щими исполнительными механизмами, выход шагового интегратора связан с вторыми входами элементов сравнения обеих групп, а первые входы элементов сравнения второй группы связаны с выходами элементов:умножения на постоянный коэффициент блока задания временных уставок.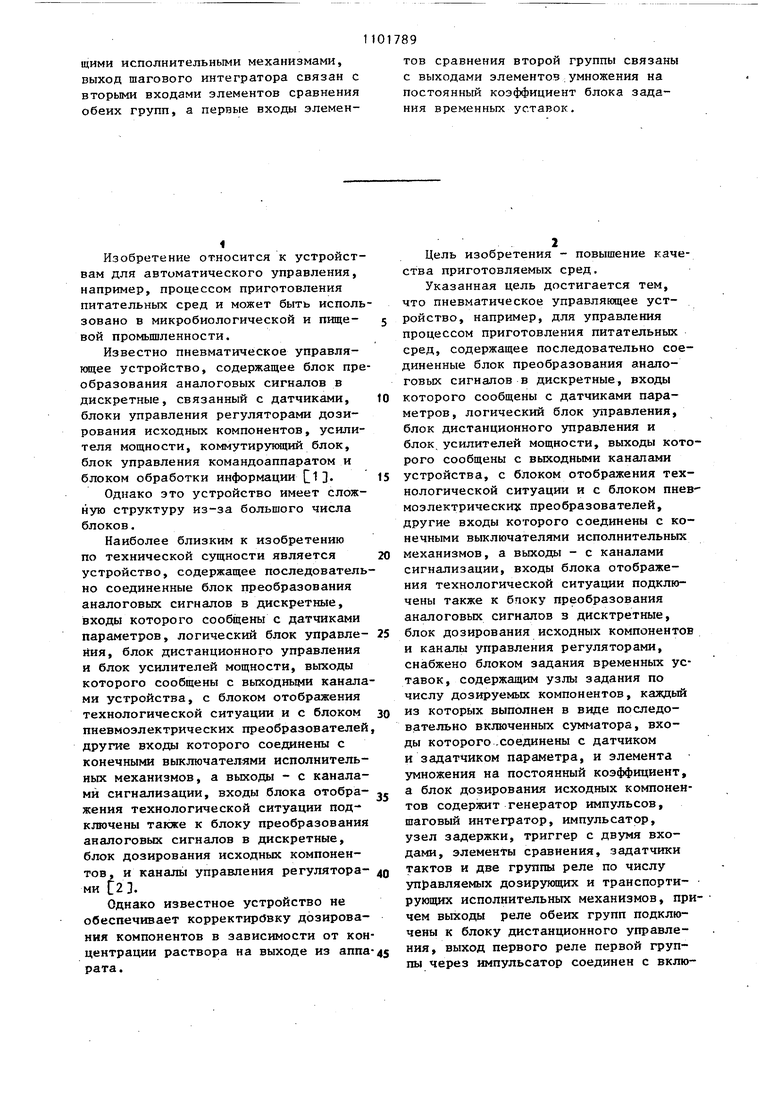
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический следящий привод | 1981 |
|
SU968786A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Устройство для многокомпонентного дозирования | 1984 |
|
SU1200256A1 |
| Пневматическое устройство для дистанционного управления грузоподъемной машиной | 1985 |
|
SU1286832A1 |
| Устройство для многокомпонентного дозирования компонентов синтетических моющих средств | 1990 |
|
SU1805454A1 |
| Многоканальный регулятор | 1979 |
|
SU873207A1 |
| Весовой порционный дозатор | 1979 |
|
SU823889A1 |
| Интегрирующее устройство | 1981 |
|
SU1010616A1 |
| Система автоматического управления работой дозатора | 1990 |
|
SU1747309A1 |
| Устройство для многокомпонентного порционного дозирования компонентов синтетических моющих средств | 1991 |
|
SU1784953A1 |
ПНЕВМАТИЧЕСКОЕ УПРАБЛЯЩЕЕ УСТРОЙСТВО, например, для управления процессом приготовления питательных сред, содержащее последовательно соединенные блок преобразования аналоговых сигналов в дискретные, входы которого сообщены с датчиками параметров, логический блок управления, блок дистанционного управлений и блок усилителей мощности, выходы которого сообщены с выходными каналами устройства, с блоком отображения технологической ситуации и с блоком пневмоэлектрических преобразователей, другие входы которого соединены с конечными выключателями исполнительных механизмов, а выходы - с каналами сигнализации, входы блока отображения технологической ситуации подключены также к блоку преобразования аналоговых сигналов в дискретные, блок дозирования исходных компонентов и каналы управления регуляторами, отличающее ся тем, что, с целью повышения качества приготовляемых сред, оно снабжено блоком задания временных уставок, содержащим узлы задания по числу дозируемых компонентов, каждый из которых выполнен в виде последовательно включенных сумматора, входы которого соединены с датчиком и задатчиком параметра, и элемента умножения на постоянный коэффициент, а блок дозирования исходных компонентов содержит генератор импульсов, шаговый интегратор, импульсатор, узел задержки, триггер с двумя входами, элементы сравнения задатчики тактов и две группы реле по числу управляемых транспортирующих и дозирующих исполнительных механизмов , причем выходы реле обеих групп подключены к блоку дистанционного управления, выход первого реле первой группы через импульсатор соединен с включающим входом триггера с двумя входами, выход которого со.общен с генератором импульсов, связанным своим выходом с шаговым интегратором, включающий вход первого реле первой группы соединен с соответствукщим выходом логического блока управления, включающие входы остальных реле обеих групп подключены к выхо00 дам элементов сравнения первой груп пы, первые входы которых соединены с задатчиками тактов, выключакхцие входы реле первой группы управления транспортирующими исполнительными механизмами, триггера с двумя входами и соответствующий вход логического блока управления подключены через узел задержки к выходу последне-. го элемента сравнения второй группы, выходы элементов сравнения которой соединены с выключающими входами реле второй группы управления дозирую
Изобретение относится к устройствам для автоматического управления, например, процессом приготовления питательных сред и может быть использовано в микробиологической и пище- вой промышленности.
Известно пневматическое управлякяцее устройство, содержащее блок преобразования аналоговых сигналов в дискретные, связанный с датчиками, блоки управления регуляторами дозирования исходных компонентов, усилителя мощности, коммутирукяций блок, блок управления командоаппаратом и блоком обработки информации Ql.
Однако это устройство имеет сложную структуру из-за большого числа блоков.
Наиболее близким к изобретению по технической сущности является устройство, содержащее последовательно соединенные блок преобразования аналоговых сигналов в дискретные, входы которого сообщены с датчиками параметров, логический блок управления, блок дистанционного управления и блок усилителей мощности, вьпсоды которого сообщены с выходными каналами устройства, с блоком отображения технологической ситуации и с блоком пневмоэлектрических преобразователей другие входы которого соединены с конечными выключателями исполнительных механизмов, а выходы - с каналами сигнализации, входы блока отображения технологической ситуации подключены также к блоку преобразования аналоговых сигналов в дискретные, блок дозирования исходных компонентов, и каналы управления регуляторами С23.
Однако известное устройство не обеспечивает корректировку дозирования компонентов в зависимости от концентрации раствора на выходе из anna рата.
Цель изобретения - повышение качества приготовляемых сред.
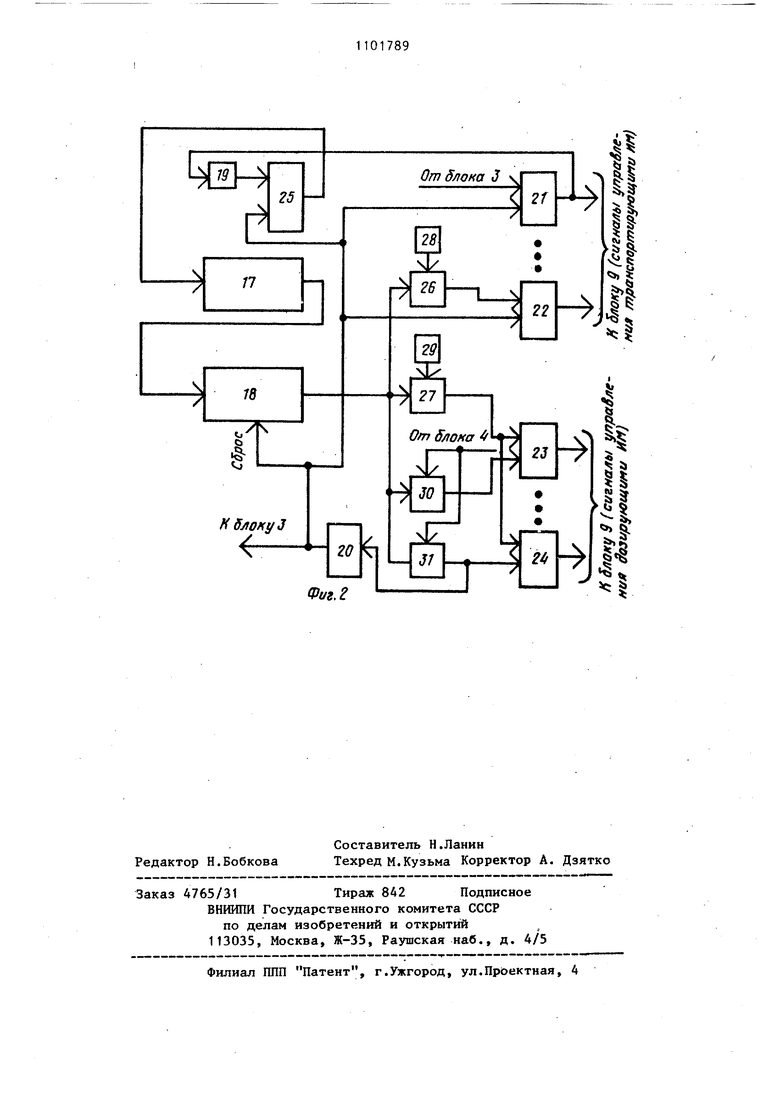
Указанная цель достигается тем, что пневматическое управляющее устройство, например, для управления процессом приготовления питательных сред, содержащее последовательно соединенные блок преобразования аналоговых сигналов в дискретные, входы которого сообщены с датчиками параметров, логический блок управления, блок дистанционного управления и блок усилителей мощности, выходы которого сообщены с выходными каналами устройства, с блоком отображения технологической ситуации и с блоком пнев моэлектрическиу преобразователей, другие входы которого соединены с конечными выключателями исполнительных механизмов, а выходы - с каналами сигнализации, входы блока отображения технологической ситуации подключены также к блоку преобразования аналоговых сигналов в дисктретные, блок дозирования исходных компонентов и каналы управления регуляторами, снабжено блоком задания временных уставок, содержащим узлы задания по числу дозируемых компонентов, каждый из которых выполнен в виде последовательно включенных сумматора, входы которого .соединены с датчиком и задатчиком параметра, и элемента умножения на постоянный коэффициент, а блок дозирования исходных компонентов содержит генератор импульсов, шаговый интегратор, импульсатор, узел задержки, триггер с двумя входами, элементы сравнения, задатчики тактов и две группы реле по числу управляемых дозирующих и транспортирующих исполнительных механизмов, причем выходы реле обеих групп подключены к блоку дистанционного управления, выход первого реле первой группы через импульсатор соединен с вклю31чающим входом триггера с двумя входа ми, выход которого сообщен с генератором импульсов, связанным своим выходом с шаговым интегратором, включа ющий вход первого реле первой группы соединен с соответствующим выходо логического блока управления, включа щие входы остальных реле обеих групп подключены к выходам элементов сравнения первой группы, первые входы ко торых соединены с задатчиками тактов выключающие входы реле первой группы управления транспортирующими исполнительными механизмами, триггера с двумя входами и соответствунщий вход логического блока управления подключены через узел задержки к выходу последнего элемента сравнения второй группы, выходы элементов сравнения которой соединены с выключающими входами реле второй группы управления дозирукщими исполнительными механизмами, выход щагового интегратора связан с вторыми входами элементов сравнения .обеих групп, а первые входы элементов сравнения второй группы связаны с выходами элементов умножения на постоянный коэффциент блока задания временных уставок. На фиг. 1 изображена блок-схема пневматического управляющего устройства для процессов приготовления питательных сред; на фиг. 2 - принципиальная схема блока дозирования исходных компонентов. Устройство содержит блок 1 преобразования аналоговых сигнгшов в дискретные, связанные с датчиками (н показаны), измеряющими качественные показатели управляемого процесса по каналам 2, логический блок 3 управления загрузкой растворителя, перемешиванием раствора, выгрузкой аппарата и при необходимости возврата обратно в аппарат части готового раствора питательной среды. Блок 4 задания временных уставок выполнен в виде параллельно включенных узлов задания по числу дозируемых компонен тов, каждый из которых состоит из сумматора 5 и элемента 6 умножения на постоянный коэффициент семь. К сумматорам 5 подключены каналы 7 от датчиков параметров и каналы 8 - от задатчиков (датчики и зат датчики не показаны). Блоки 1 и 4 связаны с логическим блоком 3 управления, подключенного 94 своими выходами через блок 9 дистанционного управления и блок 10 усилителей мощности к выходным каналам 11 управления. Выходы блока 10 соединены также с блоком 12 отображения технологической ситуации и с блоком 13 пневмозлектропреобразователей. Входы блока 13 также сообщены по каналам 14 с конечными выключателями (не показаны) исполнительных механизмов, а его выхода - с каналами 15 сигнализации, по которым информация передается на мнемосхему. Блок 9 сообщен с каналами 16 управления регуляторами. Блок 6 дозирования исходных компонентов состоит (фиг. 2) из генератора 17 импульсов, шагового интегратора 18, импульсатора 19, узла 20 задержки. Также в него входят две группы реле, первая из которых содержит реле 21 и 22 по числу управляемых транспортирзтощих исполнительных механизмов, а вторая группа реле 23 и 24 по числу дозирующих исполнительных механизмов. Выходы реле обеих групп подключены к блоку 9 дистанционного управления. Выход первого реле 21 первой группы через импульсатор 19 соединен с включающим входом триггера 25 с двумя входами, выход которого соединен с генератором 17 импульсов, связанным своим выходом с шаговым интегратором 18. Включакяций вход первого реле 21 первой группы соединен с соответствующим выходом логического блока 3 управления. Включающие входы остальных реле обеих групп подключены к выходам элементов 26 и 27 сравнения первой группы, первые входы которых соединены с задатчиками 28 и 29 тактов. Выключающие входы реле 23 и 24 второй группы соединены с выходами элементов 30 и 31 сравнения. Выключающие входы реле 21 и 22 первой группы управления транспортирующими исполнительными механизмами, триггера 25 .с двумя входами и соответствующий вход логического блока 3 управления подключены через узел 20 задержки к выходу последнего элемента 31 сравнения второй группы. Выход шагового интегратора 18 связан с вторыми входами элементов сравнения обеих групп, а первые входа элементов 30 и 31 сравнения связаны с выходами элементов умножения на постоянный коэффициент блока задания временных уставок. Пневматическое управляющее устрой ство работает следующим образом. На вход блока 1 преобразования аналоговых сигналов в дискретные поступают аналоговые сигналы от датчиков по каналам 2 измеряющих параметры управляемого процесса. Блок 1 осуществляет пороговое преобразование этих сигналов в двоичнодискретные пневматические сигналы, поступают на блок 3. По пусковому сигналу оператора, а также в зависимости от сигналов, определяемых с помощью датчиков и преобразованных блоков 1, блок 3 вырабатывает командные сигналы на управление загрузкой растворителя, двигателем перемешивающего устройства, выгрузкой аппарата, возврата части готового раствора, поступающих на блок 9 дистанционного управления, а также обес печивается включение в работу блока 6 Сигналы от датчиков концентраций ком понентов в растворе на выходе из аппаратов при последовательной их выгрузке передаются по каналам 7 на вход блока 4. Блок А задания временных уставок обрабатьгоает эти сигналы в соответствии с формулой РвыхГ cii (РЭОАГ Pi ) + Qi пневматический сигнал, про порциональный заданной кон центрации соответствуницего полезного компонента в растворе питательных солей Р- - сигнал, соответствующий те кущей концентрации соответ ствующего компонента в раство ре питательных солей, Qj- опорное давление; коэффициент пропорциональности Блок 6 обеспечивает выдержки времени работы дозирующих механизмов, заданные блоком 4, и управление дозируницими и транспортирующими механизмами в определенной последователь ности (запуск механизмов дозирующетранспортной .системы осуществляется в порядке, обратном их расположению т.е. последними включаются дозаторы) Блок 6 работает следующим образом По сигналу от блока 3 срабатывает реле 21, запуская в работу оконечньй транспортируклций механизм, и через импульсатор 19 и триггер 25 осуществ ляется включение; генератора 17 импульсов, выход которого подключен к шаговому интегратору 18. После каждого импульса выходное давление интегратора 18 увеличивается на выбранную величину шага. Выход интегратора подключен к вторым входам элементов 26, 27, 30 и 31 сравнения. Давления, при которых срабатывают элементы 26 и 27 сравнения, обеспечивающие запуск в работу в определенной последовательности как транспортирующих, так и дозирующих механизмов, выбираются задатчиками 28 и 29, подключенных к первым входам элементов 26 и 27 сравнения, при этом последовательно срабатывают реле 22-24. Время работы дозирующих механизмов определяется делениями заданий, поступающих от блока 4 в первые входы элементов 30 и 31 сравнения. При превышении давления на выходе шагового интегратора заданий, поступающих от блока 4, по сигналам от элементов 30 и 31 сравнения производится отключение дозирующих механизмов через вьпсодные реле 23 и 24. Следовательно, чем вьш1е давление задания на отключение дозирующих механизмов, тем больше длительность их работы. Благодаря узлу 20 производится задержка отключения транспортирующих механизмов на время, необходимое для транспортирования остатка сухих солей в аппарат. После отключения транспортирующих механизмов блок 6 вырабатывает сигнал на блок 3 и воз- воащаётся в исходное состояние. В автоматическом режиме работы сигналы на выходе блока 9 дистанционного управления повторяют сигналы, поступающие от блоков 3 и 6, а в дистанционном режиме - сигналы от органов дистанционного управления. Сигналы с выхода блока 9 дистанционного управления поступают через блок 10 усилителей мощности на исполнительные механизмы по каналам 11, а также на входы блока 12 отображения технологической ситуации и блока 13 преобразования пневматических сигналов в электричестве. В зависимости от этих сигналов и сигналов, поступающих с блока 1, блок 12 отображения технологической ситуации формирует символические образы технологической ситуации. Блок 13 преобразования пневматических сигналов в электрические формирует сигналы, оповещающие на мнемосхеме о неисправностях исполнитель ных механизмов с указанием места неисправности, путем логического
г
ч.
vl/ 1/
/
ч/
/
10
Г2
/ / /
у //
сравнения сигналов от блока 9 дистан{- ционного управления с сигналами от , конечных выключателей, установленных на исполнительных механизмах.
7
ч
16
К регуляторам 7
J/ UjAl/
k
J На ннемосхему
Фиг.1
Л
1,
/
IS
Ч
(J
I
Н блоку J
( (l Фиг. 2
27
От 5лока
2j
il
JO й|
-1
L
f
|1
j;
1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU287432A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пневматическое управляющее устройство | 1974 |
|
SU529206A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
