1
Изобретение относится к области контроля и управления перемещающимися объектами и может быть использовано для автоматизации производственных процессов, включающих доставку материалов в места назначения.
Известно устройство для автоматического выбора направления движения объекта, например подвесной полки механизированного стеллажа, содержащее датчики положения, блок ввода информации, сумматор, блоки сравнения и совпадения и логические элементы И и ИЛИ.
Недостатком устройства является его сложность.
Прототипом изобретения является устройство для автоматического выбора направления движения объекта, содержащее датчики положения, блоки памяти, схему «Запрет, выходы которой соединены с одними из входов блоков памяти, и переключатель с двумя контактными полями, одна из щеток которого, взаимодействующая с датчиками положения, соединена с одним из входов первого блока памяти, а другая - с одним из входов схемы «Запрет.
Недостатком его является низкая надежность работы, так как в случае выхода датчиков положения из строя или случайного их включения на блок намяти поступают два сигнала, один из которых ложный. На выходе
устройства в этом случае получаются одновременно два управляющих сигнала: «Назад и «Вперед, что может привести к аварийному режиму.
Цель изобретения - повышение надежности работы устройства.
Для этого устройство снабжено переключателем с одним контактным полем, щетка которого соединена с другим входом схемы «Запрет и с одним из входов второго блока памяти, другой вход которого соединен с первой щеткой переключателя с двумя контактными полями, вторая щетка которого подключена iKO входу первого блока памяти, при этом контакты переключателей соединены между собой через резисторы, включенные в мостовую схему, в одну диагональ которой включен источник питания, а в другую - вторая щетка переключателя с двумя контактными полями и щетка переключателя с одним контактным полем.
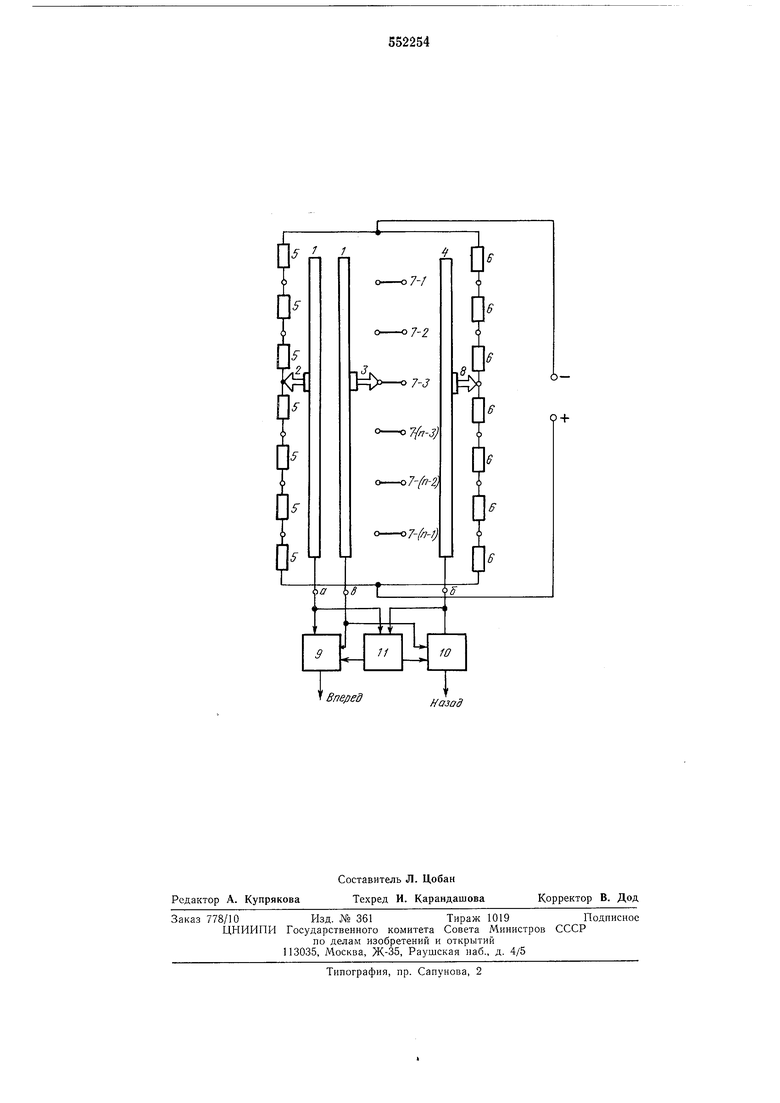
На чертеже представлена структурная с.ема устройства.
Устройство содержит переключатель 1 с двумя контактными полями для разрешения движения щетки 2 и 3 которого перемещаются синхронно, переключатель 4 с одним контактным полем для исполнения команды. Щетка 2 переключателя 1 соединена с потенциальными ступенями мостовой схемы, образованной
резисторами 5 и 6, и подключена к датчикам положения 7-1 - 7-(п-1). Щетка 8 нереключателя 4 также соединена с потенциальными ступенями мостовой схемы. Устройство содержит также блоки 9, 10 памяти, первый из которых соединен со щетками 2 и 3 переключателя 1, а второй - со щеткой 8 переключателя 4 и щеткой 3 переключателя 1, схему «Запрет 11, входы которой подключены к щеткам 2 и 8 соответственно переключателей 1 и 4, а выходы - ко входам блоков 9, 10 памяти. Сигналы управления «Вперед, «Назад, снимаемые с выходов блоков памяти, показаны на схеме стрелками.
Устройство работает следующим образом.
В исходном состоянии все щетки переключателей стоят в одном положении. Мостовая схема уравновешена, в точках с и б потенциал равен нулю, команды на движение нет.
Если объект должен перемещаться в сторону датчиков 7-2 или 7-1, то переключатель 1 (щетки 2 и 3) ставят в одно из этих положений. При этом происходит разбаланс мостовой схемы, в точке а появляется отрицательный сигнал рассогласования относительно точки б, который поступает в блок 9 памяти, где запоминается команда на движение вперед, и на схему «Запрет 11. При установлении щетки переключателя 4 в ранее выбранное положение (соответствующее датчикам 7-2 или 7-1) мостовая схема уравновещивается, разность потенциалов в точках а и б равна нулю, запрещающий сигнал со схемы «Запрет снимается и блок 9 памяти выдает команду на движение вперед. Объект перемещается в сторону выбранного датчика и, когда окажется над ним, в точке в появляется сигнал, который отключает управляющий сигнал «Вперед.
Если объект должен перемещаться в сторону датчиков 7-(п-2); 7-(п-3) или 7-(га-1), переключатель 1 ставится в одно из этих положений, что приводит к разбалансу мостовой схемы, и положительный сигнал рассогласования в точках а и б поступает в блок 10 памяти, где запоминается команда на движение назад, и на схему «Запрет. При установлении щетки 8 переключателя 4 в выбранное положение, мостовая схема уравновещивается, разность потенциалов в точках а и б становится равной нулю, запрещающий сигнал со схемы «Запрет снимается и блок 10 памяти выдает команду на движение назад. Объект
перемещается в сторону выбранного датчика и, когда окажется над ним, в точке в появляется сигнал, который отключает управляющий сигнал «Назад. Сброс управляющих сигналов происходит
только в те момеиты, когда объект находится над датчиком положения.
Формула изобретения
Устройство для автоматического выбора направления движения объекта, содержащее датчики положения, блоки памяти, схему «Запрет, выходы которой соединены с одними из входов блоков памяти, и переключатель с двумя контактными полями, одна из щеток
которого, взаимодействующая с датчиками положения, соединена с одним из входов первого блока памяти, а другая - с одним из входов схемы «Запрет, отличающееся тем, что, с целью повышения надежности работы устройства, оно снабжено переключателем с одним контактным полем, щетка которого соединена с другим входом схемы «Запрет и с одним из входов второго блока памяти, другой вход которого соединен с первой
щет1кой переключателя с двумя контактными полями, вторая щетка которого подключена ко входу первого блока памяти, при этом контакты переключателей соединены между собой через резисторы, включенные в мостовую
схему, в одну диагональ которой включен источник питания, а в другую - вторая щетка переключателя с двумя контактными полями и щетка переключателя с одним контактным полем.
5 L L
5
f
5
P
o7-J
о-
9 +
o7{n-j)
G
07Y/.-/;
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматическогоВыбОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU800071A1 |
| Устройство для автоматического выбора направления движения объекта | 1974 |
|
SU622730A1 |
| Устройство для автоматического выбора направления движения объекта | 1982 |
|
SU1096169A1 |
| Временное программное устройство | 1981 |
|
SU993354A1 |
| Устройство для адресования подвижного объекта | 1988 |
|
SU1558821A1 |
| Устройство для управления автооператором полуавтоматических линий гальванопокрытий | 1977 |
|
SU708001A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1164849A1 |
| Устройство для управления транспортером | 1976 |
|
SU738969A1 |
| Устройство для автоматического управления подвижным объектом | 1983 |
|
SU1094818A1 |
| Устройство для управления реверсивным электроприводом | 1981 |
|
SU993209A1 |
a
