1
Изобретение относится к датчикам пилотажно-навигационных параметров и предназначено для измерения местных аэродинамических углов летательного аппарата, а также для аэродинамических, газодинамических и аэрофизических исследований.
Для измерения аэродинамических углов обычно применяются флюгерные и пневматические датчики.
Однако флюгерные датчики при взлете, посадке и не больших высотах работают неустойчиво и не могут выполнять функции измерителей аэродинамических углов, обладают низким порогом чувствительности, в полете подвержены вибрации (флаттеру), имеют малый срок службы (перетирания проволоки потенциометра), и большую зону застоя (момент трогания 40-70 г/сж), пневматические датчики характеризуются большой постоянной времени из-за наличия длинных воздушных магистралей; кроме того, примеиение для измерения разности давлений упругих чувствительных элементов, которые работают в колебательном режиме за счет пульсаций давления в приемных отверстиях, в условиях воздействия ускорений и вибраций, изменений упругости чувствительного элемента под влиянием температуры окружаюш,ей среды, вызывает значительные погрешности.
Цель изобретения - повысить надежность датчика в работе, уменьшить пульсацию давления в приемных отверстиях повысить точность измерения и расширить диапазон измеряемых аэродинамических углов.
Предлагаемый датчик отличается от известного тем, что в цилиндрическом насадке размендена проточная пневматическая камера, которая соединена с приемными отверстиями каналами. Кроме того, в каналах на входе в камеру установлены две системы капсул с термоанемометрическими преобразователями. Входные отверстия имеют ловушки для влаги и механических частиц, которые работают на иринципе аэродинамической сепарации. Для ноддержанпя насадка но направлению воздуншого потока применяется следяп;ая система, управляюшим сигналом которой является электрический сигнал термоанемометрических систем.
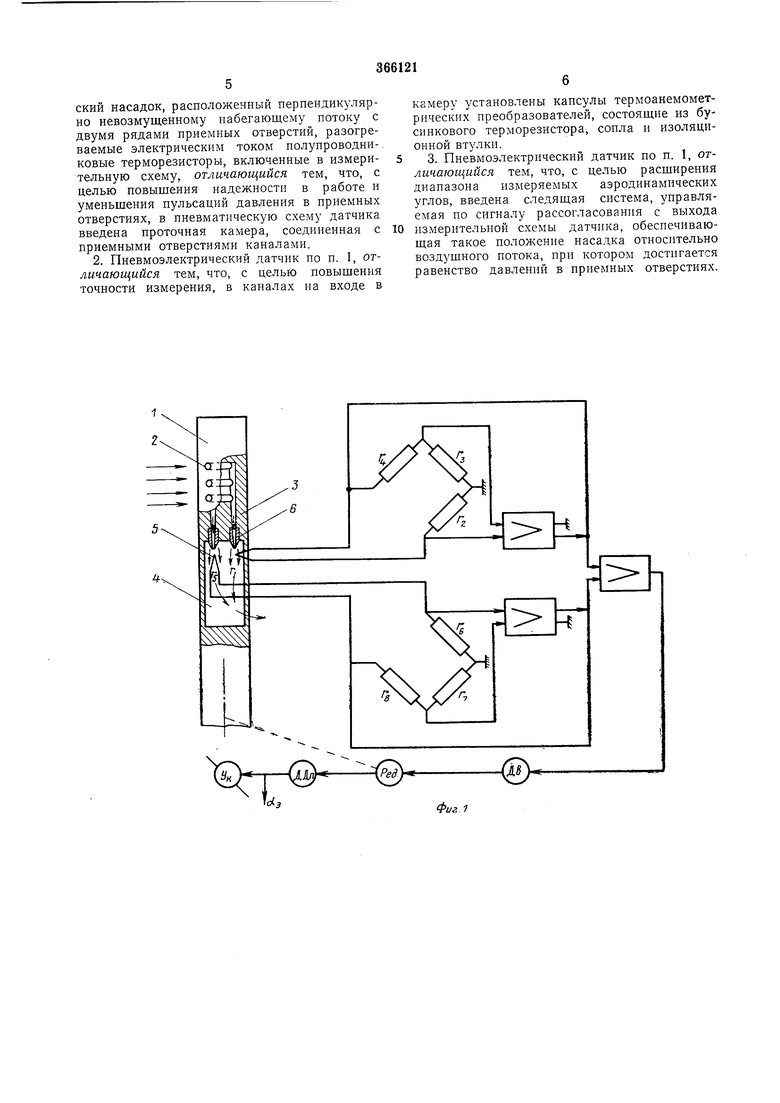
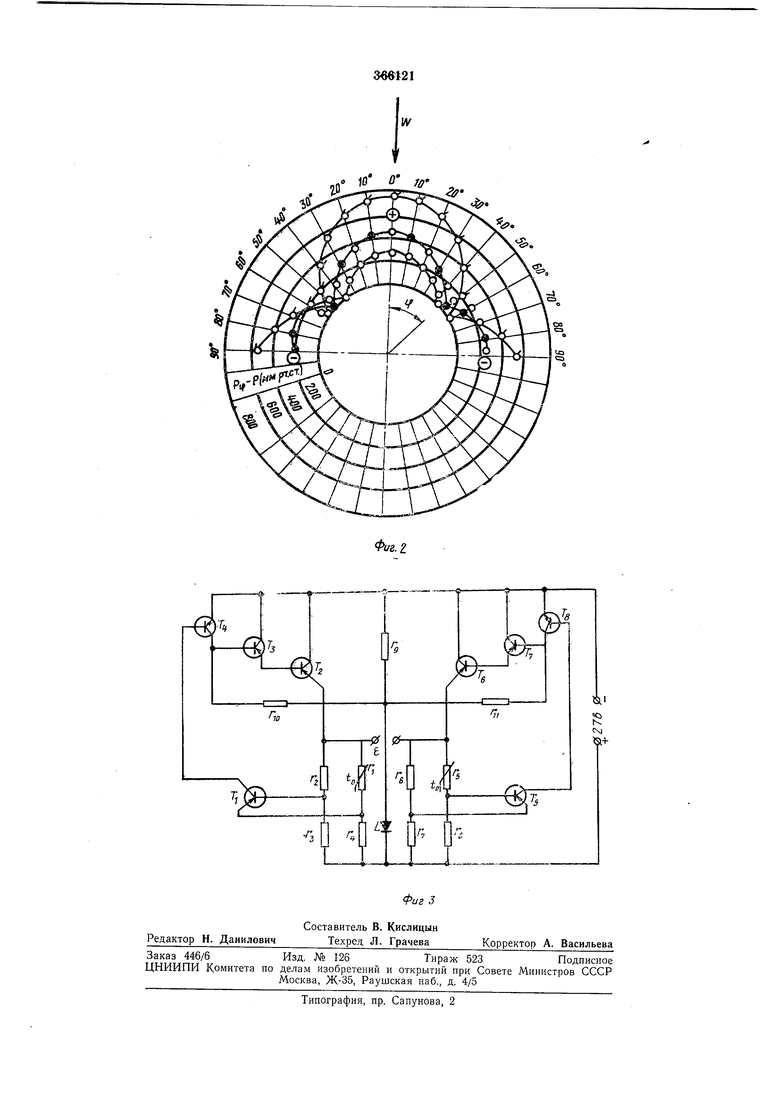
На фиг. 1 изображена принципиальная схема предлагаемого пневмоэлектрического датчика; на фиг. 2 - диаграмма распределения
давления по новерхностн цилиЕадрического насадка нри поперечном обтекании воздушным потоком, где зона повышенных давлений (), зона разрежения (Рс(Р), О-А, 0,720, ,86; ,996, где Я -приведенная скорость воздушного потока; на
фиг. 3 - принципиальная электрическая схема датчика.
Предлагаемый пневмоэлектрический датчик аэродинамических углов состоит из корпуса, в котором размещены двигатель, блок усилителей, редуктор, выходной преобразователь, и цилиндрического насадка / диаметром 15 мм и длиной 120 мм. На поверхности цилиндрического насадка просверлены два ряда (по образующей) приемных отверстий 2.
Угол между приемными отверстиями равен 70-80°. Приемные отверстия горизонтальными кгтналами 3 сообщаются с проточной камерой 4. На входе в камеру в горизонтальные каналы ввернуты капсулы с термоанемометрическими преобразователями, который состоит из бусинкового терморезистора 5j сопла 6 и изоляционной втулки для установки терморезисторов.
Цилиндрический насадок выполнен из нержавеющей стали или титана, имеет фланец для крепления к ведомому валику и канал для размещения теплоэлектронагревательиого элемента.
Предлагаемый пневмоэлектрический датчик работает следующим образом.
Датчик необходимо установить так, чтобы цилиндрический насадок / выступал за общивку летательного аппарата и был расположен перпендикулярно к воздущному потоку в том месте фюзеляжа, где обычно не возникает возмущений потока, например в носовой части фюзеляжа. При изменении положения летательного аппарата изменяется давление по контуру поверхности цилиндрического насадка / датчика в месте расположения приемных отверстий.
Работа датчика основана на связи давлений, воспринимаемых приемными отверстиями с углом атаки. Эта связь может быть выражеиа общеизвестным уравнением
/Га - , РУ
а
где - давления в двух точках поверхности цилиидрического насялка:
а - угол атаки;
PV
-- - динамический напор;
i
К. - постоянный коэффициент, определяемый угловым положением приемных отверстий.
Дальнейшее преобразование давлений в электрический сигнал осуществляется термоанемометрическим преобразователем Лт :/(А/).
Угол атаки летательного аппарата измеряется компенсационным методом, сущность которого заключается в следующем. Корпус датчика жестко крепится к конструкции летательного аппарата, а цилиндрический насадок имеет следящее устройство. При полете летательиого аппарата по цилиндрической поверхности насадка распределяется давление,
величина которого в каждой точке поверхности будет зависеть от динамического нанора и полярного угла. Давления в симметричных точках поверхности (приемных отверстиях) равны, следовательно, терморезисторы находятся в одинаковых условиях, т. е. коэффициенты рассеяния приблизительно одинаковы.
При изменении положения летательного аппарата изменяется давление в приемных
отверстиях. Появивщаяся разность давлений приводит в работу электрическую схему датчика.
Электрическая схема датчика (см. фиг. 3) состоит из двух идентичных самобалансирующихся мостовых схем, работающих в режиме постоянного сопротивления (r const), сущность работы которых можно уяснить, обративщись к уравнению баланса энергии терморезистора, если его записать так:
Q (Г-г„),
at
где Ct - теплоемкость терморезистора; Т - температура терморезистора; /2/ - мощность, потребляемая терморезистором;
Я-коэффициент рассеяния терморезистора;
Го - температура окружающей среды;
Если ток тем или иным способом изменять во времени так, чтобы при любых значениях коэффициента рассеяния иравая часть этого уравнения была близка нулю, то сопротивление (температура) терморезистора будет мало отличаться от заданного, т. е. того сопротивления, при котором создается баланс моста.
Схема датчика имеет два усилителя обратной связн, которые позволяют автоматически компенсировать величину колебаний сопротивлеиия терморезисторов.
Полностью устранить эти колебания с помощью статической обратной связи нельзя, так как именно они являются нричиной их же компенсации.
Выходной сигнал е подается на усилитель следящей системы, которая поворачивает цилиндрический насадок по направлению вектора воздуишого потока так, чтобы давления в приемных отверстиях были равны.
Угол поворота цилиндрического насадка передается датчиком дистанционной передачи на указатель и другие системы автоматики летательного аппарата.
Предмет изобретения
I. Пиевмоэлектрический датчик аэродинамических углов, содержащий цилиндрический насадок, расположенный пернендикулярно невозмущенному набегающему потоку с двумя рядами приемных отверстий, разогреваемые электрическим током полупроводни-ковые терморезисторы, включенные в измерительную схему, отличающийся тем, что, с целью повышения надежности в работе и уменьшения пульсаций давления в приемных отверстиях, в пневматическую схему датчика введена проточная камера, соединенная с приемными отверстиями каналами.
2. Пневмоэлектрический датчик по п. 1, отличающийся тем, что, с целью повышения точности измерения, в каналах иа входе в
камеру установлены капсулы термоанемометрических преобразователей, состоящие из бусинкового терморезистора, сопла и изоляционной втулки.
3. Пневмоэлектрический датчик по п. 1, отличающийся тем, что, с целью расширения диапазона измеряемых аэродинамических углов, введена следящая система, управляемая по сигналу рассогласования с выхода
измерительной схемы датчика, обеспечивающая такое положение насадка относительно воздушного потока, при котором достигается равенство давлений в приемных отверстиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК АЭРОДИНАМИЧЕСКИХ УГЛОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1973 |
|
SU466786A1 |
| ПНЕВМОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ АЭРОДИНАМИЧЕСКИХ УГЛОВ | 1973 |
|
SU466727A2 |
| ВИХРЕВОЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2556760C1 |
| ВИХРЕВОЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2012 |
|
RU2506596C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| ПНЕВМОЭЛЕКТРИЧЕСКИЙ ДАТЧИК АЭРОДИНАМИЧЕСКИХ УГЛОВ | 1971 |
|
SU392752A1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| Устройство для измерения перемещения кромки ленточного материала | 1977 |
|
SU682757A1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
«
