Изобретение относится к грузозахватным устройствам, а именно к приспособлениям, применяемым для монтажа многоконсольных колонн при возведении многоэтажных каркасных зданий.
Известно захватное устройство для колонн с консолями, содержащее траверсу с гибкими подвесками, на концах которых закреплена П-образная рамка со съемной планкой, соединенной с рамкой посредством фиксаторов 1.
Недостатком этого устройства является необходимость разъединения П-образной захватной рамки и планки на высоте с применением лестницы или других средств подмащивания, а также трудоемкость соединения-разъединения их из-за большого количества выступов На штырях П-образной рамки, что снижает , удобство и безопасность монтажа многоконсольных колонн.
Известен также захват для подъема колонн с консолями, подвешиваемый к грузоподъемному механизму посредством траверсы с гибкими подвесками, содержит закрепленную на концах гибких подвесок Побразную рамку с замыкающей проем последней планкой, фиксатор рабочего положения планки, включаюшей в себя подпружиненный палец 2.
Однако известный захват не обеспечивает безопасность монтажа колонн, из-за возможной расстроповки поднятой колонны, так как отсутствует устройство для фиксации пальцев.
Цель изобретения - улучшение условий эксплуатации и повышение безопасности монтажа колонн.
Указанная цель достигается тем, что захват для подъема колонн с консолями, подвещиваемый к грузоподъемному механизму посредством траверсы с гибкими подвесками, содержит закрепленную на концах гибких подвесок П-образную рамку с замыкающей проем последней планкой, фиксатор рабочего положения планки, включающий в себя подпружиненный палец, снабжен закрепленным с возможностью поворота на раме рычагом с отогнутым в ее сторону концом, а упомянутый фиксатор снабжен стопорным штырем, расположенным перпендикулярно пальцу со смещением относительно его продольной оси с возможностью взаимодействия одним концом с рычагом, а другим - по касательной с проточкой, которая выполнена в подпружияенном пальце.
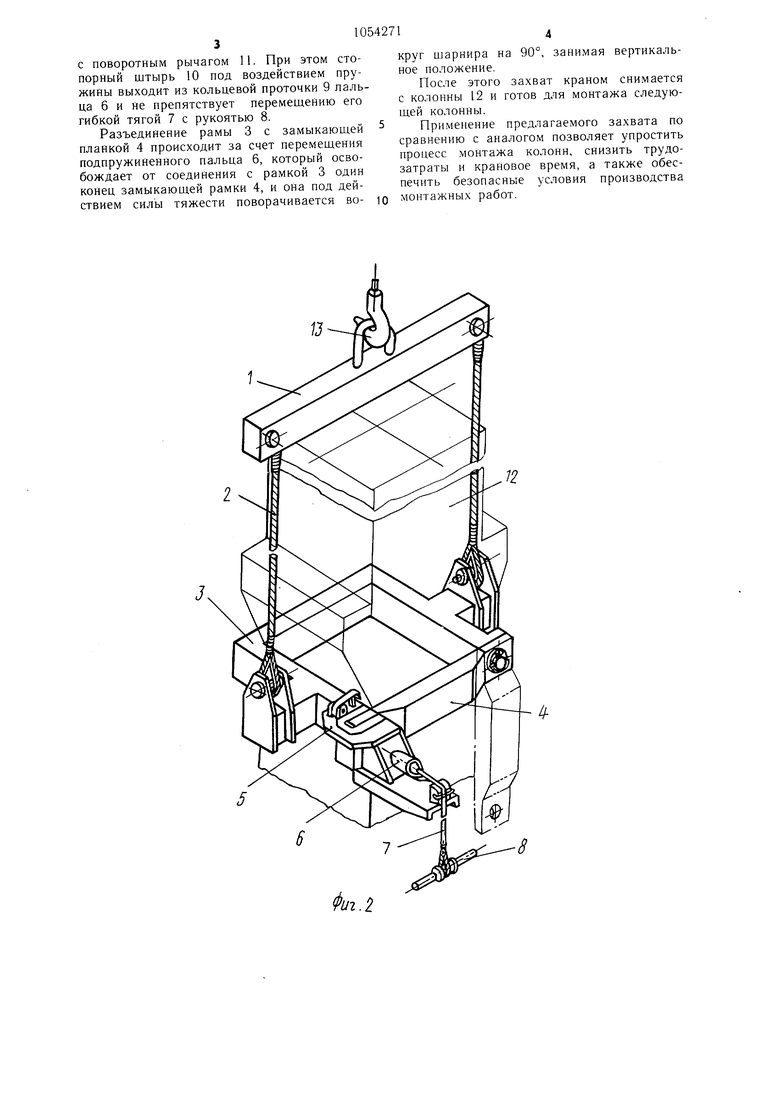
На фиг. 1 изображен захват для подъема колонн с консолями общий вид; на фиг. 2П-образная рамка с замыкающей планкой; на фиг. 3 - фиксирующее приспособление; на фиг. 4 - разрез А-А на фиг. 3.
Захват (фиг. 1 и 2) содержит траверсу 1 с гибкими подвесками -2, на концах которых закреплена П-образная рамка 3 с яямыкающей планкой 4.
Кроме того, он снабжен фиксирующим приспособлением 5, смонтированным на конце П-образной рамки 3 и выполненным в виде подпружиненного пальца 6, на одном конце которого закреплена гибкая тяга 7 с рукоятью 8, а на другом конце образована кольцевая проточка 9, и стопорного подпружиненного штыря 10, один конец которого входит в кольцевую проточку 9 пальца 6, а другой - контактирует с поворотным рычагом 11, взаимодействующим с консолью колонны 12, при этом замыкающая планка 4 соединена с П-образной рамкой 3 одним концом шарнирно, а другимразъемно при помощи подпружиненного пальца 6 фиксирующего приспособления 5.
Подъем колонны 12 осуществляется с помощью крюка 13 монтажного крана.
Захват эксплуатируют следующим образом.
Траверсу 1 навещивают на крюк 13 монQ тажного крана и захват в раскрытом положении (т. е. с отсоединенным от рамки 3 концом замыкающей планки 4) подают к месту складирования колонн.
Затем на колонну 12, лежащую на подкладках, под верхние консоли устанавли5 вают захват и закрывают его путем соединения конца планки 4 с рамки 3 при помощи пальца 6 фиксирующего приспособления 5.
Для соединения необходимо приложить тянущее усилие к гибкой тяге 7 с целью
перемещения подпружиненного пальца 6 в крайнее положение, поверну1ь замыкающую планку 4 на 90° и снять усилие для возвращения пальца 6 в исходное положение под действием пружины.
После этого осуществляют подъем колонны 12 при помощи крана.
При подъеме колонны 12 захватом она постепенно занимает вертикальное положение и вся Нагрузка от веса колонны через консоли воспринимается П-образной
рамкой 3. При этом консоль колонны 12 воздействует через поворотный рычаг 11 на стопорный штырь 10, который входит в кольцевую проточку 9 пальца 6 и тем самым исключает самопроизвольное разъединение П-образНой рамки 3 и замыкаю щей планки 4.
После установки колонны 12 в проектное положение и временного закрепления ее захват снижается с колонны.
Снятие захвата с колонны осуществляется крюком 13 монтажного крана после дистанционного разъединения рамки 3 с замыкающей планкой 4 путем приложения тянущего усилия к гибкой тяге 7 с рукоятью 8.
2 Для снятия захвата необходимо траверсу 1, а следовательно, и рамку 3 с замыкающей планкой 4 опустить вниз до прекращения контакта консоли колонны 12
с поворотным рычагом 11. При этом стопорный штырь 10 под воздействием пружины выходит из кольцевой проточки 9 лальца 6 и не препятствует перемещению его гибкой тягой 7 с рукоятью 8.
Разъединение рамы 3 с замыкающей планкой 4 происходит за счет перемещения подпружиненного пальца 6, который освобождает от соединения с рамкой 3 один конец замыкающей рамки 4, и она под действием силы тяжести поворачивается вокруг щарнира на 90°, занимая вертикальное положение.
После этого захват краном снимается с колонны 12 и готов для монтажа следующей колонны.
Применение предлагаемого захвата по сравнению с аналогом позволяет упростить процесс монтажа колонн, снизить трудозатраты и крановое время, а также обеспечить безопасные условия производства монтажных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для монтажа колонн с консолями | 1990 |
|
SU1760054A2 |
| Устройство для монтажа колонн с консолями | 1987 |
|
SU1414951A1 |
| Устройство для монтажа колонн с консолями | 1986 |
|
SU1408038A1 |
| Висячий мост и способ его монтажа | 1988 |
|
SU1546534A1 |
| Захват для подъема и монтажа колонн | 1980 |
|
SU935439A1 |
| Кондуктор для монтажа колонн | 1983 |
|
SU1162928A2 |
| Захватное устройство для колонн | 1982 |
|
SU1051031A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Устройство для подъема длинномерной конструкции в вертикальное положение | 1985 |
|
SU1291542A1 |
| СПОСОБ МОНТАЖА КОЛОНН И УСТРОЙСТВО ДЛЯ ЗАХВАТА КОЛОНН | 2006 |
|
RU2334067C1 |

ЗАХВАТ ДЛЯ ПОДЪЕМА КОЛОНН С КОНСОЛЯ/ И, подвешиваемый к грузоподъемному механизму посредством траверсы с гибкими подвесками, содержит закрепленную на концах гибких подвесок П-образную рамку с замыкающей проем последней планкой, фиксатор рабочего положения планки, включающий в себя подпружиненный палец, отличающийся тем, что, с целью улучшения условий эксплуатации и повышения безопасности монтажа колонн, он снабжен закрепленным с возможностью поворота на раме рычагом с отогнутым в ее сторону концом, а упомянутый фиксатор снабжен стопорным штырем, расположенным перпендикулярно пальцу со смещением относительно его продольной оси с возможностью взаимодействия одним концом с рычагом, а другим - по касательной с проточкой, которая выпол g нена в подпружиненном пальце. (Л СП N кэ 
0
5
12
8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захватное устройство для подъема колонн с консолями | 1972 |
|
SU439461A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Захватное устройство для колонн сКОНСОляМи | 1978 |
|
SU819039A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
