Изобретение относится к области средств автоматизации.
Известны пневматические позиционные регуляторы, содержащие блок сравнения, блок зоны нечувствительности и выходной усилитель, в которых для формирования непрерывно-дискретного закона изменения выходного сигнала перед усилителем включен блок дискретного интегрирования.
В известных позиционных регуляторах скорость изменения выходного сигнала независима от знака рассогласования.
В ряде случаев нелинейность характеристик объекта требует различных скоростей изменения выходного сигнала в зависимости от знака рассогласования.
Предложенный регулятор отличается тем, что, с целью повышения качества регулирования, блок зоны нечувствительности выполнен в виде двух параллельно включенных ячеек, каждая из которых содержит дискретный интегратор, выход которого соединен с двумя элементами сравнения, выход первого элемента сравнения подключен через импульсатор к блоку дискретного интегрирования, а второго - к первому входу дискретного интегратора, второй вход которого соединен с выходом блока сравнения.
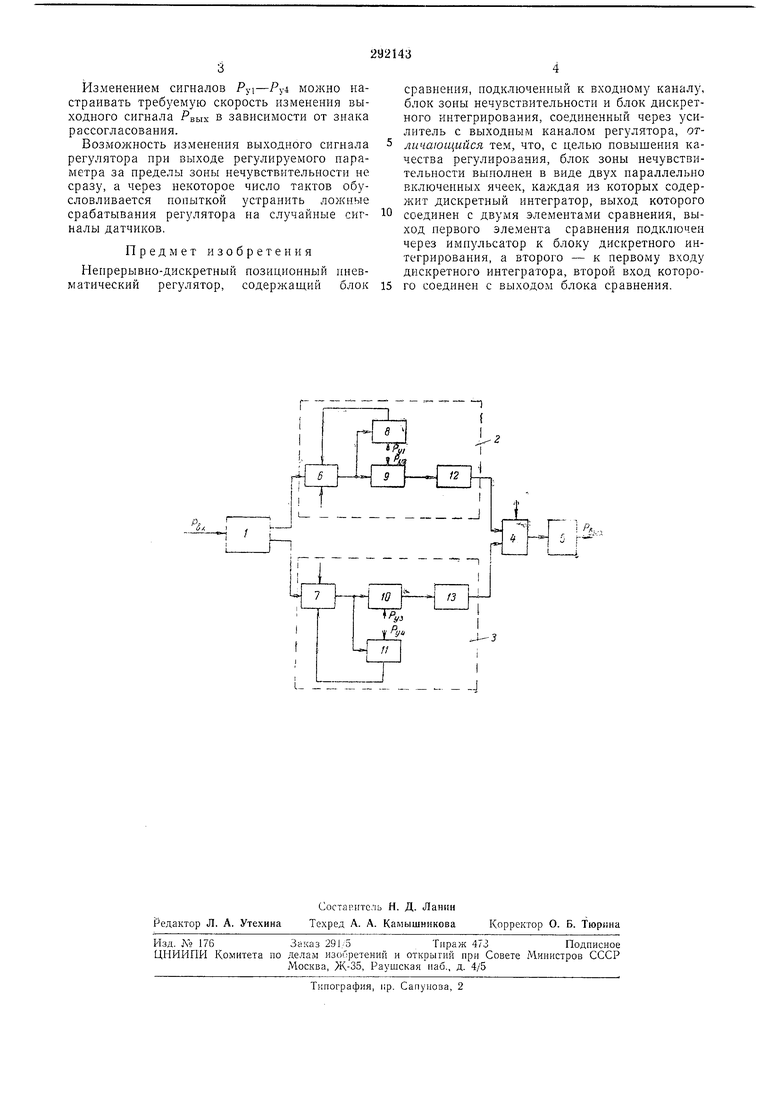
Схема устройства приведена на чертеже.
Регулятор состоит из блока сравнения /,
последовательно соединенного через ячейки 2
и 3 блока зоны иечувствительности с блоком
дискретного интегрирования 4 и усилителем 5.
Ячейки 2 и 3 содержат дискретные интеграторы 6 и 7, элементы сравнения 8-// и имиульсаторы 12 и 13.
Устройство работает следующим образом. При нахождении регулируемого параметра в зоне нечувствительности выходные сигналы блока 1 равны нулю, и выходной сигнал регулятора не изменяется. При выходе параметра за пределы зоны нечувствительности появляется сигнал «1 на одном из выходов блока 1. Выходной сигнал одного из дискретных интеграторов, например интегратора 6, начинает изменяться.
Сигнал на импульсатор 12 проходит через заданное число тактов, определяемое сигналом Ру2, на элемент 9. Далее по достижении выходным сигналом интегратора 6 значения Руь срабатывает элемент 8, сбрасывающий выход интегратора 6 на нуль. Далее процесс повторяется, пока входной сигнал Явх (параметр) не войдет в зону нечувствительности, т. е. пока не снимется выходной сигнал блока /.
Изменением сигналов Pyi-Ру4 можно настраивать требуемую скорость изменения выходного сигнала РВЫХ в зависимости от знака рассогласования.
Возможность изменения выходного сигнала регулятора нри выходе регулируемого параметра за нределы зоны нечувствительности не сразу, а через некоторое число тактов обусловливается попыткой устранить ложные срабатывания регулятора на случайные сигналы датчиков.
Предмет изобретения
Ненрерывно-дискретный позиционный пневматический регулятор, содержащий блок
сравнения, подключенный к входному каналу, блок зоны нечувствительности и блок дискретного интегрирования, соединенный через усилитель с выходным каналом регулятора, отличающийся тем, что, с целью повышения качества регулирования, блок зоны нечувствительности выполнен в виде двух параллельно включенных ячеек, каладая из которых содержит дискретный интегратор, выход которого
соединен с двумя элементами сравнения, выход первого элемента сравнения подключен через имиульсатор к блоку дискретного интегрирования, а второго - к первому входу дискретного интегратора, второй вход которого соединен с выходом блока сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ДИСКРЕТНЫЙ РЕГУЛЯТО ОПТИМАЛЬНОГО РЕЖИМА | 1971 |
|
SU432457A1 |
| Пневматический регулятор | 1978 |
|
SU840796A1 |
| Пневматический регулятор | 1979 |
|
SU849140A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Пневматическое управляющее устройство | 1983 |
|
SU1101789A1 |
| ПНЕВМАТИЧЕСКОЕ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО К ХРОМАТОГРАФУ | 1970 |
|
SU269592A1 |
| Пневматический следящий привод | 1981 |
|
SU968786A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| ПНЕВМАТИЧЕСКИЙ АВТОМАТИЧЕСКИЙ САМОНАСТРАИВАЮЩИЙСЯ РЕГУЛЯТОР | 1965 |
|
SU175757A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
1
J-5
J
