при минимальном силовом воздействии со стороны возбудителя колебаний (привода). Количество энергии, полезно расходуемой на выполнение технологического процесса, определяет эффективность машины, а соотношение этой энергии и энергии, рассеиваемой в колебательной системе и приводе, - коэффициент полезного действия (КПД) машины. Таким образом, КПД машины в резонансном режиме выше, чем в нерезонансном.
Известны вибрационные машины с силовым и кинематическим возбуждением, содержащие механизмы, преобразующие непрерывное вращение валопровода в резонансные колебания колебательной системы, связанной некоторым образом с валопроводом. (1. Динамика машин и управление машинами. /В.К.Асташев, В.И.Бабицкий, И.И.Вульфсон и др.; Под ред. Г.В.Крейнина. - М.: Машиностроение, 1988. - с.с.177, 182). Это наиболее близкие аналоги, в которых используется явление резонанса, известные авторам.
Многие традиционно использующиеся поршневые машины с шатунно-кривошипными механизмами (2. Яманин А.И., Жаров А.В. Динамика поршневых двигателей. - М.: Машиностроение, 2003. - 464 с. 3. Козловский М.З. Динамика машин. - Л.: Машиностроение, 1989. - 263 с. 4. Пластинин П.И. Поршневые компрессоры. Том 1. Теория и расчет. - М.
Технический результат заключается в обеспечении автоматического поддержания в поршневой машине резонансного режима. Этому режиму будет соответствовать минимум коэффициента неравномерности угловой скорости вращения вала поршневой машины, что определяет минимум динамической ошибки по угловой скорости.
Технический результат достигается тем, что поршневая резонансная машина с кривошипно-шатунным механизмом содержит маховик с переменным моментом инерции, муфтой, грузами и системой рычагов, предназначенные для плавного изменения момента инерции колебательной системы, датчик угловой скорости вращения вала, датчик температуры окружающей среды, датчик барометрического давления окружающей среды, датчик положения муфты маховика с переменным моментом инерции, микропроцессорную систему управления, блок задания закона перемещения муфты маховика с переменным моментом инерции; микропроцессорная система управления в свою очередь содержит блок с математической моделью работы поршневой резонансной машины, первый блок сравнения, второй блок сравнения; причем выходные сигналы датчика угловой скорости вращения вала, датчика температуры окружающей среды, датчика барометрического давления окружающей среды, датчика положения муфты маховика с переменным моментом инерции подают на входы блока с математической моделью работы поршневой резонансной машины; на первый вход первого блока сравнения подают рассчитанное значение угловой скорости вращения вала поршневой машины, соответствующее резонансному режиму при данных измеренных значениях температуры и барометрического давления окружающего воздуха, а на второй вход первого блока сравнения - выходной сигнал датчика угловой скорости вращения вала; на первый вход второго блока сравнения подают рассчитанное значение положения муфты маховика с переменным моментом инерции, соответствующее резонансному режиму при данных измеренных значениях температуры и барометрического давления окружающего воздуха, а также для данного резонансного значения угловой скорости вращения вала поршневой машины, а на второй вход второго блока сравнения - выходной сигнал датчика положения муфты маховика с переменным моментом инерции; с выходов первого и второго блоков сравнения подают сигналы на входы соответственно первого и второго исполнительно-регулирующих устройств, плавно изменяющих скорость вращения вала поршневой машины и положение муфты маховика с переменным моментом инерции до выполнения условия минимума коэффициента неравномерности вращения вала поршневой машины, причем выполнение этого условия означает, что поршневая машина настроена на резонансный режим; на вход блока задания закона перемещения муфты маховика с переменным моментом инерции подают сигнал с выхода микропроцессорной системы управления, а выходной сигнал этого блока подают на вход второго блока сравнения.
Изобретение поясняется графическими изображениями, где:
фиг.1 - схема колебательной системы с грузом и двумя механическими пружинами;
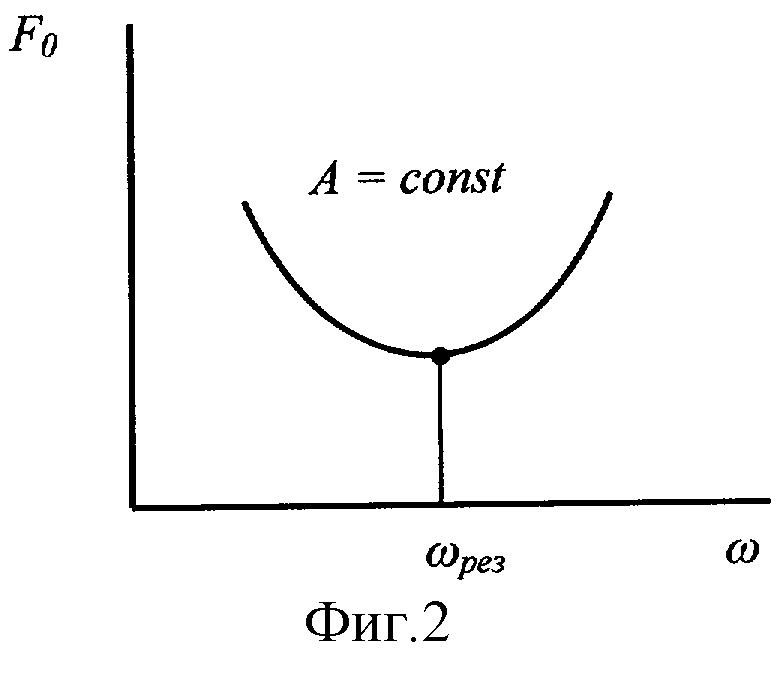
фиг.2 - зависимость амплитуды возмущающей силы в функции угловой частоты при постоянном значении амплитуды колебаний груза;
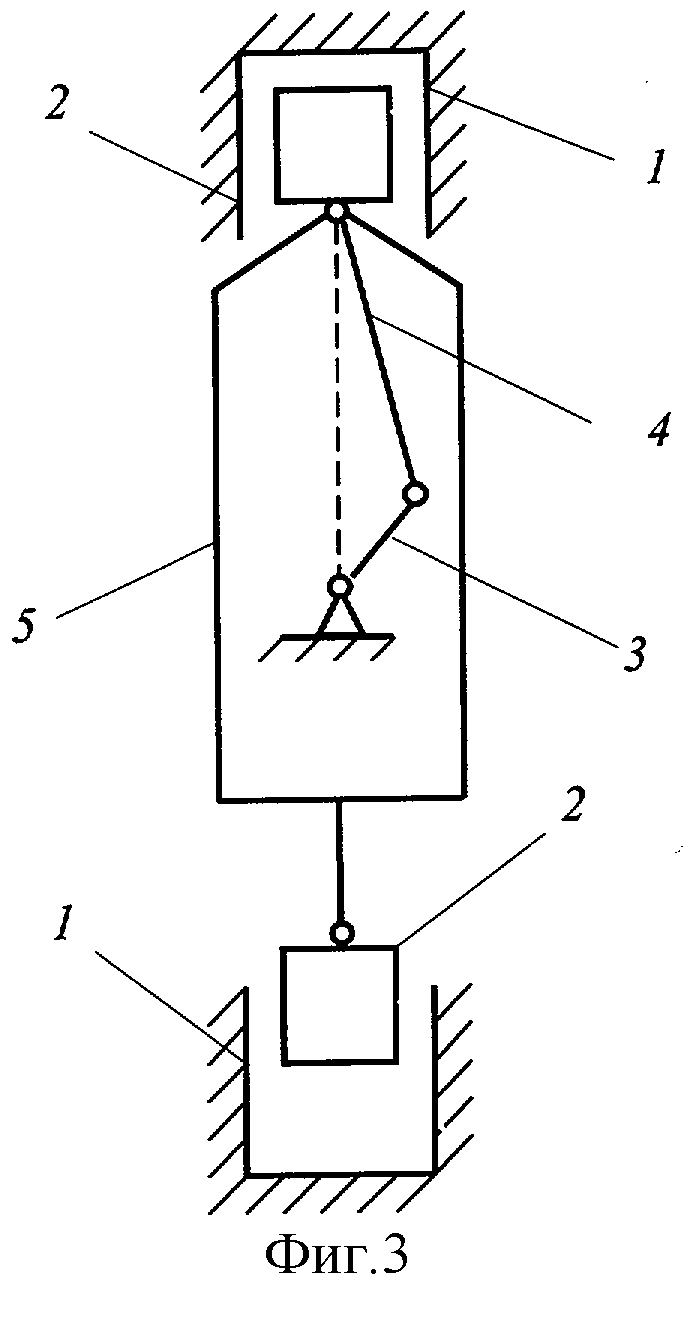
фиг.3 - кинематическая схема поршневого двигателя двустороннего действия;
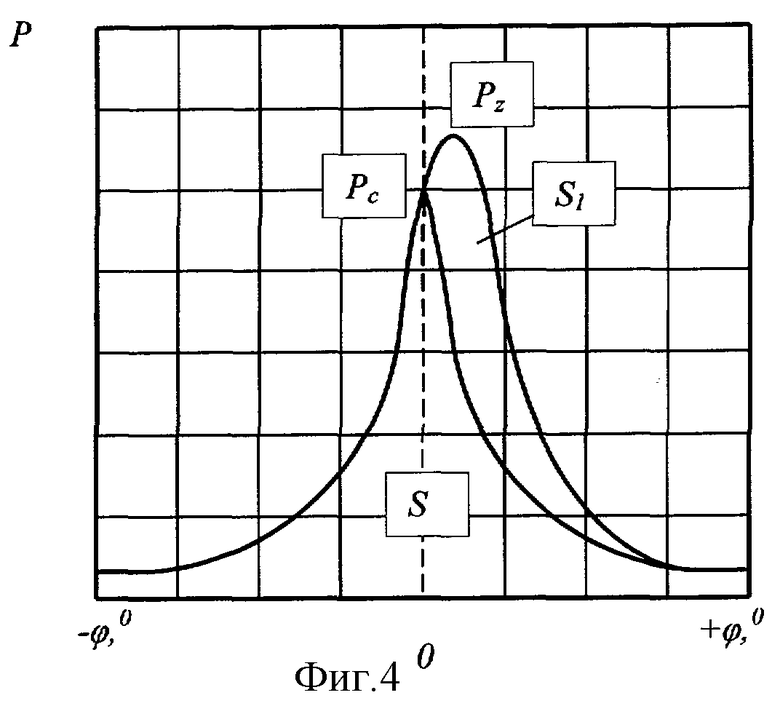
фиг.4 - индикаторная диаграмма поршневого двигателя двустороннего действия;
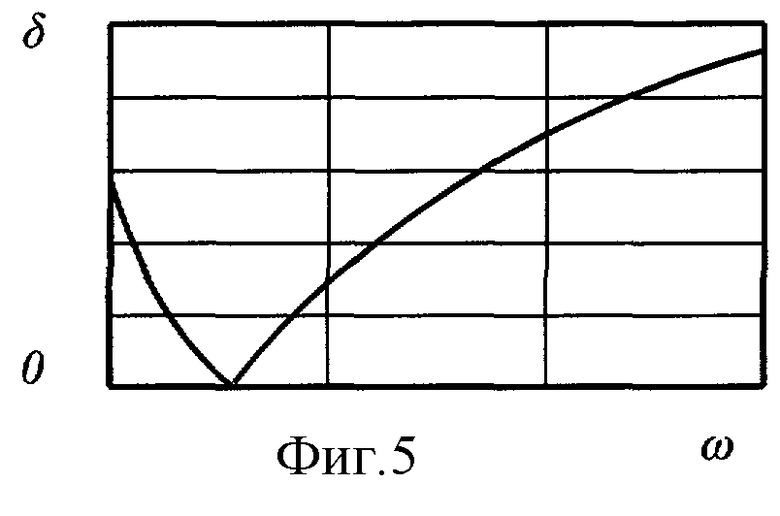
фиг.5 - коэффициент неравномерности угловой скорости вращения коленчатого вала в функции угловой скорости вращения коленчатого вала;
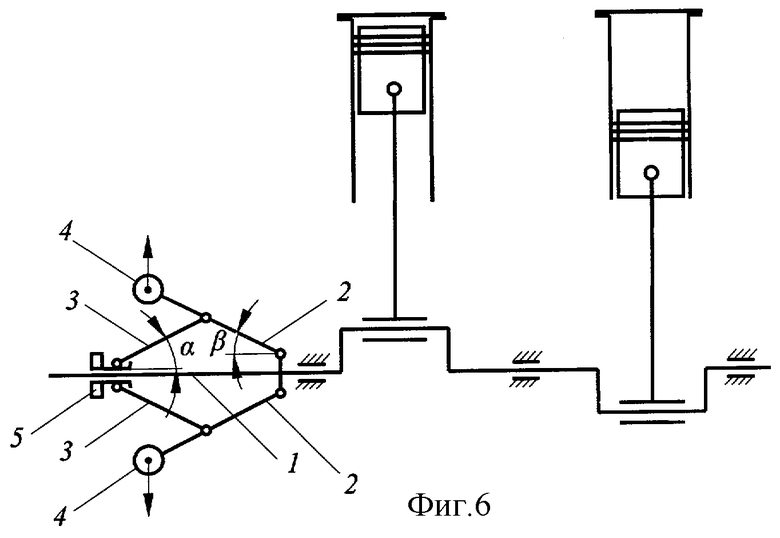
фиг.6 - вид сбоку поршневой резонансной машины с уравновешивающим устройством;
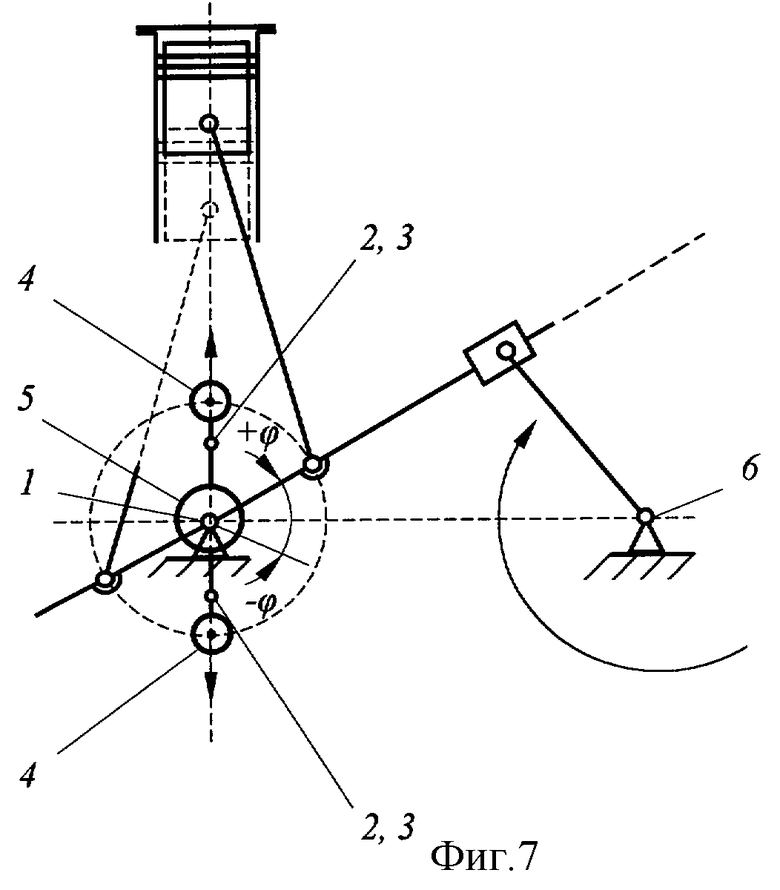
фиг.7 - вид спереди поршневой резонансной машины с уравновешивающим устройством;
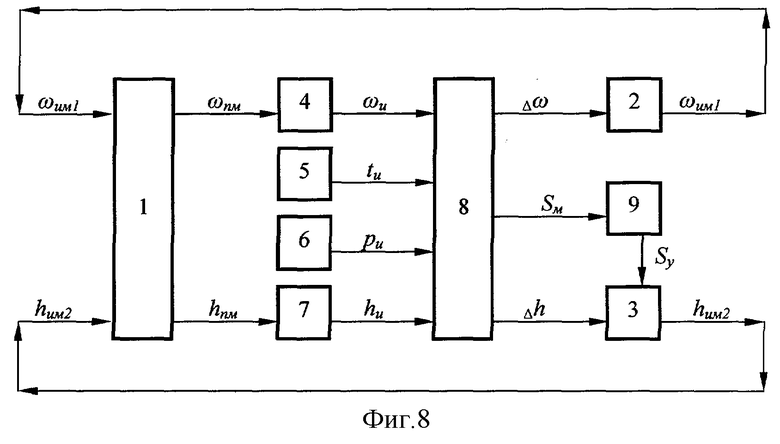
фиг.8 - блок-схема резонансной поршневой машины;
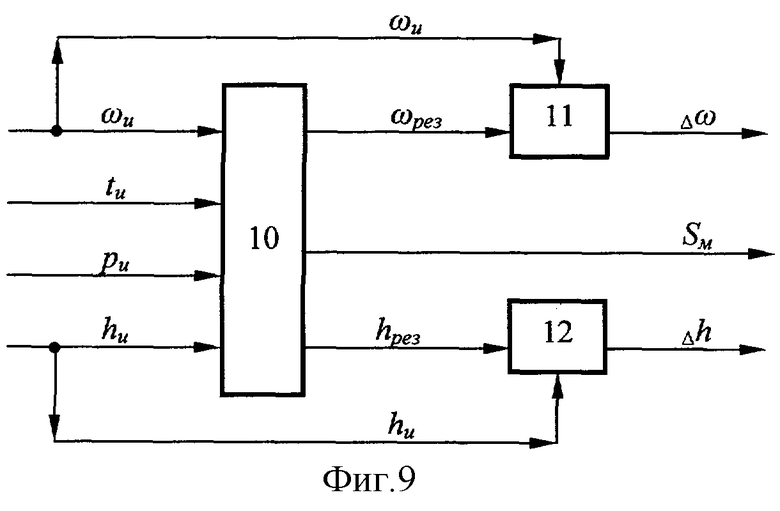
фиг.9 - блок-схема микропроцессорной системы управления.
На схеме (фиг.1 - Схема колебательной системы с грузом и двумя механическими пружинами) груз массой т, находящийся между двумя пружинами одинаковой жесткости с, совершает вынужденные колебания с амплитудой А под действием гармонической силы
F=F0sinωτ.
Здесь:
F0 - амплитуда силы;
ω - частота возмущения;
τ - время.
Дифференциальное уравнение движения груза

где μ - коэффициент вязкого сопротивления,
х=х(τ) - перемещение тела.
На фиг.2 приведена зависимость амплитуды возмущающей силы в функции угловой частоты при постоянном значении амплитуды колебаний груза. Режиму резонанса (ω=ωрез) соответствует минимальное значение амплитуды возмущения. Рассмотрим теперь поршневой двигатель двухстороннего действия, кинематическая схема которого приведена на фиг.3, и индикаторную диаграмму этого двигателя, приведенную на фиг.4. Выделим справа от точки Рс(ϕ≥0, ϕ - текущая координата угла поворота кривошипа) часть индикаторной диаграммы, симметричную левой. Рс - максимальное значение давления сжатия, Рz - максимальное значение давления сгорания. Вместе с левой частью выделенная правая в дальнейшем будет называться пружинной составляющей индикаторной диаграммы (область S). Оставшуюся часть будем называть производительной (область S1). Между схемами на фиг.1 и 3 можно увидеть аналогию. Массы, совершающие поступательное движение (поршни 2, обводная рамка 5, отнесенные к поступательному движению части масс шатунов 4), ведут себя аналогично грузу, изображенному на фиг.1. Амплитуда колебаний здесь равна радиусу кривошипа 3. Также имеются пружины (пружинные составляющие индикаторных диаграмм). Имеется и возмущающее воздействие (сумма производительных составляющих индикаторных диаграмм и сил сопротивления вертикальных составляющих взаимодействия поршня с шатунами и цилиндрами). Данная система относится к классу автоколебательных и при некоторых соотношениях массы частей, совершающих поступательное движение, параметров индикаторной диаграммы и средней угловой скорости вращения коленчатого вала ωрез (резонансной угловой скорости) можно добиться режима авторезонанса. В этом случае наблюдается увеличение КПД, существенное снижение усилий в сочленениях шатунно-кривошипного механизма, а также снижение коэффициента неравномерности угловой скорости вращения вала (фиг.5 - Коэффициент неравномерности угловой скорости вращения коленчатого вала в функции угловой скорости вращения коленчатого вала). Важно отметить, что частота свободных колебаний рассмотренной системы зависит от массы частей, совершающих поступательное движение, а также от характеристики упругости рабочего тела в цилиндре 1. В эксплуатации весьма сложно изменять значение массы, но воздействовать на жесткость газа - пружины возможно.
Величина ωрез в основном зависит от температуры и количества газа в начале движения поршня к верхней мертвой точке, степени сжатия и инерционных характеристик автоколебательной системы. Для эффективного резонансного режима необходимо влиять на угловую скорость ω или параметры рабочего процесса, от которых зависит ωрез, таким образом, чтобы поддерживать равенство ω=ωрез.
В эксплуатации возможно изменять, например, центробежную силу инерции груза, совершающего крутильные колебания вокруг оси коленчатого вала поршневой машины (вала колебательной системы 6) (см. фиг.6 и 7), 7, 8 - система рычагов; 9 - грузы; 10 - муфта; 11 - вал поршневой машины. Изменяя момент инерции, можно добиться того, что каждый эксплуатационный режим будет близок к резонансному. Значение резонансной угловой скорости рез для поршневой машины может быть получено путем численного моделирования.
Предлагаемая поршневая резонансная машина 12 (устройство и принцип действия рассмотрим на примере поршневого компрессора) (фиг.8) с кривошипно-шатунным механизмом содержит первое исполнительно-регулирующее устройство 13, предназначенное для плавного изменения угловой скорости вращения вала поршневой машины, второе исполнительно-регулирующее устройство 14, предназначенное для плавного изменения положения муфты маховика с переменным моментом инерции, совершающего колебательное движение вместе с коленчатым валом и предназначенного для изменения момента инерции коленчатого вала поршневой машины (вала колебательной системы), датчик 15 угловой скорости вращения вала поршневой машины ωПМ датчики 16 и 17 соответственно температуры и барометрического давления окружающего воздуха, датчик 18 положения муфты маховика с переменным моментом инерции, микропроцессорную систему управления 19, блок 20 задания закона перемещения муфты маховика с переменным моментом инерции. Микропроцессорная система управления в свою очередь содержит блок 21 (см. фиг.9) с математической моделью работы поршневой резонансной машины, первый блок сравнения 22, второй блок сравнения 23.
Поршневая резонансная машина работает следующим образом. В блоке 21, на вход которого подают выходные сигналы датчиков 15, 16, 17 и 18, определяют путем численного моделирования значение угловой скорости вращения вала ωрез, при которой наступает резонанс в данной колебательной системе при данных измеренных значениях температуры tи и барометрического давления ри окружающего воздуха (на фиг.9 ωи -измеренное значение угловой скорости вращения вала поршневой машины). Выставляют посредством первого исполнительно-регулирующего устройства угловую скорость вала поршневой машины ωрез и посредством второго исполнительно-регулирующего устройства положение hрез муфты маховика с переменным моментом инерции, совершающего колебательное движение и предназначенного для изменения момента инерции коленчатого вала поршневой машины (вала колебательной системы), при котором наступает резонанс в данной колебательной системе при данной ωрез (грубая регулировка). При этом непрерывно рассчитывают коэффициент неравномерности вращения вала поршневой машины в соответствии с выражением
где: ωmax - максимальное значение угловой скорости вращения вала;
ωmin - минимальное значение угловой скорости вращения вала;
ωср - среднее значение угловой скорости вращения вала.
В первом блоке сравнения 22 проводят сравнение рассчитанного ωрез и измеренного ωи значений угловой скорости вращения вала, во втором блоке сравнения 23 - сравнение рассчитанного hрез и измеренного hи положений муфты уравновешивающего устройства поршневой машины. Сигналы рассогласования Δω и Δh с выходов первого и второго блоков сравнения подают соответственно на первые входы первого и второго исполнительно-регулирующих устройств, плавно изменяющих скорость вращения вала поршневой машины и положение муфты маховика с переменным моментом инерции до тех пор, пока не наступит резонансный режим. Скорость вращения вала поршневой машины и положение муфты маховика с переменным моментом инерции автоматически подстраивают до выполнения условия минимума коэффициента неравномерности вращения вала поршневой машины δ (тонкая регулировка). Причем на второй вход первого блока сравнения подают выходной сигнал датчика 15, а на второй вход второго блока сравнения - выходной сигнал датчика 18. Выполнение условия минимума коэффициента неравномерности вращения вала поршневой машины δ означает, что поршневая машина настроена на резонансный режим. Блок 20 задания закона перемещения муфты маховика с переменным моментом инерции предназначен для приведения в соответствие изменение выходного сигнала второго исполнительно-регулирующего устройства во времени в зависимости от величины сигнала рассогласования Δh. На вход блока 20 подают сигнал Sм с выходы блока 19, а выходной сигнал Sy блока 20 подают вход блока 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРШНЕВАЯ РЕЗОНАНСНАЯ МАШИНА | 2004 |
|
RU2263789C1 |
| ПОРШНЕВАЯ РЕЗОНАНСНАЯ МАШИНА | 2004 |
|
RU2264540C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2254249C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2283252C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2258838C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ В ПНЕВМАТИЧЕСКОЙ СИСТЕМЕ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2258014C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОХЛАЖДАЮЩЕЙ СРЕДЫ ТЕПЛОВОЙ МАШИНЫ | 2003 |
|
RU2264544C2 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОБМОТОК ТЯГОВЫХ ЭЛЕКТРИЧЕСКИХ МАШИН С ЭЛЕКТРИЧЕСКИМ НА ПЕРЕМЕННОМ ТОКЕ ПРИВОДОМ ВЕНТИЛЯТОРА | 2003 |
|
RU2256996C1 |
| УСТРОЙСТВО СОГЛАСОВАННОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИВОДАМИ ОСЕВОГО ВЕНТИЛЯТОРА | 2003 |
|
RU2258157C2 |
Изобретение относится к поршневым машинам. Поршневая резонансная машина с кривошипно-шатунным механизмом содержит маховик с переменным моментом инерции, муфтой, грузами и системой рычагов, предназначенный для плавного изменения момента инерции колебательной системы, датчик угловой скорости вращения вала, датчик температуры окружающей среды, датчик барометрического давления окружающей среды, датчик положения муфты маховика с переменным моментом инерции, микропроцессорную систему управления, блок задания закона перемещения муфты маховика с переменным моментом инерции. Микропроцессорная система управления содержит блок с математической моделью работы поршневой резонансной машины, первый блок сравнения, второй блок сравнения. Выходные сигналы датчика угловой скорости вращения вала, датчика температуры окружающей среды, датчика барометрического давления окружающей среды, датчика положения муфты маховика с переменным моментом инерции подают на входы блока с математической моделью работы поршневой резонансной машины. На первый вход первого блока сравнения подают рассчитанное значение угловой скорости вращения вала поршневой машины, соответствующее резонансному режиму при данных измеренных значениях температуры и барометрического давления окружающего воздуха. На второй вход первого блока сравнения подают выходной сигнал датчика угловой скорости вращения вала. На первый вход второго блока сравнения подают рассчитанное значение положения муфты маховика с переменным моментом инерции, соответствующее резонансному режиму при данных измеренных значениях температуры и барометрического давления окружающего воздуха, а также для данного резонансного значения угловой скорости вращения вала поршневой машины, а на второй вход второго блока сравнения - выходной сигнал датчика положения муфты маховика с переменным моментом инерции. С выходов первого и второго блоков сравнения подают сигналы на входы соответственно первого и второго исполнительно-регулирующих устройств, плавно изменяющих скорость вращения вала поршневой машины и положение муфты маховика с переменным моментом инерции до выполнения условия минимума коэффициента неравномерности вращения вала поршневой машины. Выполнение этого условия означает, что поршневая машина настроена на резонансный режим. На вход блока задания закона перемещения муфты маховика с переменным моментом инерции подают сигнал с выхода микропроцессорной системы управления, а выходной сигнал этого блока подают на вход второго блока сравнения. Изобретение обеспечивает автоматическое поддержание в поршневой машине резонансного режима. 9 ил.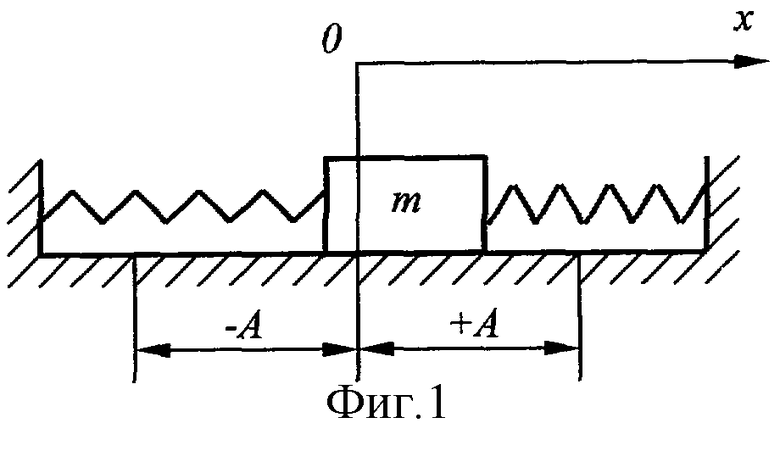
Поршневая резонансная машина с кривошипно-шатунным механизмом, отличающаяся тем, что содержит маховик с переменным моментом инерции, муфтой, грузами и системой рычагов, предназначенный для плавного изменения момента инерции колебательной системы, датчик угловой скорости вращения вала, датчик температуры окружающей среды, датчик барометрического давления окружающей среды, датчик положения муфты маховика с переменным моментом инерции, микропроцессорную систему управления, блок задания закона перемещения муфты маховика с переменным моментом инерции; микропроцессорная система управления, в свою очередь, содержит блок с математической моделью работы поршневой резонансной машины, первый блок сравнения, второй блок сравнения; причем выходные сигналы датчика угловой скорости вращения вала, датчика температуры окружающей среды, датчика барометрического давления окружающей среды, датчика положения муфты маховика с переменным моментом инерции подают на входы блока с математической моделью работы поршневой резонансной машины; на первый вход первого блока сравнения подают рассчитанное значение угловой скорости вращения вала поршневой машины, соответствующее резонансному режиму при данных измеренных значениях температуры и барометрического давления окружающего воздуха, а на второй вход первого блока сравнения - выходной сигнал датчика угловой скорости вращения вала; на первый вход второго блока сравнения подают рассчитанное значение положения муфты маховика с переменным моментом инерции, соответствующее резонансному режиму при данных измеренных значениях температуры и барометрического давления окружающего воздуха, а также для данного резонансного значения угловой скорости вращения вала поршневой машины, а на второй вход второго блока сравнения - выходной сигнал датчика положения муфты маховика с переменным моментом инерции; с выходов первого и второго блоков сравнения подают сигналы на входы соответственно первого и второго исполнительно-регулирующих устройств, плавно изменяющих скорость вращения вала поршневой машины и положение муфты маховика с переменным моментом инерции до выполнения условия минимума коэффициента неравномерности вращения вала поршневой машины, причем выполнение этого условия означает, что поршневая машина настроена на резонансный режим; на вход блока задания закона перемещения муфты маховика с переменным моментом инерции подают сигнал с выхода микропроцессорной системы управления, а выходной сигнал этого блока подают на вход второго блока сравнения.
| Асташев В.К | |||
| и др | |||
| Динамика машин и управление машинами | |||
| - М.: Машиностроение, 1988 | |||
| Устройство для автоматического регулирования загрузкой двигателя транспортного средства | 1977 |
|
SU968499A1 |
| Всережимный регулятор частоты вращения дизеля | 1981 |
|
SU1043333A1 |
| Двухслойное просветление поверхностей оптических деталей | 1958 |
|
SU121232A1 |
| US 4532593 A, 30.07.1985 | |||
| СПОСОБ ВОССТАНОВИТЕЛЬНОГО ЛЕЧЕНИЯ ЖЕНЩИН РЕПРОДУКТИВНОГО ВОЗРАСТА С ТАЗОВЫМИ ПЕРИТОНЕАЛЬНЫМИ СПАЙКАМИ С ФИКСИРОВАННОЙ ИЛИ СУБФИКСИРОВАННОЙ РЕТРОДЕВИАЦИЕЙ МАТКИ | 2005 |
|
RU2301691C1 |
| Устройство для измерения электропроводности жидкостей | 1988 |
|
SU1520427A1 |

