(54) ПНЕВМАТИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический привод | 1982 |
|
SU1115018A1 |
| Пневматический адаптивный регулятор | 1977 |
|
SU656022A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU1001006A1 |
| ПНЕВМАТИЧЕСКИЙ УПРАВЛЯЕМЫЙ ИНТЕГРАТОР | 1969 |
|
SU239673A1 |
| Пневматическое устройство для управления процессом дозирования | 1985 |
|
SU1270753A2 |
| Пневматический дозатор | 1984 |
|
SU1290271A1 |
| ПНЕВМАТИЧЕСКИЙ ДВУХКАНАЛЬНЫЙ ОПТИМИЗАТОР | 1972 |
|
SU419849A1 |
| Пневматический генератор импульсов | 1980 |
|
SU950977A1 |
| Пневматический двухпозиционный регулятор с настраиваемой зоной нечувствительности | 1989 |
|
SU1755256A1 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
Изобретение относится к автоматике и может быть использовано в сиетемах автоматического управления технологическими производствами.
Известен следящий привод, содержащий блок управления, узел обратной связи и поршневой исполнительный механизм 1 . .
Недостатком известного устройства является сложность сочленения его с регулирующими орга.нами, имеющими вращательное движение.
Наиболее близким к изобретению по технической сущности и достигаемому эффекту является пневматический следящий приврд, содержащий блок управления, узел обратной связи и реверсивный пневматический шаговый двигатель 2.
Однакй при высокой заданной точности (малая зона нечувствительности ) происходит частое реверсивное срабатывание пневматического шагового привода, что приводит к быстрому изнашиванию механизма. Увеличивание зоны нечувствительности повышает статическую ошибку следя1цего привода. Кроме того, привод обладает постоянством скорости перемещения внезависимости от величины рассогласования на входе блока управления..
Целйю изобретения является- повышение надежности и увеличение динамических характеристик пнейматического следящего привода.
Указанная цель достигается тем, что в пневматическом следящем приводе , содержащем блок управления,
10 канал сигнала задания, узел обратной связи, связанный с выходным валом реверсзивного пневматического шагов.ого двигателя, блок управления ; содержит интегратор, первый -и вто15рой элементы сравнения, первый, второй и третий задатчики, первое, второе и третье реле, элемент.ИЛИ, первый и второй клапаны, переменный дроссель, причем первый вход
20 интегратора подключен к каналу сигнала задания, а второй вход интегратора соединен с выходом узла обратной связи, выход интегратора соединен с минусовой камерой первого
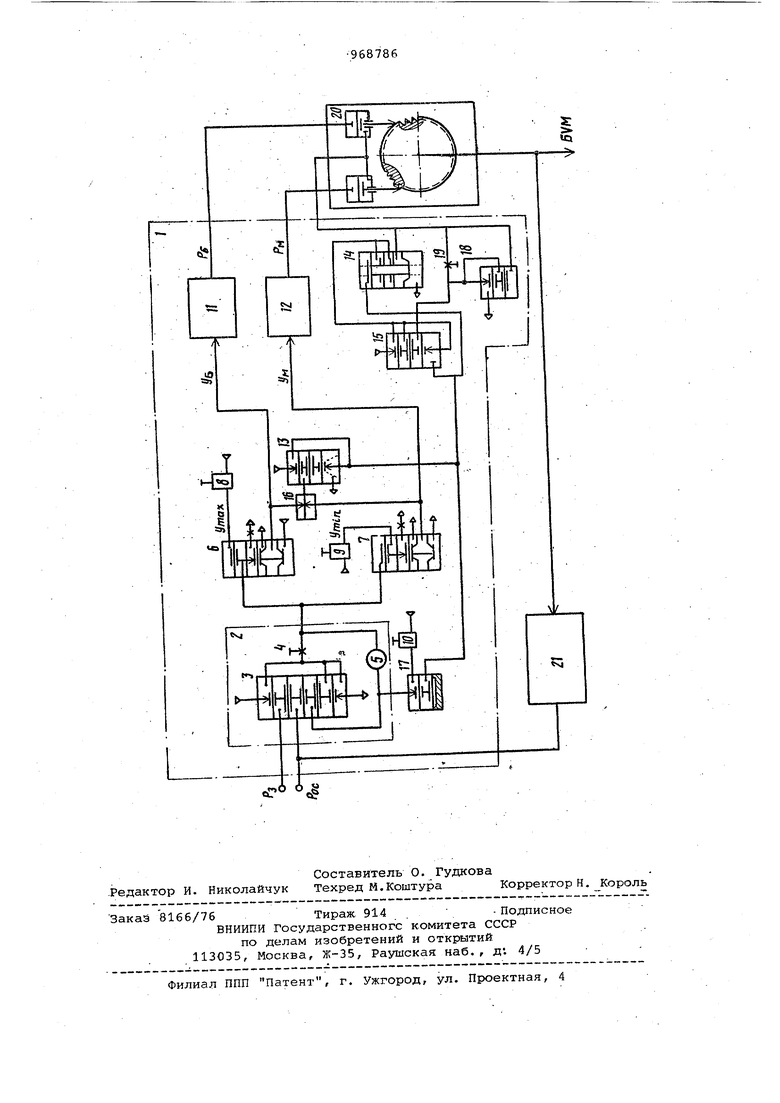
25 элемента сравнения и с плюсовой ка мерой второго элемента сравнения, выход первого задатчика подключен к плюсовой ) камере первого элемента сравнение, а выход второго задатчи30 ка соединен с минусовой камерой вто- / рого элемента сравнения, выход первого элемента сравнения соединен с первым входом элемента ИЛИ и первым входным управляющим каналом реверсив ного пневматичес кого шагового двига теля, выход второго элемента сравнения подключен к второму входу эле мента ИЛИ и второму входному управляющему каналу реверсивного пневматического шагового двигателя, выход элемента ИЛИ соединен с плюсовой камерой первого реле, выход которого подключен к проточной камере третьего реле, минусовой камере второго реле и управляющей камере первого клапана/ проточная камера которого соединена с выходом третьего задатчика, а выход первого клапана подключен к выходу интегратора, выход третьего реле соединен с плюсовой камерой и камерой питания второго реле, выход которого подключен к входному каналу реверсивного пневматического шагового двигателя, к камере подпора второго клапана через переменный дроссель, к минусовой камере третьего реле, к соплу и управляющей камере второго клапана, проточная камера которого сообщена с атмосферой. На чертеже представлена схема пневматического следящего привода.. Пневматический следящий привод содержит блок 1 управления, включаю щий интегратор 2, для примера реа.лизованный на четырехвходовом элементе 3 срав.нения, переменный дроссель 4 и пневмоемкости 5., первый 6 и второй 7 элементы сравнения, первый 8, второй 9 и третий 10 задатчи ки, первый 11 и второй 12 усилители мощности, первое 13, второе 14 и третье 15 реле, элемент Щ1И 16, пер вый 17 и второй 18 клапаны, перемен ный дроссель 19, реверсивный пневматический шаговый двигатель 20, узел 21 обратной связи, канал сигна ла задания р и канал обратной св зи РОС . Элементы 14; 15, 18 и 19 реализу ют фукцию импульсатора, срабатывающего по .заднему фронту единичного сигнала. Устройство работает следующим об разом. При разбалансе сигнала задания P и сигнала узла 21 обратной связи PQ т.е. PJ - POJ. 7i О, на входе блока 1 управления, на выходе интегратора 2 (точка Р) давление начинает расти или падать в зависимости от условного нуля, величина которого задает ся задатчиком 10 и коммутируется на вход элемента 3 сравнения с помощью клапана 17. Дроссель 4 позволяет ус танавливать скорость изменения-выходного сигнала интегратора 2. Выходное давление интегратора РЦ сравнивается на элементах 6 и 7 сравнения с давлением уставок так и У.;„, формируемых задатчиками 8 и 9. При достижении сигналом Pj, значения большего Y или меньшего Y.,-,, на выходах элементов 6 или 7 сравнения появляются дискретные сигналы, равные Yg или У. Сигналы Yg или Y| , усиленные по мощности усилителями 11 и 12 давления (Pg или Р), поступают на входные управляющие каналы реверсивного шагового двигатетеля 20, заставляя вращаться его выходной вал по часовой стрелке (Б) или против часовой стрелки (м). Выходной вал ревесивного пневматического шагового двигателя связан с входным валом узла 21 обратной связи. Угол поворота вала узла 21 обратной преобразовывается в давление PQ , которое поступает на интегратор 2 блока 1 управления. Сигнал YO, сформированный элементом ИЛИ 16 и усиленный по мощности реле. 13, является управляющим для клапана 17. При включении клапана 17 давление на выходе интегратора 2 становится равным давлению условного нуля, т.е. величине давления задатчика 10, и схема управления принимает исходное состояние. Одновременно сигнал YQ включает элемент памяти - реле 15 и блокирует реле. При возврате схемы в исходное состояние на выходе реле 14 появляется-сигнал, равный 1, который используется как управляющий сигнал обратного хода привода реверсивного пневматического шагового двигателя 20. Этот участок применим в случае отсутствия пружины обратного хода привода двигателя. Длительность сигнала на выходе реле 14 изменяется дросселем 19. Клапан 18 сообщает с атмосферой последроссельный объем при отсутствии выходного сигнала реле 14. При сохранении разбаланса на входе интегратора 2 цикл повторяется. Выходной вал вращается до тех пор, .пока не будет выполнено условие Р J - РОС 0. С помощью дросселя 4 и изменяемой зоны нечувствительности, задаваемой задатчиками 8 и 9, можно выбрать необходимую скорость движения привода в зависимости от величины разбаланса на входе интегратора, отфильтровать высокочастотные помехи и менять скорости движения привода при разных знаках разбал.анса входных величин. Формула изобретения Пневматический следящий привод, содержащий блок управления, канал
сигнала задания, узел обратной связи, связанный с вцходным валом реверсивного пневматического шагового двигателя, отличающийся тем, что, с целью повышения надежности и улучшения.динамических характеристик привода, блок управления содержит интегратор, первый и второй элементы сравнения, первый, второй и третий задатчики, первое, второе и третье реле, элемент ЮТИ, первый и второй клапаны, переменный дроссель , причем первый вход интегратора подключен к каналу сигнала задания, а второй вход интегратора соединен с выходом узла обратной свжзи, выход интегратора соединен с минусовой камерой первого элемента сравнения и с плюсовой камерой второго элемента сравнения, выход первого задатчика подключен к плюсовой камере первого элемента сравнения, а выход второго задатчика соединен с минусовой камерой второго элемента сравнения, выход первого элемента сравнения соединен с первым входом элемента ИЛИ и первым входным управляющим каналом реверсивного пневматического шагового двигателя, выход второго элемента сравнения подключен к второму входу элемен;Та ИЛИ и второму входному управляющему каналу реверсивного пневматического шагового двигателя, выход элемента ИЛИ соединен с плюсовой ка мерой первого реле, выход-которого подключен к проточной камере третьего реле, минусовой камере второго реле и управляющей камере первого клапана, проточная камера которого соединена свыходом третьего задатчика, а выход первого клапана
подключен к выходу интегратора, выход третьего реле соединен с плюсовой камерой и камерой питания второго реле, выход которого подключен к входному каналу реверсивного пневматического шагового двигателя, к камере подпора .второго клапана через переменный дроссель, к минусовой камере третьего реле,.к соплу и управляющей камере второго клапана, проточная камера которого сообщена с атмосферой.
Источники информации, принятые во внимание при экспертизе Автоматические приборы, регулятора и вьочислительные системы. Сборник под ред. Комарского Б.Д. Л., Машиностроение, 1976, с. 17. 2. Авторское свидетельство СССР № 370585,кл. G 05 В 11/52,1972 (прототип)
