В известных датчиках угла атаки с пневмометрическими насадками угол атаки замеряется с помощью двух плоских флюгарок - крылышек с взаимно нернендикулярными осями вращения, укрепленными на цилиндрическом насадке. Из-за взаимного влияния флюгеров и влияния на них насадка при несимметричном обтекании воздушным потоком возможны ошибки в определении углов атаки, особенно при сверхзвуковом потоке.
Описываемый датчик отличается от известных тем, что в нем флюгарка выполнена в внде полого конуса, в вершине которого закреплен насадок, а внутри размещен связывающий насадок со штангой двухстепенной шарпир, на котором установлены нотенциометрнческие датчики.
Это дает возможность снизить погрешность измерения, вызванную несимметричностью обтекания датчика потоком.
Предлагаемый датчик углов атаки позволяет исключить погрешности замера, обусловленные несимметричностью обтекания.
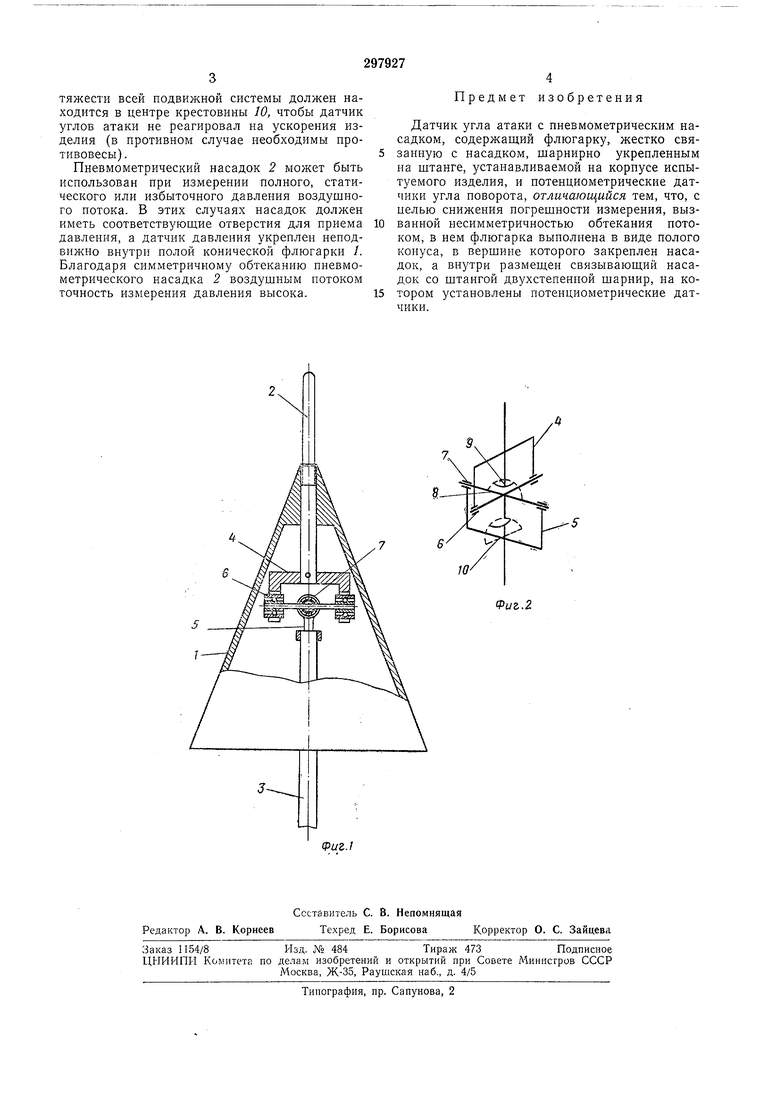
На фиг. 1 схематично изображен описываемый датчик (разрез); на фиг. 2-двухстепенной шарнир с потенциометрическими датчиками.
шарнира со штангой 3, укрепляемой на корпусе испытуемого изделия, углы атаки которого нужно замерить. Насадок 2 соединен с флюгаркой 7 с помощью резьбы и центрируется скользящей посадкой. Двухстепенной шарнир (см. фиг. 2) состоит из вилок 4 и 5, соединенных между собой через подшипники 6 и 7 крестовиной 8. На двухстепенном шарнире укреплены потенциометрические датчики 9 и 10 углов поворота шарнира.
Центр давления воздушного потока на обтекаемую им коническую флюгарку / должен находиться за крестовиной 8 в широкой части флюгарки на ее оси. В этом случае коническая флюгарка всегда располагается по потоку, и по отношению к ней обтекание симметрично. Насадок 2 и вилка 4 параллельны воздушному потоку. Вилка 5 и штанга 3 параллельны продольной оси изделия. Углы атаки изделия в двух взаимно перпендикулярны.х плоскостях определяется углами поворота крестовины 8 относительно вилок 4 и 5. Измеряя указанные углы поворота с помощью электрических потенциометрическнх датчиков, укрепленных на двухстепенном шарнире, можно получить значения углов атаки. Потенциометрические датчики следует укреплять так, чтобы вилка 4 была нагружена весовыми инерционными силами симметрично. Центр
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК АЭРОДИНАМИЧЕСКИХ УГЛОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1973 |
|
SU466786A1 |
| Шарнирный механизм манипулятора | 1985 |
|
SU1268412A1 |
| Колесно-шагающий движитель транспортного средства | 1982 |
|
SU1110708A1 |
| Способ измерения параметров потока и устройство для его осуществления | 1984 |
|
SU1278721A1 |
| ГИБКАЯ ВОЛНОВОДНАЯ СЕКЦИЯ | 1982 |
|
SU1840291A1 |
| Аэродинамические тензометрические весы | 1983 |
|
SU1099108A1 |
| Транспортное средство | 1989 |
|
SU1661047A1 |
| 5ИЕПИО'-'11ИА | 1973 |
|
SU366121A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ АЭРОДИНАМИЧЕСКОГО УГЛА С ИСПОЛЬЗОВАНИЕМ СЛЕДЯЩЕЙ СИСТЕМЫ УПРАВЛЕНИЯ | 2007 |
|
RU2346284C1 |
| СПОСОБ ГРАДУИРОВКИ ДАТЧИКА АЭРОДИНАМИЧЕСКОГО УГЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2277698C1 |
