Известны автоматические регуляторы загрузки самоходного зерноуборочного комбайна, содержащие датчик толщины слоя хлебной массы, поступающей в комбайн, а также датчик крутящего момента на валу молотильного барабана и суммирующее устройство в виде рычага, связанного тягами с датчиками и с золотником исполнительного механизма, воздействующего на механизм управления вариатора ходовой части комбайна.
Целью настоящего изобретения является повыщение быстрод.ействия регулятора в случае перегрузки молотильного устройства вследствие изменения свойств убираемой хлебной массы. Это достигается тем, что на тяге регулятора, связывающей датчик крутящего момента на валу молотильного барабана с рычагом суммирующего устройства, установлен упор, взаимодействующий с упором, установленным на тяге, связывающей этот рычаг с золотником.
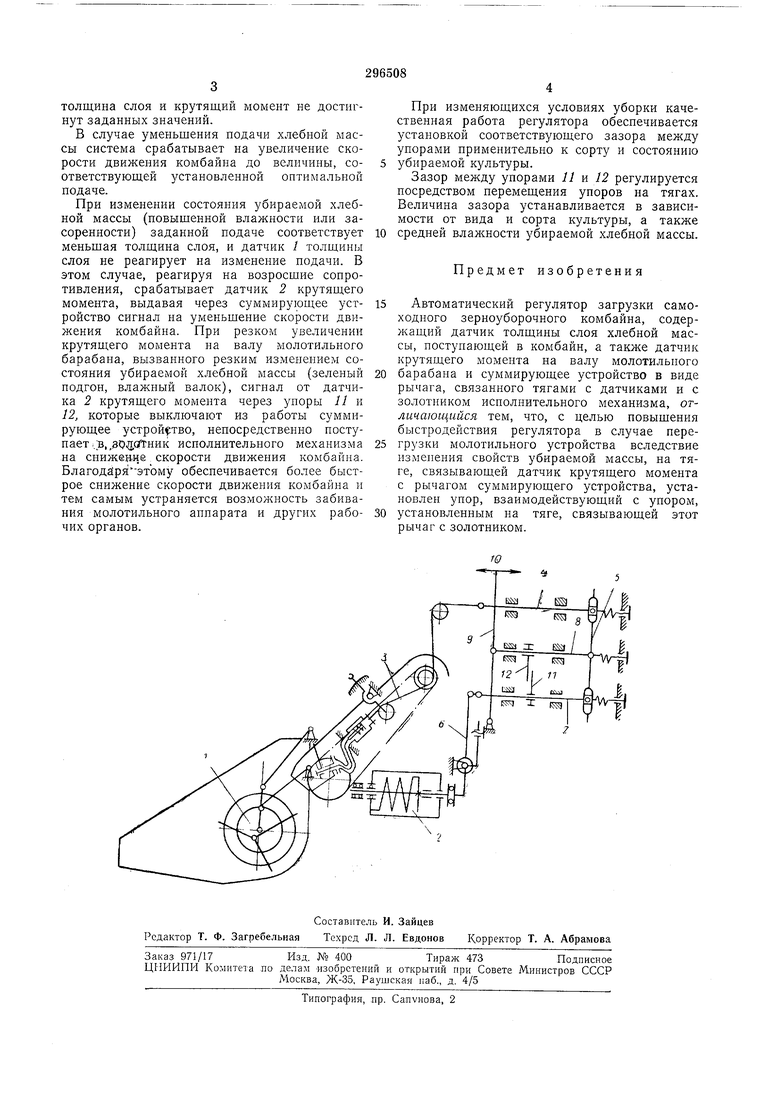
На чертеже схематически изображен предлагаемый регулятор.
Регулятор содержит датчик 1 толщины слоя хлебной массы, представляющий собой щнек жатки, выполненный плавающим по высоте в зависимости от толщины слоя хлебной массы, поступающей в кол1байн, а также датчик 2 механического тща, установленный -, - валу молотильного барабана. Датчик 1 связан гибким элементом 3 и тягой 4 с рычагом 5 суммирующего устройства, а датчик 2 - рычагом 6 с тягой 7. Рычаг 5 суммирующего устройства связан тягой 8 с рычагом Я управляющим золотником 10. На тягах 7 и 8 имеются упоры 11 и 12.
Регулятор при уборке сухой и соломистой хлебной массы работает следующим образзом. В случае увеличения подачи сверх оптимальной плавающий щнек жатки, являющийся датчиком 1, под воздействием увеличивщейся толщины слоя приподнимается. При этом сигнал отклонения через гибкий элемент 3, тягу 4, рычаг 5, тягу 8 передается в золотник исполнительного механизма регулятора, и скорость движения комбайна уменьщается. Крутящий момент на валу молотильного барабана увеличивается. Сигпал отклонения датчика крутящего момента через рычаг 6 передается па тягу 7. Сигналы отклонения от датчика 1 толщины слоя и датчика 2 крутящего момента суммируются, и выработанный в суммирующем устройстве сигнал рассогласования передается через тягу 8 в золотник исполнительного механизма, в результате чего происходит дальнейщее уменьщение скорости движения комбайна. Это будет продолжаться до тех пор, пока толщина слоя и крутящий момент не достигнут заданных значений. В случае уменьщения подачи хлебной массы система срабатывает на увеличение скорости движения комбайна до величины, со- 5 ответствующей установленной оптимальной подаче. При изменении состояния убираемой хлебной массы (повыщенной влажности или засоренности) заданной подаче соответствует ю меньшая толщина слоя, и датчик 1 толщины слоя не реагирует на изменение подачи. В этом случае, реагируя на возросшие сопротивления, срабатывает датчик 2 крутящего момента, выдавая через суммирующее уст- 15 ройство сигнал на уменьшение скорости движения комбайна. При резком увеличении крутящего момента на валу молотильного барабана, вызванного резким изменением состояния убираемой хлебной массы (зеленый 20 нодгон, влажный валок), сигнал от датчика 2 крутящего момента через уноры Ни 12, которые выключают из работы суммирующее устройство, непосредственно постуnaeT i.e J GCtHnK исполнительного механизма 25 на снижен-ие скорости движения комбайна. Благодаря этому обеспечивается более быстрое снижение скорости движения комбайна и тем самым устраняется возможность забивания молотильного аппарата и других рабо- 30 чих органов. При изменяющихся условиях уборки качественная работа регулятора обеспечивается установкой соответствуюш.его зазора между упорами применительно к сорту и состоянию убираемой культуры. Зазор между упорами 11 и 12 регулируется посредством перемещения упоров на тягах. Величина зазора устанавливается в зависимости от вида и сорта культуры, а также средней влажности убираемой хлебной массы, Предмет изобретения Автоматический регулятор загрузки самоходного зерноуборочного комбайна, содержащий датчик толщины слоя хлебной массы, поступающей в комбайн, а датчик крутящего момента на валу молотильного барабана и суммирующее устройство в виде рычага, связанного тягами с датчиками и с золотником исполнительного механизма, огличающийся тем, что, с целью повышения быстродействия регулятора в случае перегрузки молотильного устройства вследствие изменения свойств убираемой массы, на тяге, связывающей датчик крутящего момента с рычагом суммирующего устройства, установлен упор, взаимодействующий с упором, установленным на тяге, связывающей этот рычаг с золотником.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЗАГРУЗКОЙ ЗЕРНОУБОРОЧНОГО КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312485C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДАЧИ ХЛЕБНОЙ МАССЫ В ЗЕРНОУБОРОЧНЫЙ КОМБАЙН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2229208C1 |
| ЖАТКА С АВТОМАТОМ ЗАГРУЗКИ МОЛОТИЛЬНОГО БАРАБАНА | 1992 |
|
RU2065682C1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ЗАГРУЗКИ МОЛОТИЛКИ САМОХОДНОГО ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1969 |
|
SU250577A1 |
| Зерноуборочный комбайн | 1981 |
|
SU959670A1 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2004 |
|
RU2267250C1 |
| Система регулирования загрузки зерноуборочного комбайна | 1982 |
|
SU1142034A1 |
| Устройство для контроля и оценки работы зерноуборочных комбайнов | 1987 |
|
SU1482572A1 |
| ТРАНСПОРТЕР ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1972 |
|
SU345644A1 |
| Зерноуборочный комбайн с очесывающей жаткой | 2020 |
|
RU2744619C1 |
