Изобретение относится к области космической техники и может быть использовано как электромеханический исполнительный орган (силовой гиростабилизатор) в системах ориентации космических аппаратов.
Известны исполнительные органы на базе двухстепенных гироскопов, которые выполняются по классической кинематической схеме гироскопических устройств (см. книгу Раушенбаха Б.В., Токаря Е.Н. Управление ориентацией космических аппаратов. - М.: Наука, 1974 г., с.353).
Известные классические кинематические схемы имеют ряд существенных недостатков: наличие реактивного момента при включении датчика момента, большое энергопотребление, габариты и масса датчика момента, наличие остаточных моментов в пассивном режиме ориентации, для осуществления линейной характеристики управления момент сухого трения в оси подвеса двигателя-маховика должен быть минимальным и т.д.
Известны также электромеханические исполнительные органы (см. авт. св. №1839925, М. кл. G 01 C 19/00, 2006), содержащие датчик угла, связанный с рамкой карданова подвеса электродвигателя-маховика, вязкий демпфер, привод вращения рамки, включающий электродвигатель, редуктор, упругий элемент и переключающую муфту.
Известный электромеханический исполнительный орган имеет также ряд недостатков: появляются новые конструктивные элементы (переключающая муфта, упругий элемент), которые существенно снижают надежность, долговечность, габаритно-массовые характеристики устройства.
Целью настоящего изобретения является расширение функциональных возможностей электромеханического исполнительного органа, обеспечение расширения диапазона активного и пассивного управления, снижение потребляемой мощности, снижение массы и габаритов, повышение долговечности и надежности.
Для достижения этой цели в известном электромеханическом исполнительном органе, включающем привод вращения рамки карданова подвеса, который состоит из электродвигателя, редуктора, упругого элемента, переключающей муфты, демпфера, встроено моментно-демпфирующее устройство.
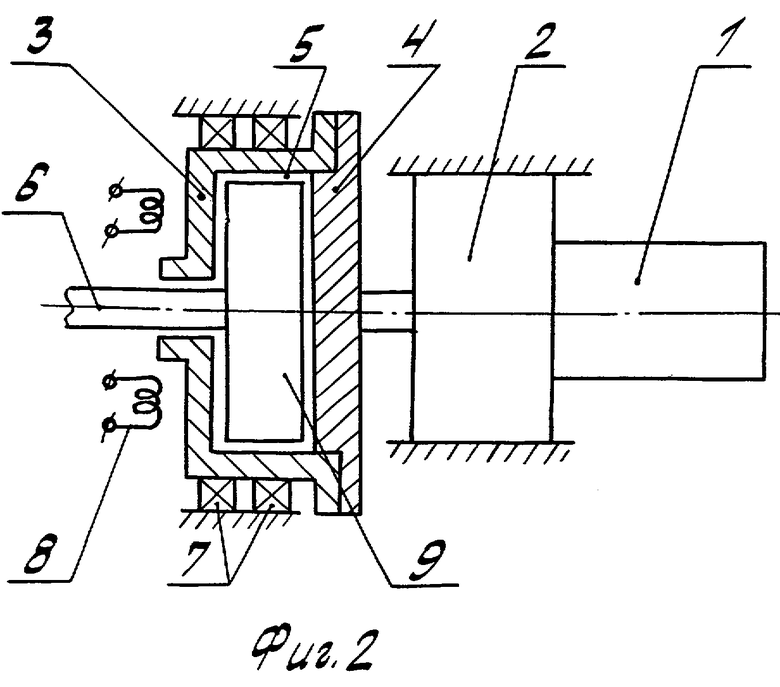
Сущность изобретения поясняется чертежами. Предлагаемый электромеханический исполнительный орган (фиг.1) имеет датчик угла, связанный с рамкой карданова подвеса электродвигателя-маховика, и моментно-демпфирующее устройство (фиг.2), состоящее из электродвигателя (1), редуктора (2) и ″обращенного″ гидравлического демпфера (3).
Ротор (9) демпфера жестко крепится на валу (6) рамки карданова подвеса гиростабилизатора, корпус демпфера (4) устанавливается в подшипниках качения (7) с возможностью вращения, корпус (4) жестко связан с выходным валом редуктора. Конструктивно демпфер представляет собой поплавковый гидравлический успокоитель, рабочим телом которого является ферромагнитная жидкость (5).
В данном устройстве угловая скорость, которая регулируется приводом, преобразуется в момент, который возникает при относительном движении ротора и статора демпфера за счет вязкого трения (сопротивления) демпфирующей жидкости, а использование в качестве рабочего тела ферромагнитной жидкости позволит регулировать ее вязкость в широких пределах электромагнитным полем, создаваемым электромагнитами (8), это свойство ферромагнитных жидкостей отмечено в литературе (Бибик Е.Е., Бузунов О.В. Достижения в области получения и применения ферромагнитных жидкостей. - М.: ЦНИИ "Электроника", 1979, с.11). Возможность глубокого регулирования угловой скорости выходного вала редуктора и изменения вязкости демпфирующей жидкости позволяет получить широкий диапазон регулируемых моментов. МДУ (моментно-демпфирующее устройство) электромеханического исполнительного органа работает в двух режимах. Рассмотрим первый режим. Электродвигатель (1) не включен, демпфер работает как успокоитель моментов, возникающих в подвесе гиростабилизатора. Аналогичный режим есть и у демпфера-прототипа. В этом случае корпус (4), за счет жесткой связи с выходным валом редуктора, который обладает самоторможением, остается неподвижным. Рассмотрим второй режим, когда работает электродвигатель (1). Выходной вал редуктора (2) поворачивает корпус (4) демпфера (3), при этом к ротору (9) прикладывается момент, величина которого определяется по известной формуле
где С - коэффициент демпфирования;
 - угловая скорость относительного движения ротора и статора демпфера
- угловая скорость относительного движения ротора и статора демпфера
где R, l, δ - геометрические параметры демпфера;
η - вязкость жидкости.
Для получения еще больших величин момента создаем магнитное поле при помощи обычных электромагнитов, увеличиваем при этом вязкость демпфирующей жидкости, тем самым увеличиваем и коэффициент демпфирования С.
Можно отметить еще одно положительное качество использования ферромагнитной жидкости: возможность создания на ее основе подвижного магнитного уплотнения вала ротора (6) в корпусе (4) и тем самым обеспечения герметизации внутренней полости демпфера при повороте на большие углы, вплоть до кругового вращения, и на длительный срок эксплуатации.
По сравнению с прототипом эффективность предлагаемого электромеханического исполнительного органа заключается в следующем.
1. Увеличивается диапазон регулируемых моментов.
2. Повышается надежность за счет упрощения конструкции.
3. Повышается ресурс за счет применения бесконтактных магнитных уплотнений.
4. Улучшаются габаритно-массовые характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН КОСМИЧЕСКОГО АППАРАТА | 1979 |
|
SU1839918A1 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1984 |
|
SU1839933A1 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН | 1982 |
|
SU1839925A1 |
| СИЛОВОЕ ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 1971 |
|
SU1839791A1 |
| УСТРОЙСТВО ГИРОСКОПИЧЕСКОЙ СТАБИЛИЗАЦИИ ЛИДАРА В ПЛОСКОСТИ ГОРИЗОНТА | 2007 |
|
RU2329468C1 |
| СИЛОВОЙ ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1985 |
|
SU1839930A1 |
| Устройство управления стабилизирующими моторами курсовертикали | 2022 |
|
RU2787311C1 |
| УСТРОЙСТВО ДЛЯ ЗАДАНИЯ УГЛОВЫХ КОЛЕБАНИЙ ИСПЫТУЕМОМУ ОБЪЕКТУ | 1989 |
|
RU2010206C1 |
| КОМБИНИРОВАННАЯ ГРАВИТАЦИОННАЯ СИСТЕМА ОРИЕНТАЦИИ МАЛОГО КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2658070C2 |
Изобретение относится к области космической техники и может быть использовано как электромеханический исполнительный орган в системах ориентации космических аппаратов. Сущность: устройство содержит гиродвигатель в кардановой рамке, датчик угла и моментное устройство с электродвигателем и редуктором. При этом между редуктором и рамкой карданового подвеса установлен управляемый демпфер. Кроме того, управляемый демпфер может быть выполнен в виде корпуса с электромагнитами, заполненного ферромагнитной жидкостью, в котором установлен магнитомягкий ротор. Технический результат: расширение диапазона нагрузок при контроле распределенных преобразователей механических колебаний. 1 з.п. ф-лы, 2 ил.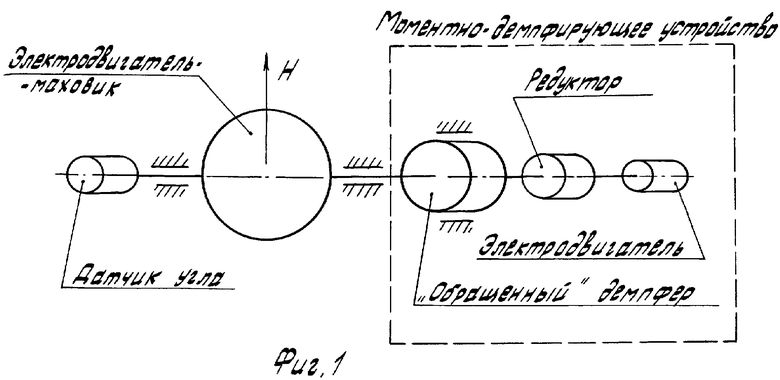
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН | 1982 |
|
SU1839925A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Раушенбах Б.В., Токарь Е.Н | |||
| Управление ориентацией космических аппаратов | |||
| - М.: Наука, 1974, с.353. | |||

