Известны силовые головки с размещенным в ее корпусе шпинделем, получающим вращение от привода главного движения, и кинематической цепью, сообщающей головке движения рабочих подач.
Предлагаемая силовая головка отличается от известных тем, что в ней предусмотрена защита режущего инструмента от перегрузок в процессе обработки. Для этого механизм выполнен в виде размещенного внутри шпинделя торсионного валика и элементов, взаимодействующих с индукционными датчиками и закрепленных внутри корпуса в передней части шпинделя и на приводном шкиве вне корпуса.
Для повышения быстродействия при получении двух рабочих подач головка снабжена механизмом автоматического переключения, выполненным в виде пневмоцилиндра, воздействующего через рычажную систему на соединительную муфту цепи подач.
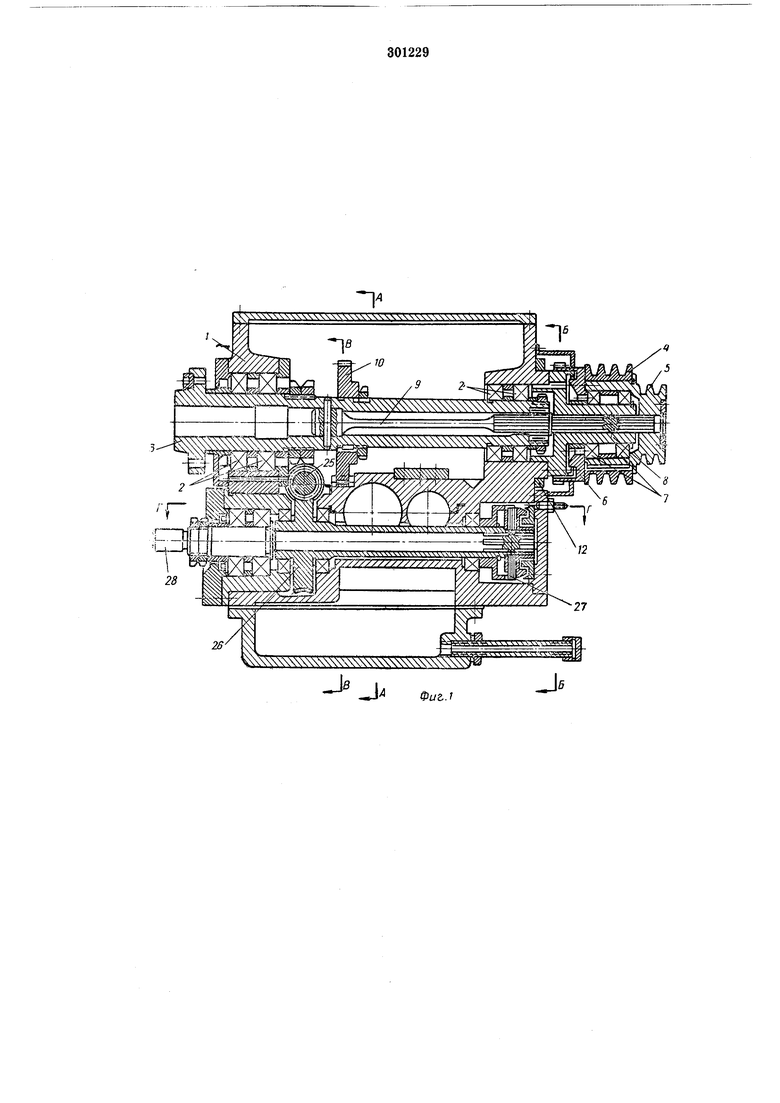
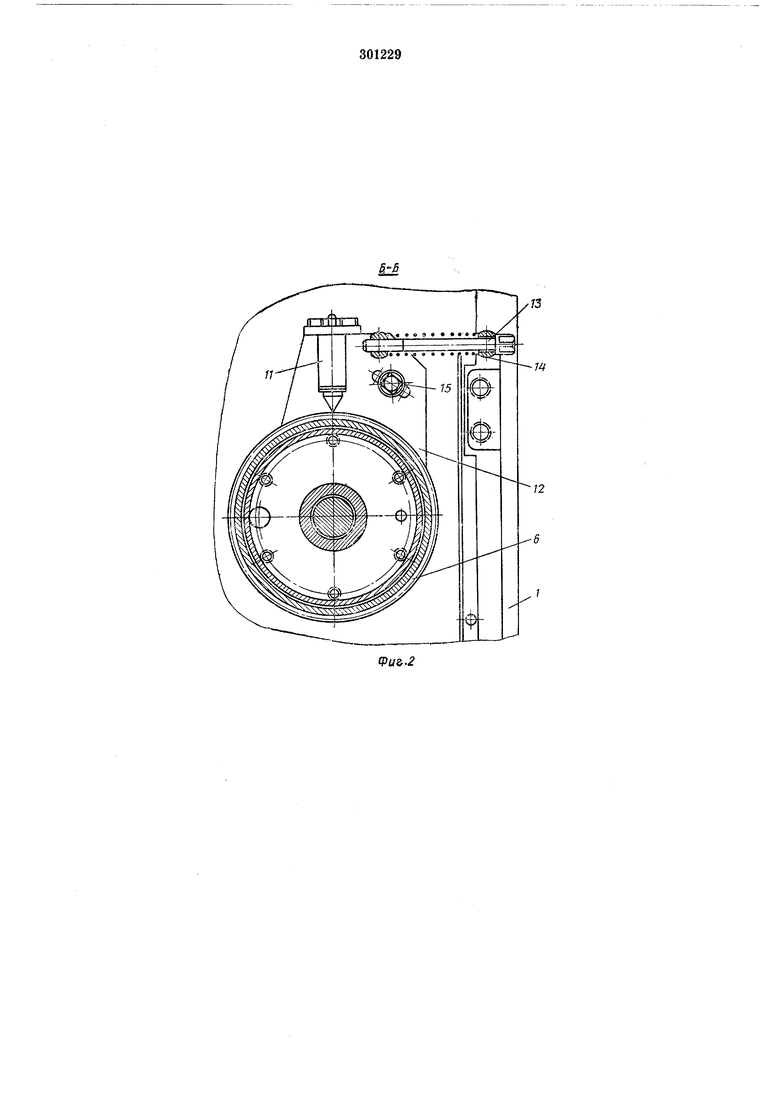
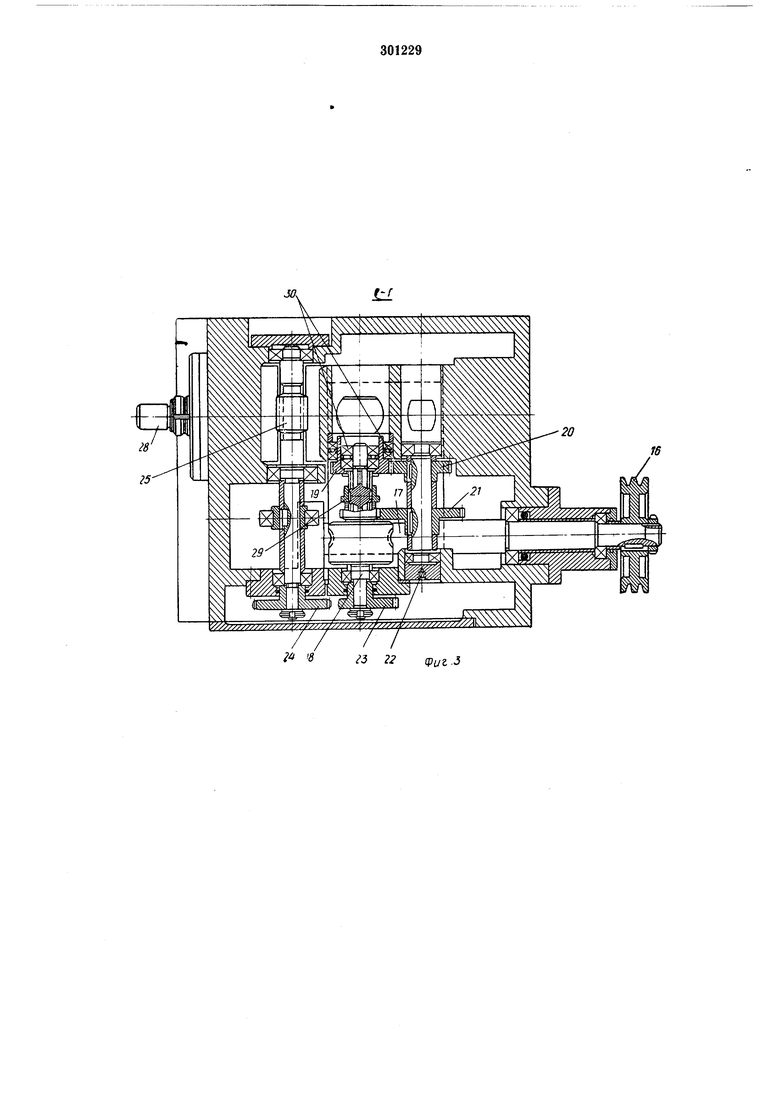
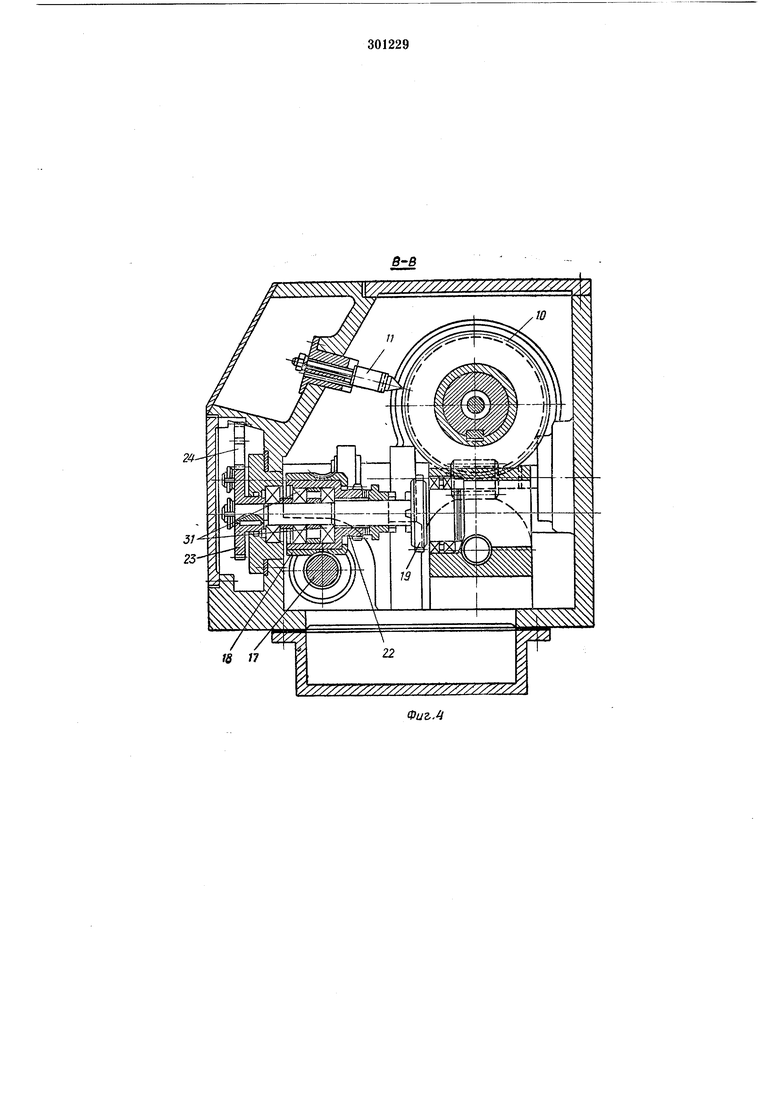
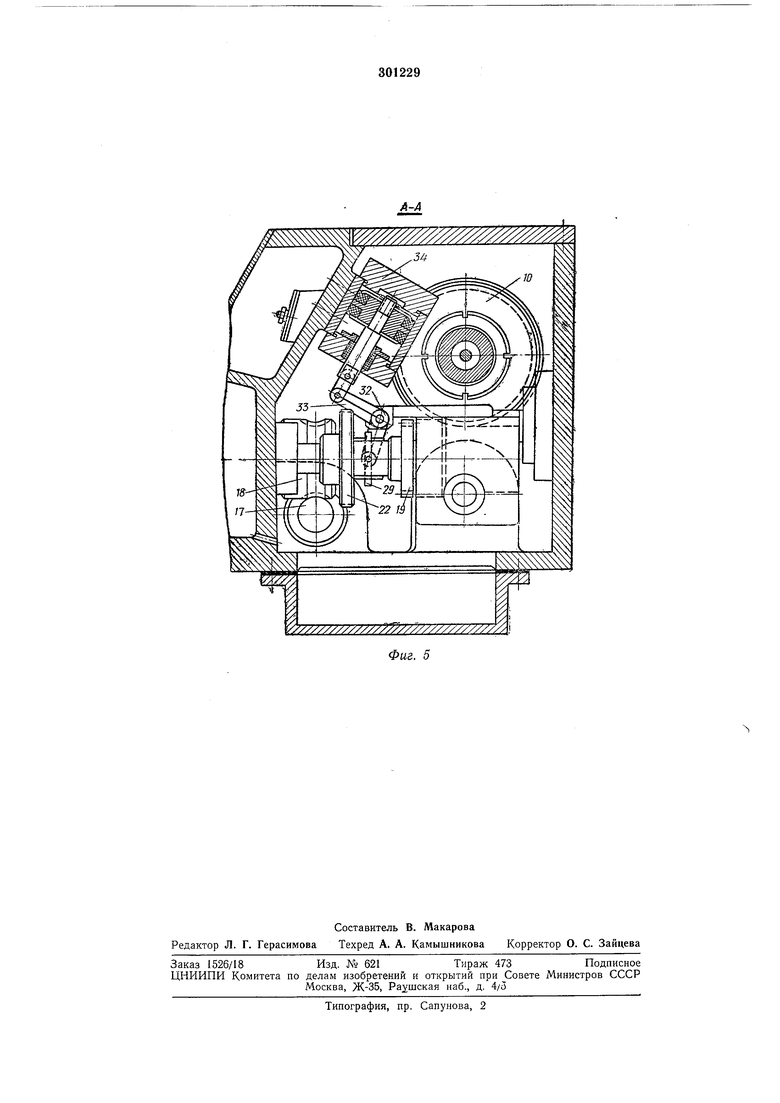
На фиг. 1 представлена шпиндельная бабка; на фиг. 2-механизм перемещения индукционного датчика; на фиг. 3-разрез по механизму переключения; на фиг. 4-разрез по неподвижному датчику; на фиг. 5-разрез по пневмоцилиндру переключения подач.
ного движения расположен на шкиве 5 подачи с закрепленной неподвижно шестерней 6 с заостренными у вершины зубцами.
Шкив 5 подачи с помощью опор 7 расположен на разгруженном фланце 8. Проходящий через шлицевое отверстие шкива подачи торсионный валик 9 соединяется со шпинделем станка 3, в передней части которого ненодвижно установлена вторая шестерня JO. Напротив шестерен 6 и JO расположены индукционные датчики П, один из которых неподвижен, а второй - подвижный для обеспечения механического сдвига фаз. Подвилсиый датчик // (см. фиг. 1 и 2) установлен на фланце 12 круговых направляющих корпуса. Фланец 12 соединен с винтом перемещения датчика 13. Для выбора люфта применена пружина 14. Для фиксирования положения датчика 11 используется болт 15.
В корпусе шпиндельной бабки имеются второй шкив подачи 16, червячная пара колес 17 и 18, переборная группа шестерен 19, 20, 21 и 22, пара сменных шестерен 23 и 24, червячная пара 25 и 26, а червячное колесо 26
соединено с электромагнитной муфтой рабочей подачи 27, расположенной на валу 28. На шлидевом валу червячного колеса 18 имеется двустороняя соединительная муфта 29. При этом червячное колесо 18 и шестерня 19 устаНа оси 32 в корпусе шпиндельной бабки расположен двуплечий рычаг 33, один конец которого находится в соединении с соединительной муфтой 29, а другой - со штоком пневмоцилиндра 34. Работа шпиндельной бабки происходит следующим образом. Враш,ение от привода главного движения через шкив 4, установленный на шкиве 5 подачи с закрепленной шестерней 6 передается торсионному валику 9, а через него-шпинделю станка 5 с шестерней 10. Токовые импульсы, передаваемые индукционными датчиками 11 за счет механического сдвига, выполняемого путем поворота фланца 12 винтом перемещения датчика 13, при нормальном процессе резания сдвинуты по фазе. При увеличении нагрузок на шничделе станка сверх допустимых торсионный валик 9 скручивается, сдвиг импульсов, идущих ст шестерен 6 и 10, нарушается и совпадает по фазе. Схема согласования вырабатывает сигнал на вывод инструмента из зоны резания. Движение подачи от шкива 5 через шкив 16 червячную пару колес 17 и 18, муфту 29, включенную двуплечим рычагом 33, ипевмоцилиндром 34, на шестерню 22 или шестерни группы 19-22 передается через сменные пары шестерен 23 и 24, червячную пару 25 и 26, электромагнитную муфту рабочей подачи 27 на валу 28. При первой рабочей подаче движение передается через переборную группу шестерен 19 - 22. После врезания инструмента и получения им необходимого направления команда от концевого выключателя через золотник передается пневмоцилиндру 34, а далее двуплечим рычагом 33 соединительная муфта 29 переключается на шестерню 22, и движение передается напрямую со второй рабочей подачей. Предмет изобретения 1. Силовая головка с размещенным в ее корпусе шпинделем, получающим вращение от привода главного движения, и кинематической цепью, сообщающей головке двилсения рабочих подач, отличающаяся тем, что, с целью предотвращения поломки инструмента при перегрузках в процессе обработки, головка снабл ;ена механизмом, выполненным в виде размещенного внутри шпинделя торсионного валика и элементов, например шестерен, взаимодействующих с неподвижным и подвижным индукционным датчиком и закрепленных соответственно внутри корпуса в передней части шпинделя и на приводном шкиве вне корпуса головки. 2. Силовая головка по п. 1, отли-юющаяся тем, что, с целью повышения быстродействия при получении двух рабочих подач, она снабжена механизмом автоматического переключения, выполненным в виде нпевмоцилиндра, воздействующего через рычажную систему на соединительную муфту цепи подач.
.A,xv
j
фуг.
/2 2 (Риг J
21 23

| название | год | авторы | номер документа |
|---|---|---|---|
| Шпиндельный узел металлобрабатывающего станка | 1976 |
|
SU618197A1 |
| Сверлильный станок | 1980 |
|
SU889294A1 |
| Силовая головка | 1986 |
|
SU1342624A1 |
| СТАНОК ДЛЯ ПРИТИРКИ РАБОЧИХ ПОВЕРХНОСТЕЙ ЗУБЬЕВ КОНИЧЕСКИХ ЗУБЧАТЫХ КОЛЕС | 1969 |
|
SU248461A1 |
| Токарный многооперационный станок | 1985 |
|
SU1321526A1 |
| Станок токарно-винторезный универсальный | 2019 |
|
RU2737905C1 |
| АВТОМАТИЧЕСКОЕ ДЕЛИТЕЛЬНОЕ ПРИСПОСОБЛЕНИЕ | 1966 |
|
SU185184A1 |
| Шпиндельный узел радиально-сверлильного станка | 1976 |
|
SU610616A1 |
| Бесконтактное предохранительное устройство для предотвращения поломки инструмента | 1972 |
|
SU442022A1 |
| ОДНОШПИНДЕЛЬНЫЙ ТОКАРНЫЙ АВТОМАТ | 1935 |
|
SU50823A1 |