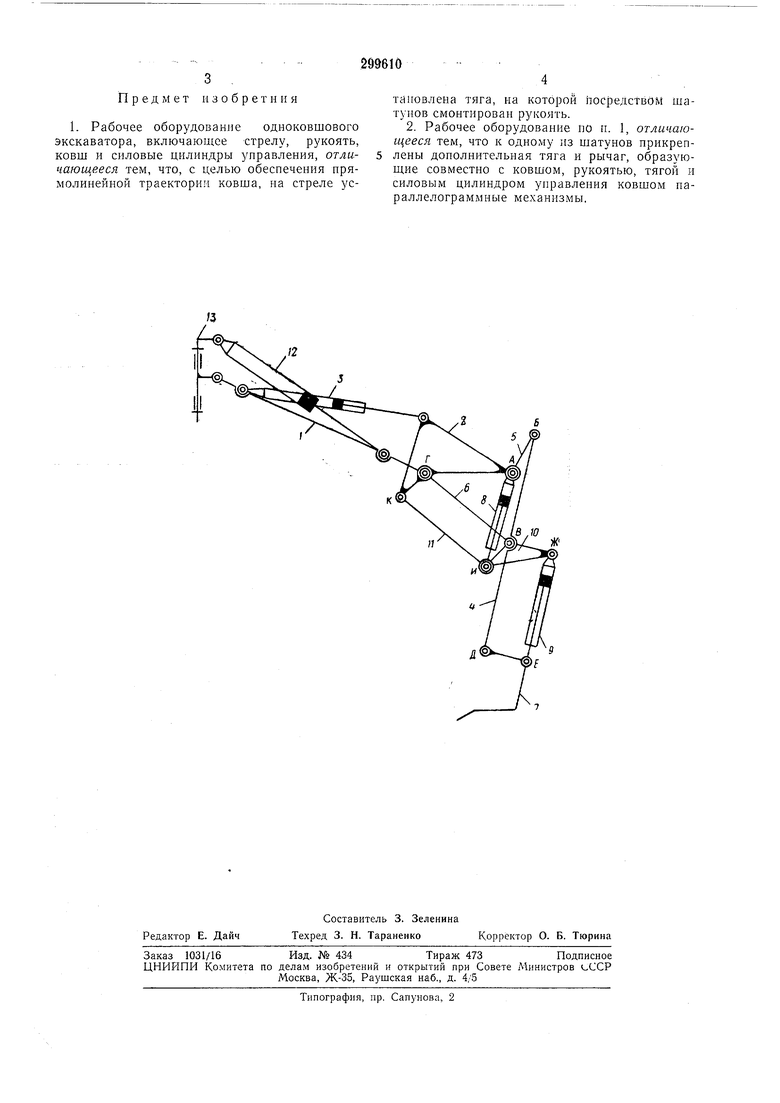
Изобретение относится к области землеройного машиностроения. Известно рабочее оборудование одноковшового экскаватора, включающее стрелу, рукоять, ковш и силовые цилиндры управления. Однако при разработке грунта но заданной прямолинейной траектории неремещается не все рабочее оборудование, а только одна из его точек (например режущая кромка ножа), что влечет за собой изменение угла резания. iB описываемом рабочем оборудовании для обеспечения прямолинейной траектории ковша прн сохранении постоянного угла на .стреле установлена тяга, на которой носредством шатунов смонтирована рукоять. При этом к одному из шатунов прикреплены дополнительные тяги и рычаг, образующие совместно с ковшом, рукоятью, тягой и силовым цилиндром управления ковшом параллелограммные механизмы. Па чертеже показано описываемое рабочее оборудование, кинематическая схема. Рабочее оборудование содержит стрелу 1, тягу 2, силовой цилиндр 3 унравления тягой, рукоять 4, шатуны 5 к 6, ковш 7, силовой цилиндр 8 спрямленной траектории копания, силовой цилиндр 9 ковша, рычаг 10, дополнительную тягу 11, силовой цилиндр 12 стрелы и новоротную колонку 13 экскаватора. На стреле / экскаватора установлена тяга, которая может поворачиваться вокруг шарнира Г при -помощи цилиндра 3. К тяге 2 подвешена рукоять 4 на двух щатунах 5 и б в точках (шарнирах) Б и В. Механизм, состоящий из звеньев 4, 5 и , подвешенных в точках (шарнирах) А и Г, представляет собой лямдообразный спрямляюший механизм, точка Д которого на определенном участке движется по прямолинейной траектории параллельно нрямой, проведенной через точки Л и Г. Так как рукоять 4 меняет угол наклона относительно траектории движения точки Д, то для получения постоянного угла резания на прямолинейном участке введено два взаимосвязанных параллелограммных механизма КИ-ДВ, КГ-НВ и ЖВ-ДЕ, ВД-ЖЕ при копании по прямой, замыкающим звеном которых является ковш 7. Цилиндр спрямленной траектории копания включен между точками (шариками) А и И. Силовой цилиндр 9 ковша является одновременно звеном параллелограмма. Копание по прямолинейной траектории осуществляется цилиндром 8 при полностью втянутом штоке цилиндра 9 (т. е., когда ВД-ЖЕ) и запертом днлиндре 3. Предмет изобрети и я 1. Рабочее оборудование одноковшового стрелу, рукоять. экскаватора, включающее ковш и силовые цилиндры управления, отличающееся тем, что, с целью обеспечения прямолинейной траектории ковша, на стреле устаковлена тяга, на которой посредством шатунов смонтирован рукоять. 2. Рабочее оборудование по п. 1, отличающееся тем, что к одному из шатунов прикреплены доиолнительная тяга и рычаг, образующие совместно с ковшом, рукоятью, тягой и силовым цилиндром уиравления ковшом параллелограмм и ые механизмы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование гидравлического одноковщового экскаватора | 1975 |
|
SU653345A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКО) | 1973 |
|
SU377476A1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ К ОДНОКОВШОВОМУ | 1968 |
|
SU210755A1 |
| Рабочее оборудование экскаватора | 1988 |
|
SU1548349A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1973 |
|
SU394506A1 |
| Рабочее оборудование экскаватора обратная лопата | 1977 |
|
SU751912A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1970 |
|
SU279462A1 |
| Рабочее оборудование одноковшового экскаватора | 1983 |
|
SU1201420A1 |