1
Изобретение относится s гироскопичному приборостроению и может быть использовано в тех случаях, когда требуется получить за время разгона гиромотора малую амплиту ду колебаний чувствительного элемента около положения меридиана, например, в наземных торсионных гирокомпасах.
Известен наземный торснонный -гирокомпас с ускоренным приведением чувствитель ного элемента в плоскость меридиана, например маркшейдерский торсионный гирокомпас, содержащий чувствительный элемент (ЧЭ) с торсионным подвесом, датчик углового положения 43 относительно корпуса гирокомпаса, программный эпектропривод 1ютора и азимутальную следяющую систему с сервоприводом и усилителем 1 .
Однако в таком гирокомпасе степень уменьшения амплитуды колебаний ЧЭ, установившихся после окончания разгона ротора, ограничена. В частности, при начальных отклонениях ЧЭ в азимуте +20 от меридиана (такие начальные отклонения главной оси ги{юкомпаса допускаются при работе с маркшейдерскими гирокомпасами) минимальн с
значение амплитуды установившихся прецессионных колебаний на широте 60 составляет 1 . С рйничение минимальной величины амплитуды колебаний, установившикся после окончания разгона ротора, объясняется следующим образом.
Приведение ЧЭ во время р азгона осуществляется за счет инерционного момента М , возникающего при разгоне ротора
Мй ji
где 3 - момент инерции ротора,
Ь - угол подъема главной гирокомпаса над плоскостью горизонта.
Величина этого момента ограничена, так как ограничены величиныft и ./) . Поэтому за счет использования момента (Л не удается уменьшить амплитуду ниже определенного предела.
Цель изобретения - повышение точности ускоренного приведения гирокомпаса, осуществляемого за время разгона ротора,
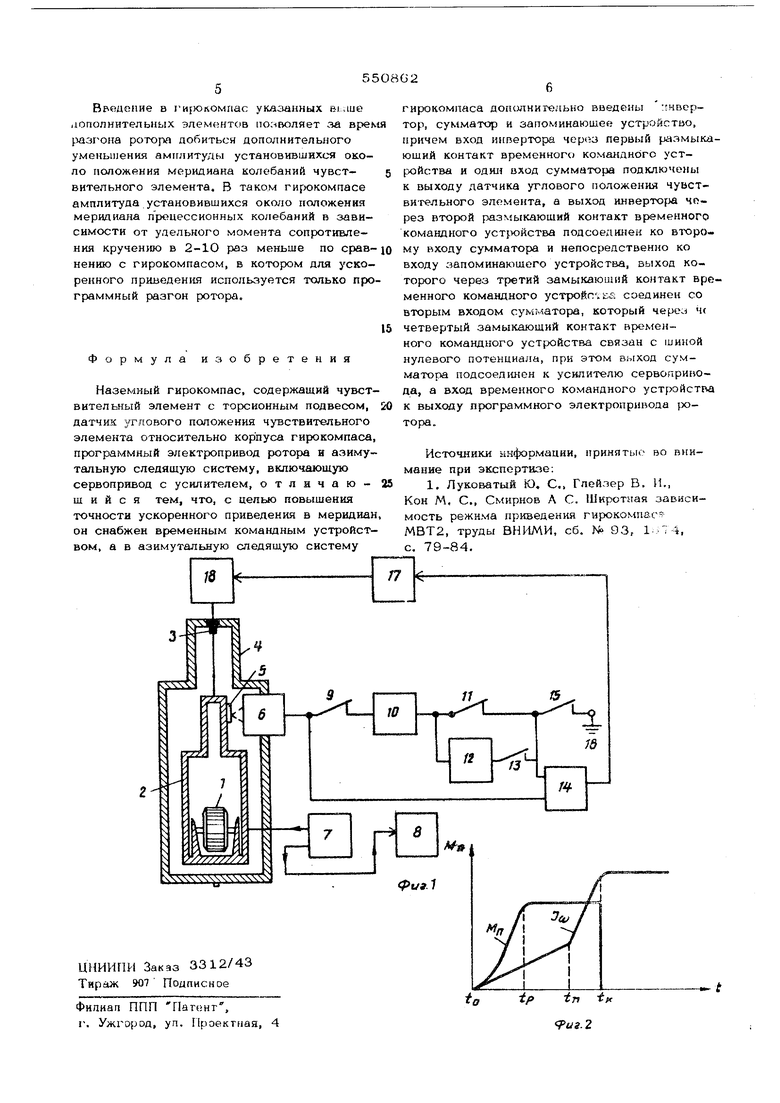
Для этого предлагаемый гирокомпас рнабжен временным командным устрсйсгвом, р в азимутальную следящую систему дополнительно введены инверггор, сумматор и запоьвшающее устройство, причем вход инвертора через первый рюзмыкаюший контакт временного командного устройства и один вход сумматора подключены к выходу датчика углового положения чувствительного элемента, а выход инвертора через второй размыкающий контакт временного командного устройства подсоединен ко второму входу сумматора и непосредственно ко входу запоминаюшего устройства, выход которого чере третий замыкающий контакт временного коJ aнднoгo устройства гоединен со вторым вх дом суммато{1а, связанным с шиной нулевого потенциала через четвертый замыкаюший контакт временного командного устройства, при этом выход сумматора подсоединен к усилителю сервопривода,, а вход време ного командного устройства к выходу програ много электропривода ротора. На фиг. 1 приведена блок-схема наземного гирюкомпаса с ускоренным приведением чувствительного элемента в меридиан во вре мя разгона ротора гиродвигателя;. на фиг. 2 пр едставлен закон , изменения кинетического момента гирокомпаса D и закон изменения момента сопротивления подвеса М., во время разгона рютори. Схема включает гирсдвигатель 1, чувствительный элемент 2, торсион 3, корпус 4, зеркало 5, оптический датчик 6 углового положения чувствительного элемента, программный электропривод 7 ротора, врюменное командное устройство 8, первый: размыкаюший контакт 9 временнсмго командного устройства, инвертор 10, второй размыкающий контакт 11 временного командного устройст ва, запоминающее устройство 12, третий замыкающий контакт 13 временного командного устройства, сумматор 14, четвертый з мыкающий контакт 15 временного командного устройства, шина 16 нулевого положения усилитель 17 сервопривода, сервопривод 18 В этом гирокомпасе используется момент М „ сопрютивления кручению упругих сип то сионного подвеса во время осуществленного по заданной прогрхамме р азгона ротор (см. фиг, 2). Момент Му изменяется по закону fC-(,-(t))при С-{«Ц,-с(у|при при t t j С - удельный момент сопротивления кручению подвеса; сСц - начальное отклонение ЧЭ; eClt)-текущее значение }тловпго отклонения ЧЭ от меридиана; tp - время закручивания подвеса; t - вр)емя окончания разгона гиро- дпигатгля. 1 ирэком11ас работай г смецуклцнм DUpjajM. При вкпючонии программного эпекгропривэа7 начинает раз Э11ягься рогэр 1, и чувствительный элемент 2, гтодп1 111енный на торюионе 3, начинает двкгат1х::я относительно корпуса 4 по направлению к мортиану вокруг вертикальной оси. При этом перемешается световой луч, отраженный от зеркала 5, и с оптического датчика 6 углового положения чувствительного элЕмента возрастает сигнал рассогласования, поступающий через замкнутый контакт 9 временного командного устройства на вход инвертора 10 и одновременно на один вход сумматора 14. С выхода инвертор а инвертированный сигнал через замкнутый контакт 11 временного командного устрюйцтва поступает на второй вход сумматоре 14. На выходе сумматор а суммарный сигнал р)авен нулю, поэтому отсутствует сигнал на входе усилителя 17 сервопривода и сервопривод 18 не разворачивает верхний зажим торсиона 3. В результате торсион закручивается и создает момент сопротивления. Далее через заранее рассчитанный промежуток времени по первой команде от временного командного устройства 8 контакты 9 и 11 размыкаются, а контакт 13 замыкается. При этом сигнал с оптического датчика 6 углового положения поступает только на один вход сумматора 14, а на второй вход сумматора поступает сигнал с запоминающего устрюйства 12, подключенного к выходу инвертора 1О. Этот сигнал соответствует углу рассогласования между чувствительным элементом 2 и корпусом 4 в момент подачи первой команды от временного командного устройства 8. Появивщийся на выходе сумматора 14 сигнал поступает на вход усилителя 17 сервопри- , вода и сервопривод 18 р)азворачивает верх- ний зажим торсиона 3. Таким образом, после первой команды от врюменного командного устрюйства 8 чувствительнуй элемент цвигается с постоянным углом закручивания торсиона 3. В момент окончания разгона гирюдвигател 1, осуществляемого от программного электропривода 7, временное командное устройство 8 вырабатывает команду, по которой контакт 15 замыкается и один вход сумматор)а подсоединяется к шине 16 нулевого потенциала. В результате этого на выходе сумматора 14 сигнал резко возрастает и серво привод 18 разворачивает верхний зажим торсиона 3, уменьшая угол закручивания до нулевого значения. Таким образом, по окончании разгона прюисходят малые колебания чувствительного элемента, а угол закручивания торсиона сохряняотся равным нули..
| название | год | авторы | номер документа |
|---|---|---|---|
| Наземный гирокомпас | 1976 |
|
SU606414A1 |
| Способ приведения чувствительного элемента торсионного гирокомпаса в плоскость меридиана | 1976 |
|
SU571700A1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| Угломерное устройство для наземного гирокомпаса | 1976 |
|
SU579544A2 |
| Трехстепенный маятниковый гирокомпас | 1991 |
|
SU1809306A1 |
| Автоматический наземный гирокомпас | 1979 |
|
SU808847A1 |
| Торсионный подвес чувствительного элемента наземного гирокомпаса | 1980 |
|
SU862668A1 |
| ГИРОАЗИМУТКОМПАС С АВТОМАТИЧЕСКОЙ ВЫРАБОТКОЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2470260C1 |
| Гирокомпас | 1981 |
|
SU1559844A1 |
