1
Изобретение относится к системам управления выносными опорами самоходных машин, нанример стреловых кранов.
Известна система управления выносными опорами, преимущественно крана, содержащая насос, создающий рабочее давление жидкости, поступающей через трубопроводы и управляемые распределители к гидроцилиндрам.
При такой системе управления выносными опорами платформа краиа выравнивается машинистом с помощью распределителей вручную. При этом горизонтальность платформы определяется приспособлением, состоящим из отвеса и шкалы, отградуированной в угловых единицах, или с помощью пузырькового уровня, или «па глаз. Все это не позволяет с необходимой точностью определять угол наклона платформы, производить правильную начальную установку и поддерживать ее при рабочих операциях. В результате краны часто работают с углами наклона платформы более допустимых, следствием этого являются аварии кранов при подъемах предельных грузов. Особенно ответственной и трудоемкой является установка дополнительных опор тяжелых самоходных кранов с длинными стрелами и кранов с башенно-стреловым рабочим оборудованием при допустимом угле наклона платформы пе более 1-1,5°.
Для повышения безопасности работ и увеличения нроизводительности труда система выполнена в виде магистральных линий трубопроводов, одна из которы - параллельного питания гидроцплиндров с включенным в напорную магистраль датчиком давлення, вторая - нопарного пптанпя гидроцилиндра посредством синхронизаторов движения, подключенных разветыляющимся трубопроводом к унравляющему распределителю, а выходы синхронизаторов подключены попарно разветвляющимися трубопроводами через обратные клапаны к снмметричио расположепным унравляемым гидроцилиндрам.
С целью обеспечепия последовательности операций при устаповке краиа на выносные опоры управляет ые распределители могут быть сообшены с блоком управления и связаны с креномером, размещенным на шасси крана.
Для обеспечения выравнивания платформы крана при «проседапии одной выносной опоры могут быть устаповлены дополнительные датчики мипил ального давления, управляющие распределителями диагонально располо}кеиных выносных опор.
С целью надежного освобождення баллонов крана от нагрузки в блоке управлепия целесообразпо установпть элементы времени, полключающис попарно сипхропмое выдвижение гидроцилиндров.
С целью ирскращецня опускания выносных опор крана при сонрикосновении с грунтом датчик давления .целесообразно включить последовательно с унравляел1ым распределителем.
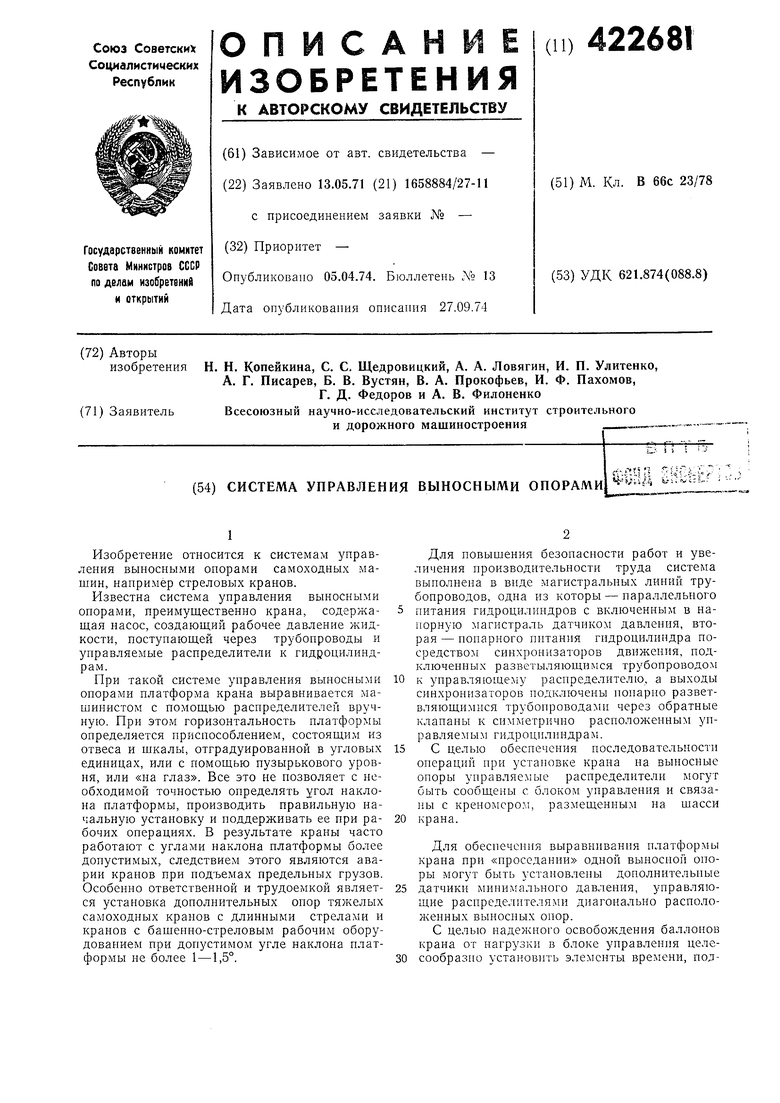
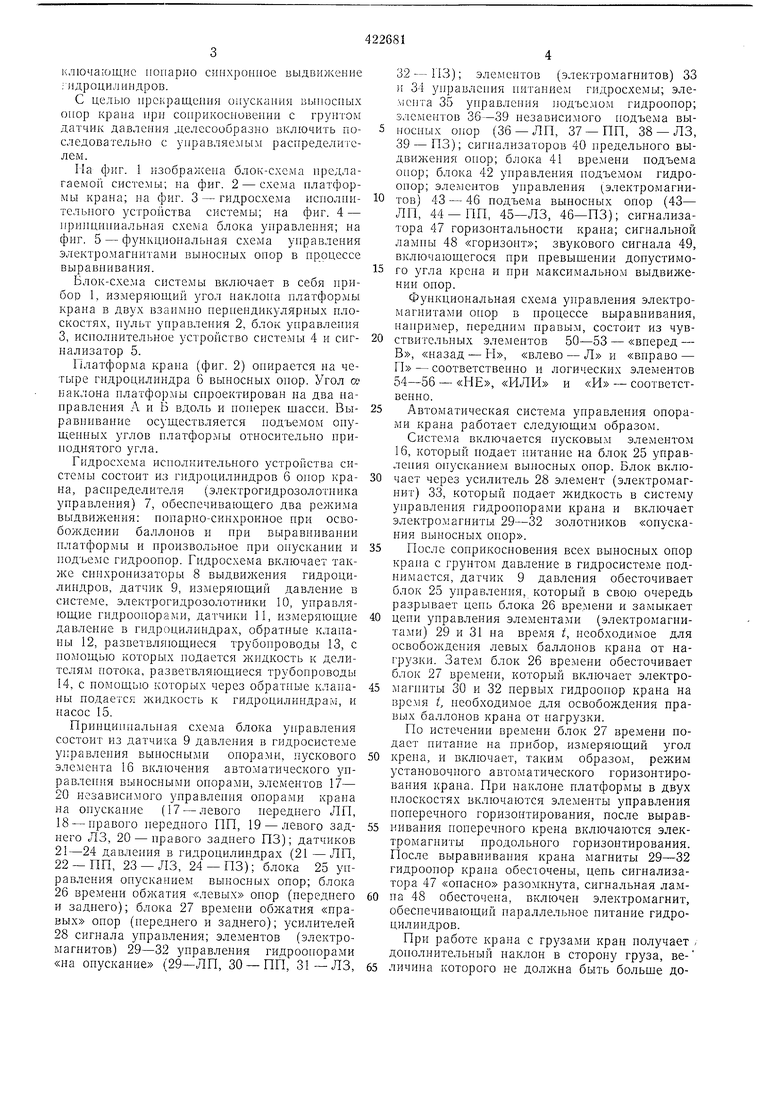
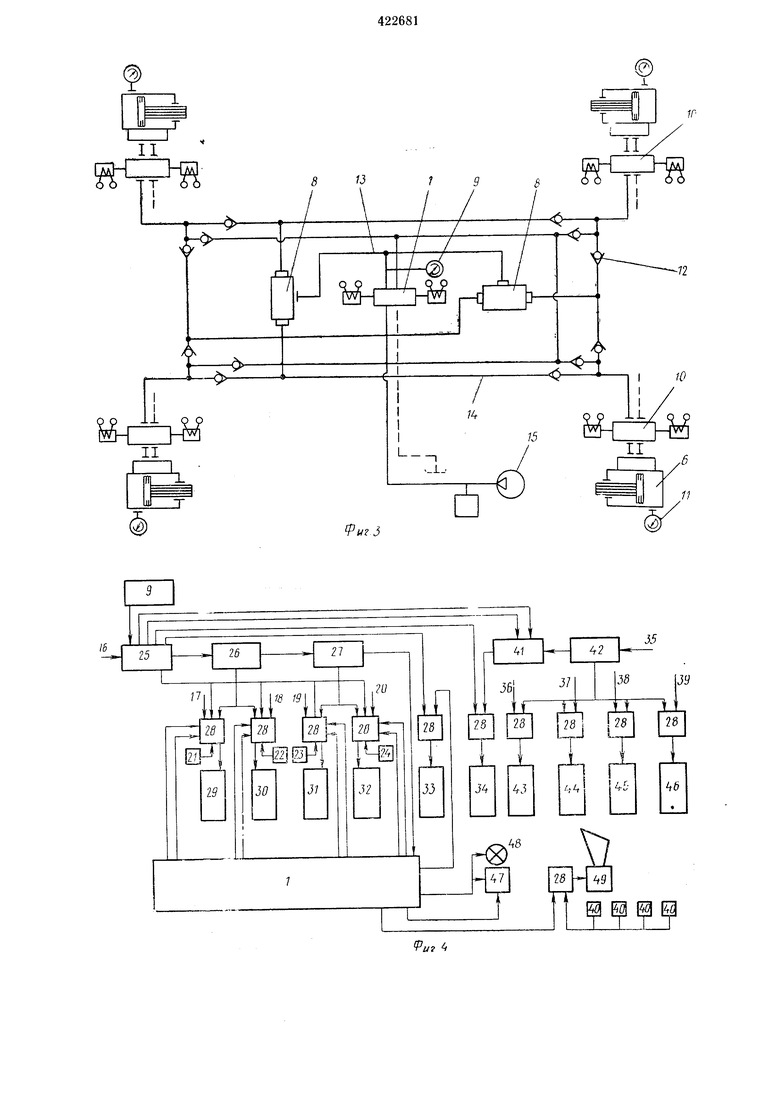
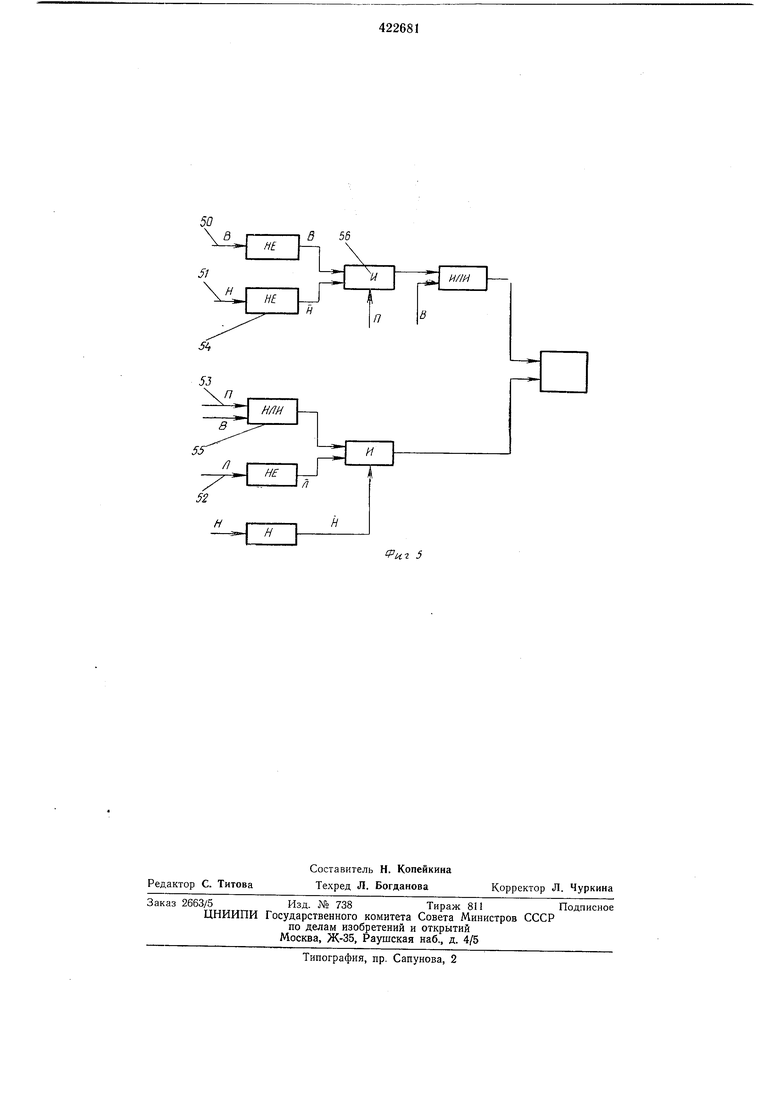
На фиг. 1 изображена блок-схема предлаracMoii системы; на фиг. 2 - схема платформы крана; на фиг. 3 - гидросхема исполнительного устройства системы; на фиг. 4 - нрннцнниальная схема блока управления; на фнг. 5 - функциональная схема управления электромагнитами выносных онор в процессе выравнивания.
Блок-схема системы включает в себя прибор 1, измеряющий угол наклона платформы крана в двух взаимно нерпендикулярных плоскостях, пульт унравлепия 2, блок управления 3, исполнительное устройство системы 4 и сигнализатор 5.
Платформа краиа (фиг. 2) оиирается на четыре гидроцилиндра 6 выносных онор. Угол ет наклона илатфор: 1ы спроектирован на два направления А и Б вдоль и нонерек шасси. Выравнивание осуществляется нодъемом онущенных углов платформы относительно ириподнятого угла.
Гидросхема исполнительного устройства системы состоит из гидроцилиндров 6 опор крана, распределителя (электрогидрозолотника управления) 7, обеспечивающего два режи.ма выдвижения; попарно-синхронное при освобождении баллонов и при выравнивании платформы и ироизвольное при онускании и подъеме гидроонор. Гидросхема включает также снихронизаторы 8 выдвижения гидроцилиндров, датчик 9, измеряющий давление в системе, электрогидрозолотники 10, управляющие гидроопорами, датчики 11, измеряющие давление в гидроцилиндрах, обратные клапаны 12, разветвляющиеся трубопроводы 13, с помощью которых нодается жидкость к делителям потока, разветвляющиеся трубонроводы 14, с помощью которых через обратные клапаны подается жидкость к гидроцилиндрам, и насос 15.
Приициниальная схема блока управления состоит из датчика 9 давления в гидросистеме управления выносны.дш опорами, пускового элемента 16 включения автоматического уцравлепия выносными опорами, элементов 17- 20 независимого управления опорами краиа на онускание (17 - левого переднего ЛП, 18 - правого передного ПП, 19 - левого заднего ЛЗ, 20 - правого заднего ПЗ); датчиков 21-24 давления в гидроцилиндрах (21 -ЛП, 22 - ПП, 23 - ЛЗ, 24 - ПЗ); блока 25 управления онусканием выносных опор; блока 26 времени обжатия «левых опор (переднего и заднего); блока 27 времени обжатия «цравых опор (нереднего и заднего); усилителей 28 сигнала управления; элементов (электромагнитов) 29-32 управления гидрооиорами «на опускание (29-ЛП, 30 -ПП, 31-ЛЗ,
32 - 113); элементов (электромагнитов) 33 л 34 унравлеиия питанием гидросхемы; элемента 35 управления нодъе.мом гидроонор; элементов 36-39 пезависи.мого нодъема выносных онор (36 -ЛП, , 38 - ЛЗ, 39 - ПЗ); сигнализаторов 40 предельного выдвижения онор; блока 41 времени подъема опор; блока 42 управления подъемом гидроонор; элементов управления (электромагнитов) 43 - 46 подъема выносных опор (43- ЛП, 44 -ПП, 45-ЛЗ, 46-ПЗ); сигнализатора 47 горизонтальности крана; сигнальной лампы 48 «горизонт ; звукового сигнала 49, включающегося при превыщении донустимого угла крена и при максимальном выдвижении онор.
Функциональная схе.ма управления электромагнитами опор в процессе выравнивания, например, передним правым, состоит из чувствительных элементов 50-53 - «вперед - В, «назад - П, «влево - Л и «вправо - II - соответственно и логических элементов 54-56 - «НЕ, «ИЛИ и «И - соответственно.
Автоматическая система унравления опорами крана работает следующим образом.
Система включается пусковым элементом 16, который подает питание на блок 25 управления опусканием выносных опор. Блок включает через усилитель 28 элемент (электромагнит) 33, который подает жидкость в систему унравления гидроопорами крана и включает электромагниты 29-32 золотников «опускания выносных опор.
После соприкосновения всех выносных опор крапа с грунтом давление в гидросистеме поднимается, датчик 9 давления обесточивает блок 25 унравления, который в свою очередь разрывает цепь блока 26 вре.мени и замыкает
цени управления элементами (электромагнитами) 29 и 31 на время t, необходимое для освобождения левых баллонов крана от нагрузки. Затем блок 26 времени обесточивает блок 27 времени, который включает электромагниты 30 и 32 первых гидроопор крана на врелш /, необходимое для освобождения правых баллонов крана от нагрузки.
По истечении времени блок 27 времени подает питание на прибор, измеряющий угол
крена, и включает, таким образом, режим установочного автоматического горизонтировапия крана. При наклоне платформы в двух плоскостях включаются элементы унравления ноперечного горизонтирования, после выравнивания поперечного крена включаются электромагниты продольного горизонтирования. После выравнивания крана магниты 29-32 гидроонор крана обесточены, цепь сигнализатора 47 «опасно разомкнута, сигнальная лампа 48 обесточена, включен электромагнит, обеспечивающий параллельное питание гидроцилиндров.
При работе крана с грузами кран получает , дополнительный наклон в сторону груза, величина которого не должна быть больще допустимого рабочего угла. При наклоне крана на угол более допустимого, при наличии усилия (давления на всех четырех онорах). горизонтирование производится вышеонисанпым способом в поперечной и продольной плоскостях. При просадке одной оноры крана на диагонально противоположной опоре усилие уменьшается, срабатывает один из датчиков давления 21-24 и включает подачу жидкости в диагонально противоположную датчику гидроопору. При наклоне платформы крана на угол свыше допустимого или при предельной величине выдвижения гидроопор включается звуковой сигнал. Сигнал прекращает звучать только при установке крана в горизонтальное положение или при устранении предельной величины выдвиж;ения гидроопор.
Независимое управление гидроопорами на «онускание осуществляется элементами независимого управления 17-20 и на «подъем: - элементами управления 36-39. Гидроопоры включаются на подъем элементов 35 через блок 41 времени, задающий время, необходимое па опускание выносных опор, и через блок 42 упраВьПения.
Предмет изобретения
1. Система управления выносными опорами, преимущественно крана, содержащая насос, создающий рабочее давление жидкости, поступающей через трубонроводы и управляемые распределители к гидроцилиндрам, отличающаяся тем, что, с целью повышения безопасности работ и увеличения производительности труда, она выполнена в виде
aгиcтpaль;гз x лпний трубопроводов, одна из которых - параллельного питания гидроцилиндроп с включенным в напорную магистраль датчиком давления, вторая - попарного 5 питания гпдронплпндров посредством синхронизаторов л.ижения. подключенных разветвляющил ся трубопроводом к управляющему распределителю, а выходы синхронизаторов нодключены нопарно разветвляющпмпся тру0 бопроводалн через обратные клапаны к симметрично расположенным унравляемым гидроцилиндрам.
2.CncieAia по н. 1, отличающаяся тем, что. с обеспечения носледователь5 пости операцпй при установке крана на выносные опоры, правляемые распределители сообпюпы с блоком управления н связаны с креномерол. размещенным нл гнассн крана.
3.Систелга по пп. 1 и 2, отличающаяся 0 тем. что. с целью обеспечентш выравнивания
платформы крана нри «проееданпи одной выносной опоры, установлен дополнительные датчики нпимг;льного давления, управляюп.ие распоеделптелялп- диагонально располо5 женпых выпоспых опор.
4.Систе ла по п. 2. отличающаяся тем, что, с целью падежного освобождения баллонов крапа от нагрузки, в блоке унравления
донолннтелыю установлены элементы нн, нодклю-;ающпе попарно синхронное выдвижснне гидроцнлиндров.
5.Система по п. 1. отлнчающаяся тем, что, с целью прекращення опускания выносных опор крапа при соприкосновении с землей, датчик давлоппя включен последовательно с угфавляемым распределителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УДЕРЖАНИЯ В ГОРИЗОНТАЛЬНОМ ПОЛОЖЕНИИ ПЛАТФОРМЫ КРАНА | 1967 |
|
SU191084A1 |
| КРАН СТРЕЛОВОЙ САМОХОДНЫЙ | 2015 |
|
RU2599741C2 |
| УСТРОЙСТВО ПРИВОДА РЕГУЛЯТОРА СКОРОСТИ ДЛЯ ГИДРАВЛИЧЕСКИХ МЕХАНИЗМОВ | 1973 |
|
SU404072A1 |
| ОТКИДНАЯ ОПОРАВ1^г:Г'' '"'• '<''~\О! J \;; L/ i-v- ^w--; ч..' -- • I •'.. 1•Г(Г:-;-1Г; ' . ,•:• •• • . Lti i fiu" г .. ;,ii,-. . Л | 1972 |
|
SU348488A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ'.л | 1972 |
|
SU348744A1 |
| Устройство для стабилизации горизонтального положения платформы строительной машины | 1973 |
|
SU489713A1 |
| Г. И. Носова | 1972 |
|
SU353002A1 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ СТРЕЛОВОГО КРАНА ПО СИГНАЛАМ ДАТЧИКОВ ОПОР И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245294C2 |
| Система управления выносными опорами платформы | 1982 |
|
SU1039863A1 |
| СИСТЕМА ОЧИСТКИ ВОЗДУХАI ^^^БЛ^^-^О':.^~~^r,,^cy:Mf.-:i | 1971 |
|
SU322513A1 |
Фиг. 2
В 58
