Изобретение относится к технологии производства радиоаппаратуры и предназначено для подготовки выводов диодов к монтажу.
Известны устройства для формовки выводов диодов, содержащие лол емент для установки на нем диода, подвижный .прижим, гибочный орган и лриводной механизм. В таких устройствах гибка выводов производится поочередно, что снижает производительность ИХ работы.
Цель изобретения - создать высокопроизводительное автоматическое устройство для формовки ВЫВОДОВ диодов.
Для этого в гибочном органе применена подвижная планка с Г-образным звеном, снабженным подвижным штифтом, который соединен вилкой с зубчато-реечной парой, управляемой приводным механизмом. Подвижная нланка соединена с гибочным валиком, несущим гибочный стержень, а подвижный прижим упругим элементом связан с рычагом приводного механизма.
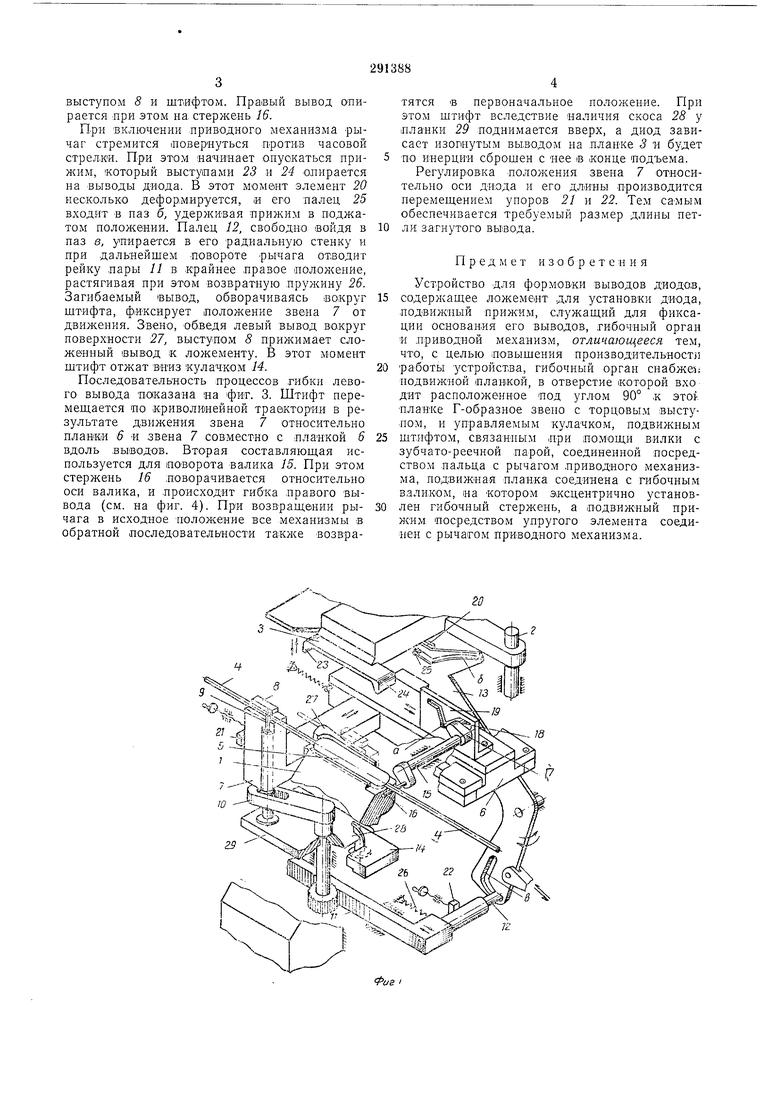
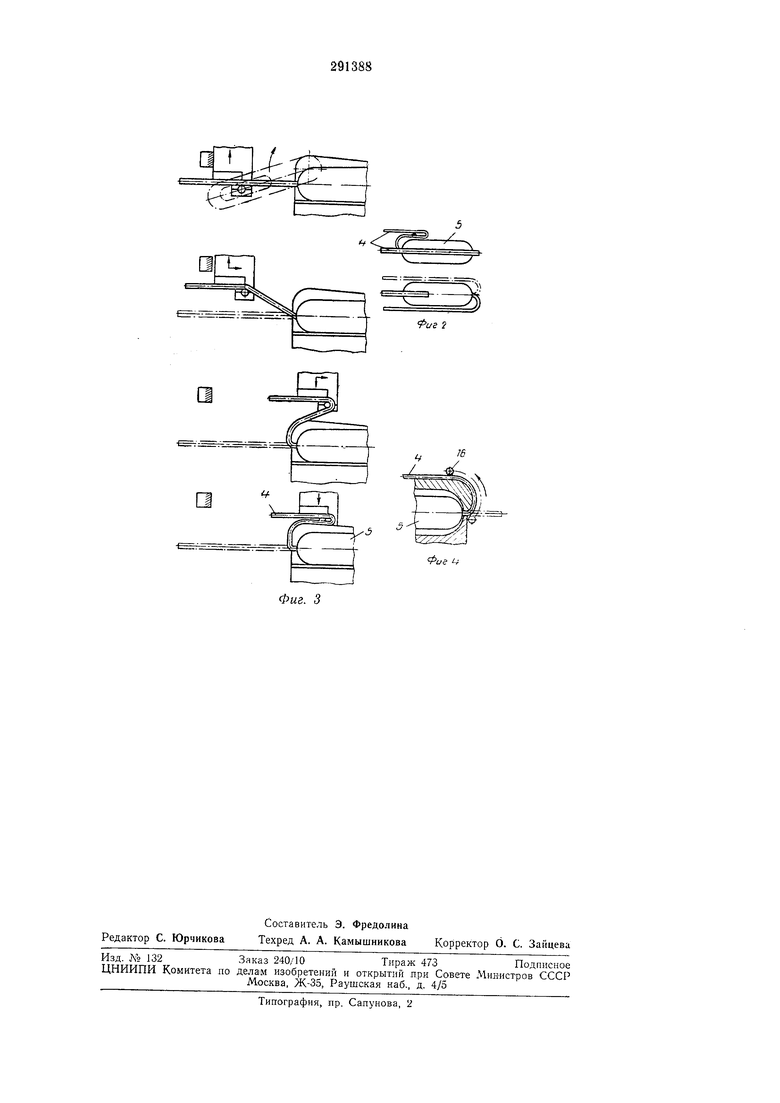
На фиг. 1 изображена кинематическая схема предлагаемого устройства; на фиг. 2 - диод с загнутыми выводами в двух проекциях (пунктиром показан вариант гибки правого вывода); на фиг. 3 - вариант гибки левого вывода, на фиг. 4 - вариант гибки правоговывода.
Устройство содержит установочный лол е:мент / и расположенный на двух колонках 2 подвижный приншм 3, обеспечивающий фиксацию основания выводов 4 диода 5. Гибочный орган снабжен механизмами гибки левого и правого выводов. Механизм гибки левого вывода содержит подвижную планку 6, в отверстие которой входит расположенное под углом 90° к ней Г-образное звено 7.
Оно снабжено торцовым выступом 5 и подвижным щтифтом 9, связанным посредством вилки 10 с зубчато-реечной парой 11. Последняя соединена пальцем 12 с рычагом 13 приводного механизма, не показанного на чертежах. Для управления продольным перемещением щтифта служит кулачок 14.
Механизм гибки правого вывода состоит из гибкого поворотного валика 15, снабл енного
эксцентрично расположенным гибочным стержнем 16. Вращение валику передается через колено 17, снабженное пальцем 18, который входит в фигурную прорезь а планки 19, установленной на подвижной планке.
Прижим соединен с рычагом упругим элементом 20. Регулируемые упоры 21 и 22 определяют исходное положение планки 6 и зубчато-реечной пары. Диод укладывается на лол емент так, чтовыступом 5 и ШТИФТОМ. Правый вывод опирается при этом на стержень 16.
При включении приводного механизма рычаг стремится (Повернуться против часовой стрелки. ПрИ этом начинает опускаться прижим, который выступами 23 и 24 опирается на выводы диода. В этот момент элемент 20 несколько дефор;мируется, и его палец 25 входит в паз б, удерживая прижим в поджатом положении. Палец 12, свободно войдя в паз в, упирается в его радиальную стенку и при дальнейшем повороте рычага отводит рейку пары 11 в крайнее правое положение, растягивая при этом возвратную пружину 26. Загибаемый вывод, обворачиваясь iBOKpyr штифта, фиксирует положение звена 7 от движения. Звено, обведя левый вывод BOiKpyr поверхности 27, выступом 8 прижимает сложе нный вывод к ложементу. В этот момент штифт отжат вниз кулачком 14.
Последовательность процессов .гибки левого вывода показана на фит. 3. Штифт перемеш,ается по криволинейной траектории в результате движения звена 7 относительно планки 6 « звена 7 совместно с планкой 6 вдоль выводов. Вторая составляющая используется для поворота валика 15. При этом стержень 16 поворачивается относительно оси валика, и происходит гибка правого вывода (см. на фиг. 4). При возвращении рычага в исходное полонсение все механизмы в обратной последовательности также возвратятся в первоначальное положение. При этом штифт вследствие наличия скоса 28 у планки 29 поднимается вверх, а диод зависает изогнутым выводом на планке 3 и будет по инерции сброшен с нее в конце подъема.
Регулировка положения звена 7 относительно оси диода и его длины производится перемещением упоров 21 и 22. Тем самым обеспечивается требуемый размер длины петли: загнутого вывода.
Предмет и з о б р е т е н и я
Устройство для формовки выводов диодов,
содержащее ложемент для установки диода, подвижный прижим, для фиксации основания его выводов, гибочный орган и приводной механизм, отличающееся тем, что, с целью 1повыщения производительност))
работы устройства, гибочный орган снабже : подвижной плавкой, в отверстие которой вхо дит расположенное под углом 90° к эток планке Г-образное звено с торцовым выступом, и управляемым кулачком, подвижным
штифтом, связанным при помощи вилки с зубчато-реечной парой, соединенной посредством пальца с рычагом приводного механизма, подвижная планка соединена с гибочным валиком, на котором эксцентрично установлен гибочный стержень, а подвижный прижим посредством упругого элемента соединен с рычагом приводного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для навивки пружин с фасонными ушками | 1978 |
|
SU733816A1 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, СОДЕРЖАЩИЙ МНОГОХОДОВЫЙ ПРИВОДНОЙ МЕХАНИЗМ ЗАПУСКА С ПОВОРОТНОЙ РУЧНОЙ ОТВОДЯЩЕЙ СИСТЕМОЙ С ВОЗВРАТНОЙ ПРУЖИНОЙ | 2006 |
|
RU2420240C2 |
| Автомат для изготовления деталей из проволоки | 1991 |
|
SU1787630A1 |
| Устройство для многоколенной гибки труб | 1990 |
|
SU1734907A1 |
| УСТРОЙСТВО ДЛЯ ДВУХСТОРОННЕЙ ГИБКИ ТРУБ В ДВУХ ПЛОСКОСТЯХ | 2005 |
|
RU2292974C2 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Устройство для гибки прутков | 1975 |
|
SU553032A1 |
| МНОГОХОДОВОЙ МЕХАНИЗМ С АВТОМАТИЧЕСКИМ ОТВЕДЕНИЕМ В КОНЦЕ ХОДА | 2006 |
|
RU2419392C2 |
| Электромеханический привод зажимного устройства | 1983 |
|
SU1235664A1 |
20
Фиг. 3
Фие i-f
