Известна система безопасного двуручного управления пневмоцилиндром , содержащая двухпозиционный нятилинейный распределитель с пневматическим управлением и пульт ручного унравления распределителем, состоящий из двух последовательно соединенных двухнозиционных золотников.
Цель изобретения - удержание цилиндра в рабочем положении нри снятии рук с кнопок пульта унравления, а также последующего автоматического или ручного освобождения зажима.
Для этого система снабжена клапаном с логической функцией «ИЛИ, выход которого соединен с управляющей полостью больщего диаметра распределителя, а один вход соединен с выходом пульта управления, а также клапаном путевого выключения с логической функцией «ДА выход которого соединен со вторым входом кланана «ИЛИ, и клапаном освобождения с функцией «ДА, соединенным последовательно с клапаном путевого выключения.
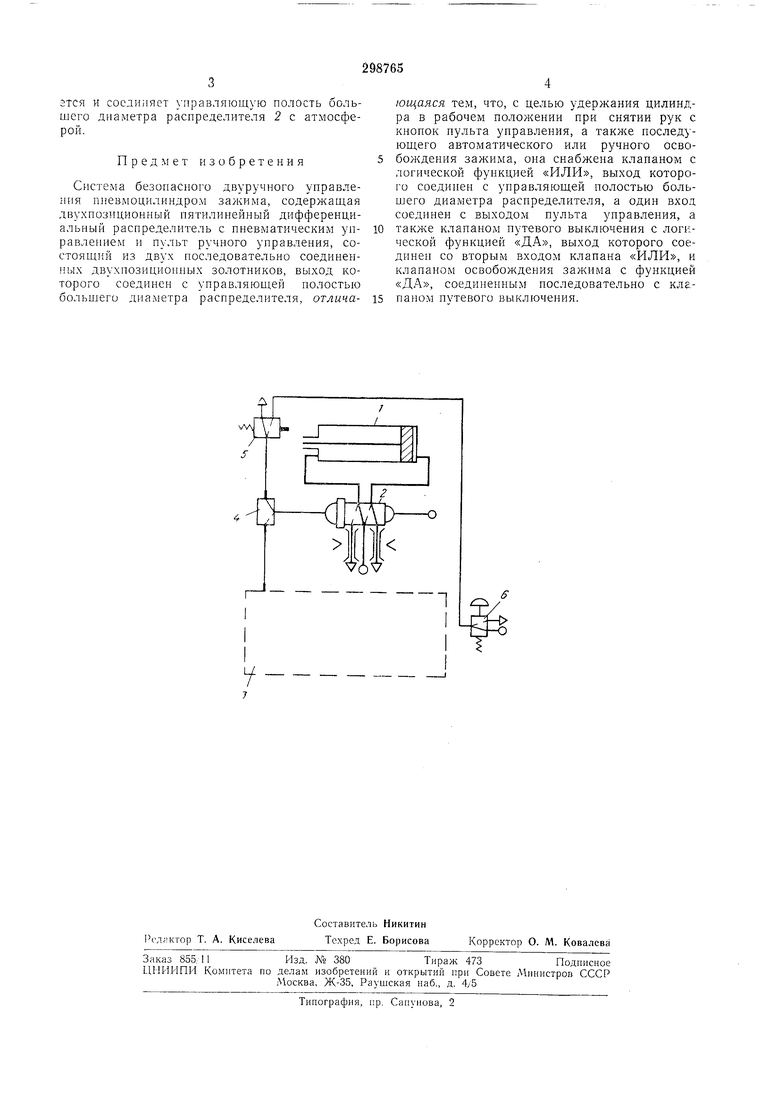
На чертеже показана схема предлагаемой Системы.
Полости пневмоцилиндра / зажима соединены с двухпозиционным пятилинейным дифференциальным распределителем 2. Управляющая полость больщего диаметра соединена с выходом пульта 3 ручного управления через клапан 4 с логической функцией «ИЛИ. Пульт ручного управления содержит два последовательно соединенных двухпозиционных распределителя (на чертеже не показаны). Второй вход клапана 4 соединен с выходом клапана 5 путевого выключения. Последовательно с клапаном 5 соединен клапан 6 автоматнческого или ручного освобождения зажима.
Система работает следующим образом.
Команда на зажим изделия подается операторо.м путем нажатия на две кнопки пульта 3, с выхода которого сжатый воздух поступает в управляющую полость больщего
диаметра распределителя 2 через логический клапан 4. Оператор не может снять руки с кнопок пульта до тех пор, пока не закончится ход цилиндра 1, так как при этом произойдет возврат распределителя в исходное
положение.
При завершении цилиндром рабочего хода клапан 5 соединяет второй вход клапана 4 с линией питания через клапан 6, благодаря
чему при снятии рук с кнопок пульта 3 не нроисходит возврата распределителя 2 в исходное .положение, и цилиндр находится в рабочем положении до тех пор, пока не будет подана команда на освобождение зажизтся и соединяет управляющую полость большего диаметра распределителя 2 с атмосферой.
Предмет изобретения
Система безопасного двуручного управления пиевмоцилиндром зажима, содержащая двухпозиционный пятилинейиый дифференциальный распределитель с пневматическим управлением и пульт ручного управления, состоящий из двух последовательно соединенных двухнозиционных золотников, выход которого соединен с управляющей полостью больщего диаметра распределителя, отличающаяся тем, что, с целью удержания цилиндра в рабочем положении при снятии рук с кнопок пульта управления, а также последующего автоматического или ручного освобождения зажима, она снабжена клапаном с логической функцией «ИЛИ, выход которого соединен с управляющей полостью больщего диаметра распределителя, а один вход соединен с выходом пульта управления, а
клапаном путевого выключения с логической функцией «ДА, выход которого соединен со вторым входом клапана «ИЛИ, и клапаном освобождения зажима с функцией «ДА, соединенным последовательно с клгпаном путевого выключения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕЗОПАСНОГО ДВУРУЧНОГО УПРАВЛЕНИЯ ПНЕВМОЦИЛИНДРОМ ЗАЖИМА | 1971 |
|
SU299679A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМПРЕССОМ | 1971 |
|
SU418351A1 |
| Система безопасного управления пневмоцилиндром | 1974 |
|
SU542032A1 |
| УСТАНОВКА ДЛЯ ПРИНУДИТЕЛЬНОГО СПУСКА ТРУБ В СКВАЖИНУ ПОД ДАВЛЕНИЕМ | 1995 |
|
RU2098594C1 |
| СПУТНИК ДЛЯ АВТОМАТИЧЕСКИХ ЛИНИЙ | 1970 |
|
SU269782A1 |
| ПНЕВМОЭЛЕКТРИЧЕСКОЬ УСТРОЙСТВО УПРАВЛЕНИЯ КОВОЧНЫМ МОЛОТОМ | 1968 |
|
SU208422A1 |
| Устройство для управления подачей давления в гидроцилиндры секций механизированных крепей | 1986 |
|
SU1597114A3 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫНОСНЫМИ ОПОРАМИФу^'.Д 'i.-i.''--'—-• | 1971 |
|
SU422681A1 |
| УПРАВЛЯЕМЫЙ КЛАПАН | 1972 |
|
SU422906A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТРУГОВЫМ АГРЕГАТОМ ДЛЯ ЛАВЫ С КРЕПЕЖНЫМИ СТОЙКАМИ | 1991 |
|
RU2069270C1 |
-о-ста
