Устройство предполагается использовать при автоматизации перемещающихся объектов: лифтов, подъемпиков, загрузочных тележек и др.
Р1звестио устройство для автоматического выбора нанравлеиия движения объекта, содержащее последовательно соединенные схемы разделения, собирательные схемы, переключатель нунктов следования и датчики местонахождения объекта.
Схема устройства иредиолагает поступление от датчиков местонахождения объекта ненрерывных сигналов, что возможно только при использовапии в цепи каждого датчика запоминаюндего элемента. При увеличении числа датчиков пропорциопально ему увеличивается и количество иснользуемых в устройстве схем совпадения и разделительных схем. Это ириводит к увеличению гарантийных размеров устройства и его стоимости.
В нредлагаемом устройстве в целях устранения этих иедостатков переключатель имеет два контактных поля, первая щетка которого сдвинута но отношению ко второй на одни контакт и подключена ко входу сброса первого запомииающего блока, к заиреща още1му входу нервой схемы «Запрет, другой вход которой соединен с выходом носледней из последовательно соединенных разделительных схем, и ко входу второй схемы «Запрет, а
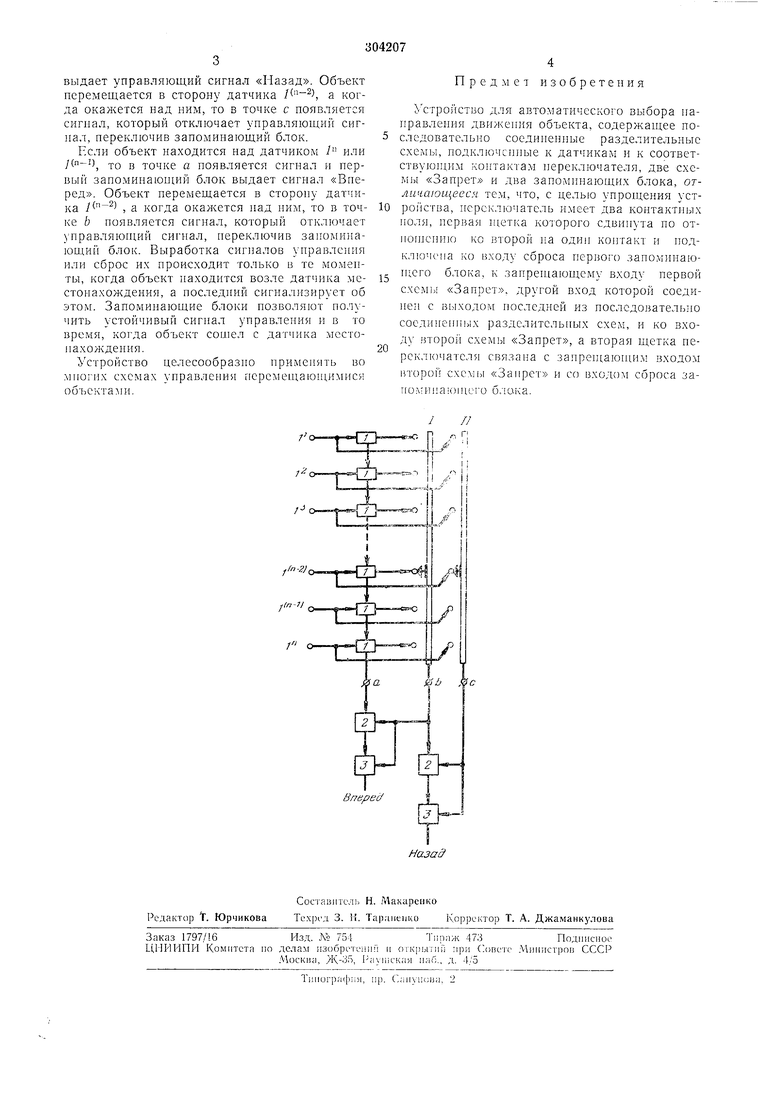
вторая щетка связана с запрещающим входом второй схемы «Занрет и со входом сброса второго заиоминающего блока. На чертеже ноказана схема предлагаемого
устройства.
Она содержит переключатель с двумя контактными полями I и П и соответствующие им щетки. Каждый из датчиков /i, /2, 1, . . ., / подключен на один из входов соответствующей ему разделительной схемы, соединенной с контактами поля I, и к соответствующему контакту ноля П. Все схемы разделения подключены носледовательно на вход нервой схемы «Занрет 2, которая выходом соединена
со входом запоминающего блока 3, а запрещающпм входом со щеткой коитактного поля I, входом сброса иервого запомииающего блока и входом второй схемы «Запрет. Вторая схема «Запрет выходом соединена со входом
второго заноминающего блока, а занрепгающим входом - со щеткой контактного ноля П и входом сброса второго запоминающего блока. Сигиалы управления снимаются с выходов запо инающпх блоков. Возможное направлепие сигпалов в устройстве показано на схеме стрелками.
Устройство работает следующим образом. Если объект находится над любым из датчиков /1, /2, ..., /(), то в точках а и Ь нояв
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1974 |
|
SU622730A1 |
| Устройство для автоматического выбора направления движения объекта | 1973 |
|
SU552254A1 |
| Устройство для автоматическогоВыбОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU800071A1 |
| Устройство для управления аппаратомМАгНиТНОй зАпиСи | 1979 |
|
SU811326A1 |
| УСТРОЙСТВО ТЕЛЕУПРАВЛЕНИЯ, ТЕЛЕСИГНАЛИЗАЦИИ С | 1964 |
|
SU164339A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВЫБОРА НАПРАВЛЕНИЯ ДВИЖЕНИЯ ОБЪЕКТА | 1968 |
|
SU209067A1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ПРЕОБРАЗОВАТЕЛЕЙ УГОЛ-КОД | 1971 |
|
SU424205A1 |
| Устройство задержки | 1980 |
|
SU902214A1 |
| Корректор межсимвольных искажений | 1975 |
|
SU574856A1 |
| Устройство для передачи информации в системе телесигнализации | 1987 |
|
SU1509968A1 |
