СЛ
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Трубогибочный комплекс | 1987 |
|
SU1524957A1 |
| Устройство для многоколенной гибки труб | 1977 |
|
SU722634A1 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2422229C1 |
| Трубогибочная машина | 1988 |
|
SU1556786A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 2010 |
|
RU2434703C1 |
| Устройство для двусторонней гибки | 1988 |
|
SU1586821A1 |
| Полуавтомат для пространственной гибки труб | 1986 |
|
SU1378985A1 |
| Способ гибки труб и станок для осуществления способа | 2020 |
|
RU2774676C2 |
| Трубогибочное устройство | 1988 |
|
SU1667986A2 |
| Трубогибочный станок | 1982 |
|
SU1189534A1 |
Изобретение относится к обработке металлов давлением, в частности к трубогибоч- ному оборудованию, и может быть использовано при изготовлении трубопроводов в различных отраслях промышленности. Цель изобретения - повышение надежности за счет исключения ударных нагрузок и качества готового изделия за счет обеспечения высокой точности гибки. После установки трубы на дорн 8 и фиксации осуществляется под
5 J
CJ
о
о VI
вод дорна в зону гибки, прижим и поджим трубы к гибочной головке. При этом поворотный диск командоаппарата задания узла гибки поворачивается в определенное положение, а подпружиненный упорный штырь соответствующей длины, расположенный на диске, занимает положение напротив торца нажимной рейки зубчато-реечного редуктора 37. В процессе гибки нажимная рейка взаимодействует с упорным штырем, который дает команду на отключение механизмов прижима и поджима трубы и на отвод дорна из зоны гибки. Поворачивается подпружиненный вал с группой упоров, выставляя упор, соответствующий последующему положению каретки подачи трубы.
Изобретение относится к обработке металлов давлением, в частности к трубоги- бочному оборудованию, и может быть использовано при изготовлении трубопроводов в различных отраслях промышленности.
Целью изобретения является повышение надежности за счет исключения ударных нагрузок и повышение качества изделий за счет обеспечения высокой точности гибки.
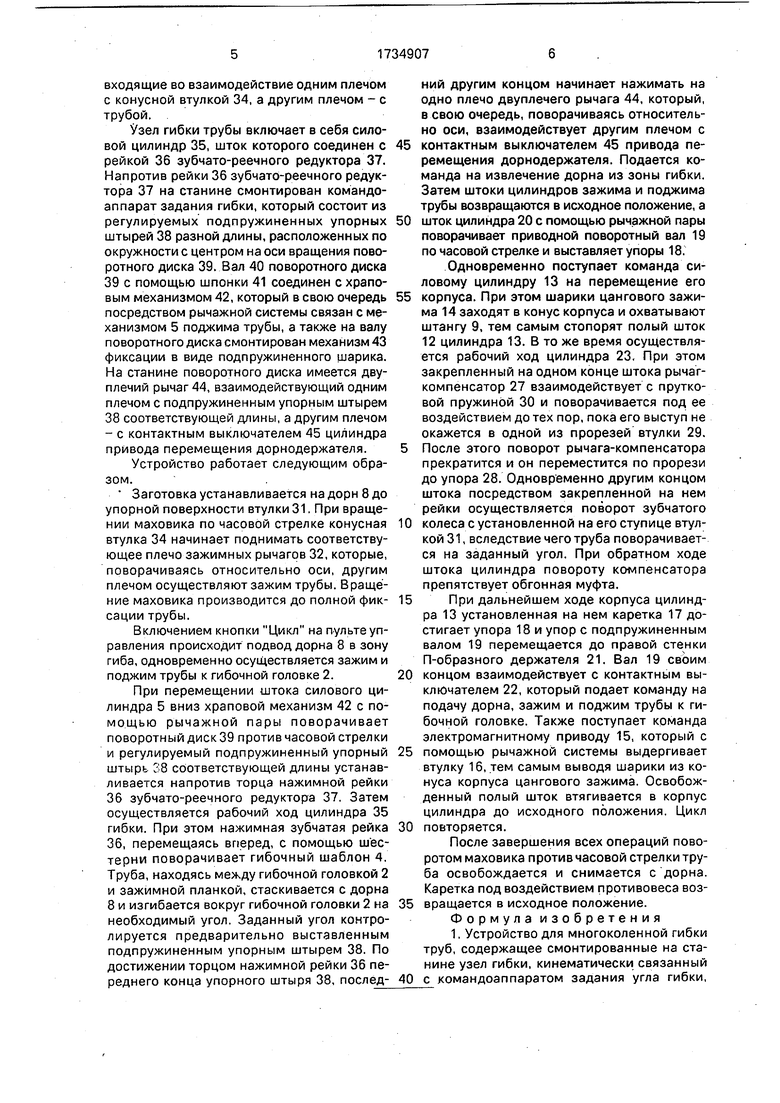
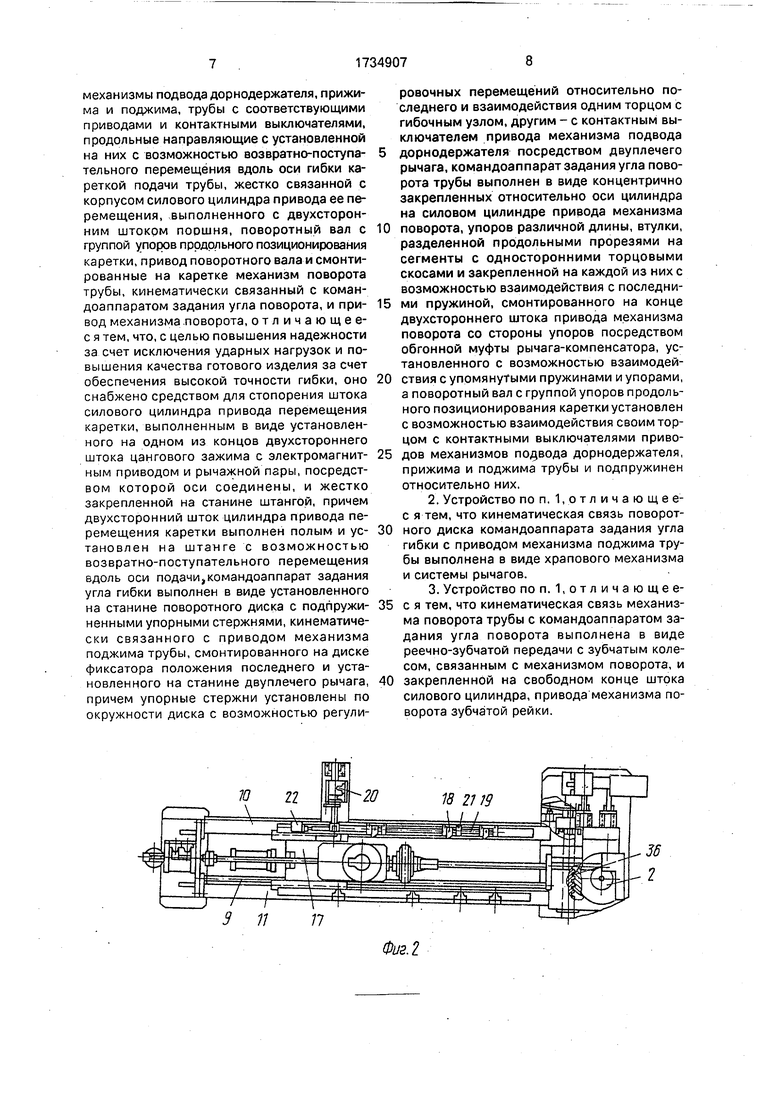
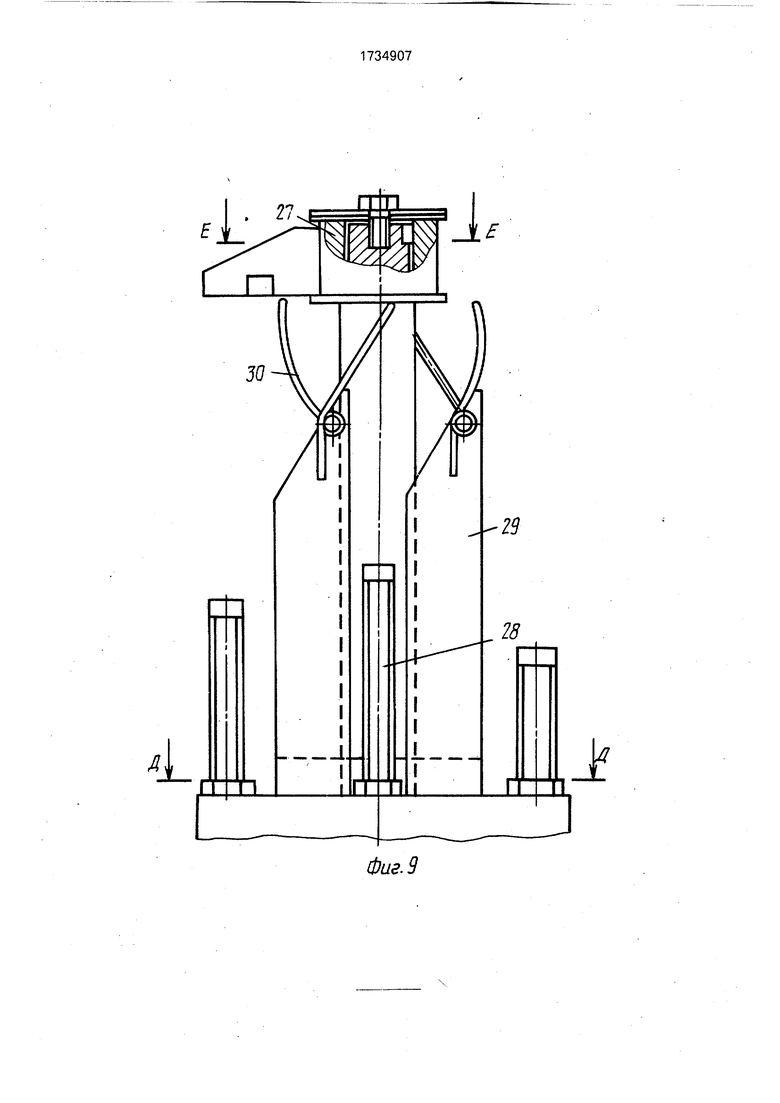
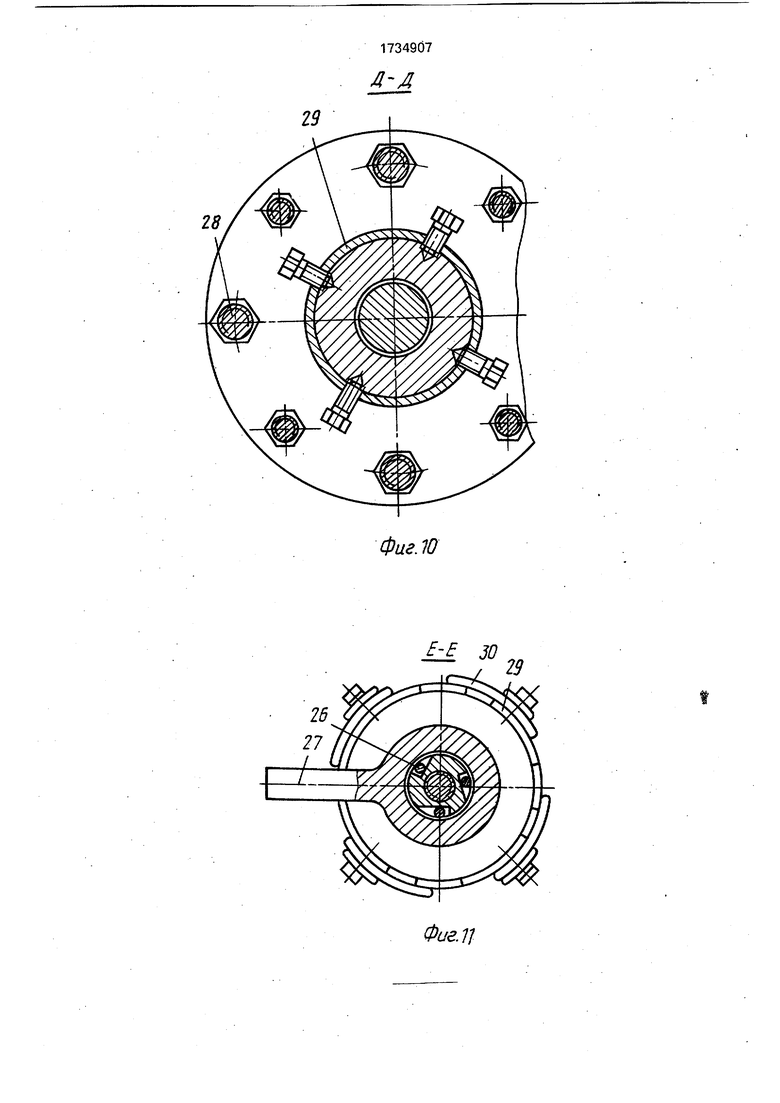
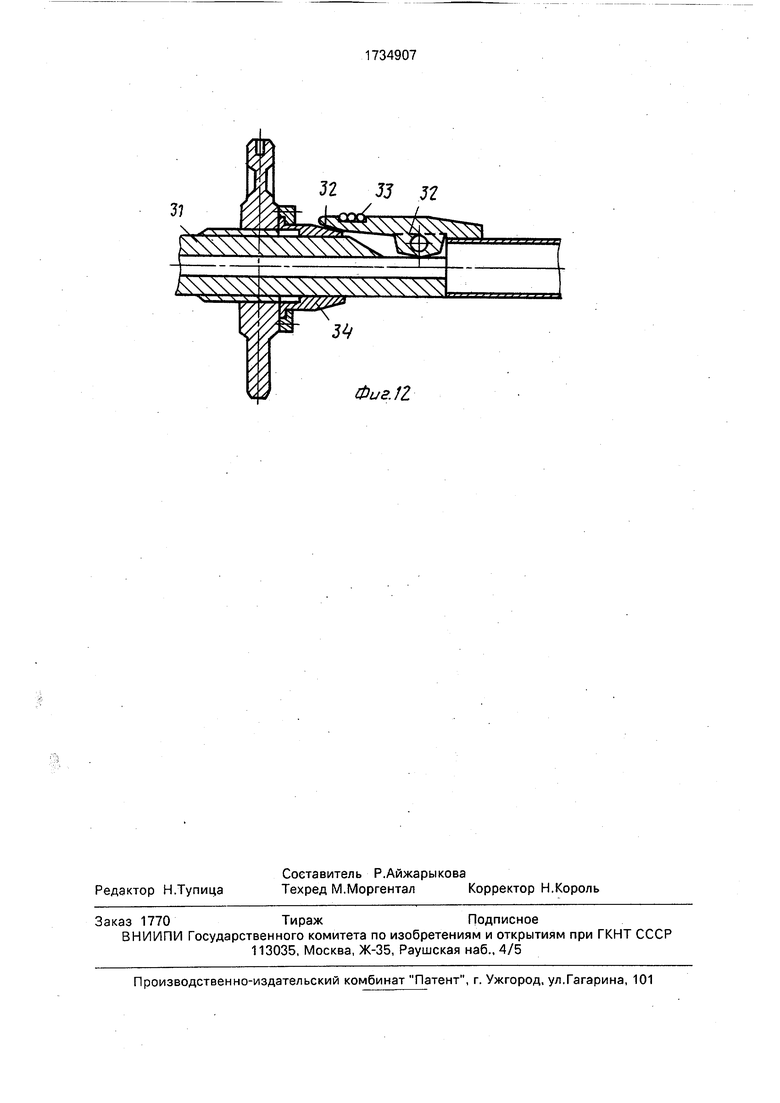
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - командоаппарат задания гибки; на фиг. 5-тоже, вид в плане; на фиг. 6- разрез Б-Б на фиг. 4; на фиг. 7 - разрез В-В на фиг. 4; на фиг. 8 - разрез Г-Г на фиг. 7; на фиг. 9 - командоаппарат задания угла поворота трубы; на фиг. 10 - разрез Д-Д на фиг. 9; на фиг. 11 - разрез Е-Е на фиг. 9; на фиг. 12 - узел фиксации трубы.
Устройство для многоколенной гибки труб содержит станину 1, на правой верхней плоскости которой смонтированы гибочная головка 2 с механизмом 3 зажима трубы на гибочном шаблоне 4, выполненного в виде ползуна, и механизм 5 поджима трубы, а на левой верхней плоскости - цилиндр 6 с до- рнодержателем 7 для подачи и извлечения дорна 8.
Правую и левую плоскости станины соединяют горизонтально закрепленная штанга
9и расположенные над ней направляющие
10и 11. На штанге подвижно установлен двухсторонний полый шток 12 силового цилиндра 13, несущий одним концом цанговый зажим 14. Управление цанговым зажимом осуществляется от электромагнитного привода 15, который установлен на правом конце
Одновременно поступает команда силовому цилиндру 13 на перемещение его корпуса, жестко связанного с кареткой, относительно застопоренного цанговым зажимом 14 полого штока 12. При этом включается механизм поворота трубы до момента взаимодействия рычага-компенсатора 27 с соответствующим упором командоаппарата задания угла поворота. При взаимодействии каретки с соответствующим упором ее позиционирования подпружиненный вал взаимодействует с контактным выключателем механизмов подвода дорна, прижима и поджима трубы, полый шток 12 занимает исходное положение относительно корпуса цилиндра 13 и цикл повторяется. 2 з.п. ф-лы, 12 ил.
корпуса цангового.зажима и через рычажную систему соединен с втулкой 16.
На корпусе силового цилиндра 13 жестко смонтирована каретка 17, имеющая воз- можность свободно перемещаться по направляющим 10 и 11 до соответствующих упоров 18. Упоры жестко закреплены на валу 19, который поворачивается от силового цилиндра 20 посредством рычажной системы.
Вал 19 подпружинен вдоль оси относительно П-образных держателей 21 и взаимодействует торцом с контактным выключателем 22. П-образные держатели 21 расположены на направляющей 10 на расстоянии друг от
друга, равном длине прямого участка изгибаемой трубы.
Механизм поворота трубы смонтирован на каретке 17 и состоит из силового цилиндра 23, вертикально расположенного на
кронштейне, шток которого одним концом соединен с рейкой 24 зубчато-реечного редуктора 25. Другой конец штока выполнен в виде обгонной муфты, образуемой движущимися в пазах штока шариками 26 и закрепленными на его торце рычагом-компенсатором 27, взаимодействующим с упорами командоаппарата задания угла поворота.
Командоаппарат задания угла поворота включает в себя упоры 28 разной длины и
втулку 29, концентрично расположенные на верхней стенке корпуса цилиндра 23. Втулка 29 разделена продольными прорезями на сегменты, которые со стороны упоров имеют скосы. На скошенной стороне каждого
сегмента закреплена прутковая пружина 30. Ступица шестерни зубчато-реечного редуктора 25 жестко соединена с втулкой 31. На передней части втулки шарнирно установлены зажимные рычаги 32, связанные
друг с другом с помощью пружины 33, и
входящие во взаимодействие одним плечом с конусной втулкой 34, а другим плечом - с трубой.
Узел гибки трубы включает в себя силовой цилиндр 35, шток которого соединен с рейкой 36 зубчато-реечного редуктора 37. Напротив рейки 36 зубчато-реечного редуктора 37 на станине смонтирован командо- аппарат задания гибки, который состоит из регулируемых подпружиненных упорных штырей 38 разной длины, расположенных по окружности с центром на оси вращения поворотного диска 39. Вал 40 поворотного диска 39 с помощью шпонки 41 соединен с храповым механизмом 42, который в свою очередь посредством рычажной системы связан с механизмом 5 поджима трубы, а также на валу поворотного диска смонтирован механизм 43 фиксации в виде подпружиненного шарика. На станине поворотного диска имеется двуплечий рычаг 44, взаимодействующий одним плечом с подпружиненным упорным штырем 38 соответствующей длины, а другим плечом - с контактным выключателем 45 цилиндра привода перемещения дорнодержателя.
Устройство работает следующим образом.
Заготовка устанавливается на дорн 8 до упорной поверхности втулки 31. При вращении маховика по часовой стрелке конусная втулка 34 начинает поднимать соответствующее плечо зажимных рычагов 32, которые, поворачиваясь относительно оси, другим плечом осуществляют зажим трубы. Вращение маховика производится до полной фиксации трубы.
Включением кнопки Цикл на пульте управления происходит подвод дорна 8 в зону гиба, одновременно осуществляется зажим и поджим трубы к гибочной головке 2.
При перемещении штока силового цилиндра 5 вниз храповой механизм 42 с помощью рычажной пары поворачивает поворотный диск 39 против часовой стрелки и регулируемый подпружиненный упорный штырь Г8 соответствующей длины устанавливается напротив торца нажимной рейки 36 зубчато-реечного редуктора 37. Затем осуществляется рабочий ход цилиндра 35 гибки. При этом нажимная зубчатая рейка 36, перемещаясь вперед, с помощью шестерни поворачивает гибочный шаблон 4. Труба, находясь между гибочной головкой 2 и зажимной планкой, стаскивается с дорна 8 и изгибается вокруг гибочной головки 2 на необходимый угол. Заданный угол контролируется предварительно выставленным подпружиненным упорным штырем 38. По достижении торцом нажимной рейки 36 переднего конца упорного штыря 38, последний другим концом начинает нажимать на одно плечо двуплечего рычага 44, который, в свою очередь, поворачиваясь относительно оси, взаимодействует другим плечом с
5 контактным выключателем 45 привода перемещения дорнодержателя. Подается команда на извлечение дорна из зоны гибки. Затем штоки цилиндров зажима и поджима трубы возвращаются в исходное положение, а
0 шток цилиндра 20 с помощью рычажной пары поворачивает приводной поворотный вал 19 по часовой стрелке и выставляет упоры 18.
Одновременно поступает команда силовому цилиндру 13 на перемещение его
5 корпуса. При этом шарики цангового зажима 14 заходят в конус корпуса и охватывают штангу 9, тем самым стопорят полый шток 12 цилиндра 13. В то же время осуществляется рабочий ход цилиндра 23, При этом закрепленный на одном конце штока рычаг- компенсатор 27 взаимодействует с прутковой пружиной 30 и поворачивается под ее воздействием до тех пор, пока его выступ не окажется в одной из прорезей втулки 29.
После этого поворот рычага-компенсатора прекратится и он переместится по прорези до упора 28. Одновременно другим концом штока посредством закрепленной на нем рейки осуществляется поворот зубчатого
0 колеса с установленной на его ступице втулкой 31, вследствие чего труба поворачивается на заданный угол. При обратном ходе штока цилиндра повороту компенсатора препятствует обгонная муфта.
5 При дальнейшем ходе корпуса цилиндра 13 установленная на нем каретка 17 достигает упора 18 и упор с подпружиненным валом 19 перемещается до правой стенки П-образного держателя 21. Вал 19 своим
0 концом взаимодействует с контактным выключателем 22, который подает команду на подачу дорна, зажим и поджим трубы к гибочной головке. Также поступает команда электромагнитному приводу 15, который с
5 помощью рычажной системы выдергивает втулку 16, тем самым выводя шарики из конуса корпуса цангового зажима. Освобожденный полый шток втягивается в корпус цилиндра до исходного положения. Цикл
0 повторяется.
После завершения всех операций поворотом маховика против часовой стрелки труба освобождается и снимается с дорна. Каретка под воздействием противовеса воз5 вращается в исходное положение. Формула изобретения 1. Устройство для многоколенной гибки труб, содержащее смонтированные на станине узел гибки, кинематически связанный
0 с командоаппаратом задания угла гибки,
механизмы подвода дорнодержателя, прижима и поджима, трубы с соответствующими приводами и контактными выключателями, продольные направляющие с установленной на них с возможностью возвратно-поступательного перемещения вдоль оси гибки кареткой подачи трубы, жестко связанной с корпусом силового цилиндра привода ее перемещения, выполненного с двухсторонним штоком поошня, поворотный вал с группой упоров продольного позиционирования каретки, привод поворотного вала и смонтированные на каретке механизм поворота трубы, кинематически связанный с коман- доаппаратом задания угла поворота, и привод механизма поворота, отличающее- с я тем, что, с целью повышения надежности за счет исключения ударных нагрузок и повышения качества готового изделия за счет обеспечения высокой точности гибки, оно снабжено средством для стопорения штока силового цилиндра привода перемещения каретки, выполненным в виде установленного на одном из концов двухстороннего штока цангового зажима с электромагнит- ным приводом и рычажной пары, посредством которой оси соединены, и жестко закрепленной на станине штангой, причем двухсторонний шток цилиндра привода перемещения каретки выполнен полым и установлен на штанге с возможностью возвратно-поступательного перемещения вдоль оси подачи,командоаппарат задания угла гибки выполнен в виде установленного на станине поворотного диска с подпружиненными упорными стержнями, кинематически связанного с приводом механизма поджима трубы, смонтированного на диске фиксатора положения последнего и установленного на станине двуплечего рычага причем упорные стержни установлены по окружности диска с возможностью регули
77
77
0
15
20
2Ъ 30
35
40
ровочных перемещений относительно последнего и взаимодействия одним торцом с гибочным узлом, другим - с контактным выключателем привода механизма подвода дорнодержателя посредством двуплечего рычага, командоаппарат задания угла поворота трубы выполнен в виде концентрично закрепленных относительно оси цилиндра на силовом цилиндре привода механизма поворота, упоров различной длины, втулки, разделенной продольными прорезями на сегменты с односторонними торцовыми скосами и закрепленной на каждой из них с возможностью взаимодействия с последними пружиной, смонтированного на конце двухстороннего штока привода механизма поворота со стороны упоров посредством обгонной муфты рычага-компенсатора, установленного с возможностью взаимодействия с упомянутыми пружинами и упорами, а поворотный вал с группой упоров продольного позиционирования каретки установлен с возможностью взаимодействия своим торцом с контактными выключателями приводов механизмов подвода дорнодержателя, прижима и поджима трубы и подпружинен относительно них.
7%7//Л
г
Г
Фиг.1
г-г
////////Л
Фиг. 8
д
.ли I
jf
Фиг. 9
27
Фаг. Ю
LI JO
Фиг.1
31
Фиг. 11
| Трубогибочный станок | 1982 |
|
SU1189534A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
