Известно устройство автоматического выбора направления движения объекта, содержащее две группы схем совпадения, собирательные схемы, переключатель пункгов следования и датчики местонахождения объекта.
Предложенное устройство отличается от известных тем, что Б нем каждый датчик местонахождения объекта, кроме первого и последнего, соединен со входом соответствуюпцей схемы совпадения как первой, так и второй группы, выходы каждой группы схем совпадения подключены ко входам одной из собирательных схем, вторые входы каждой группы схем совпадений соединены с выходами соединенных последовательно схем разделения, а каждый контакт переключателя пунктов следования, кроме первого и последнего, подключен на вход соответствующей схемы разделения как первой, так и второй группы. Это позволяет упростить устройство.
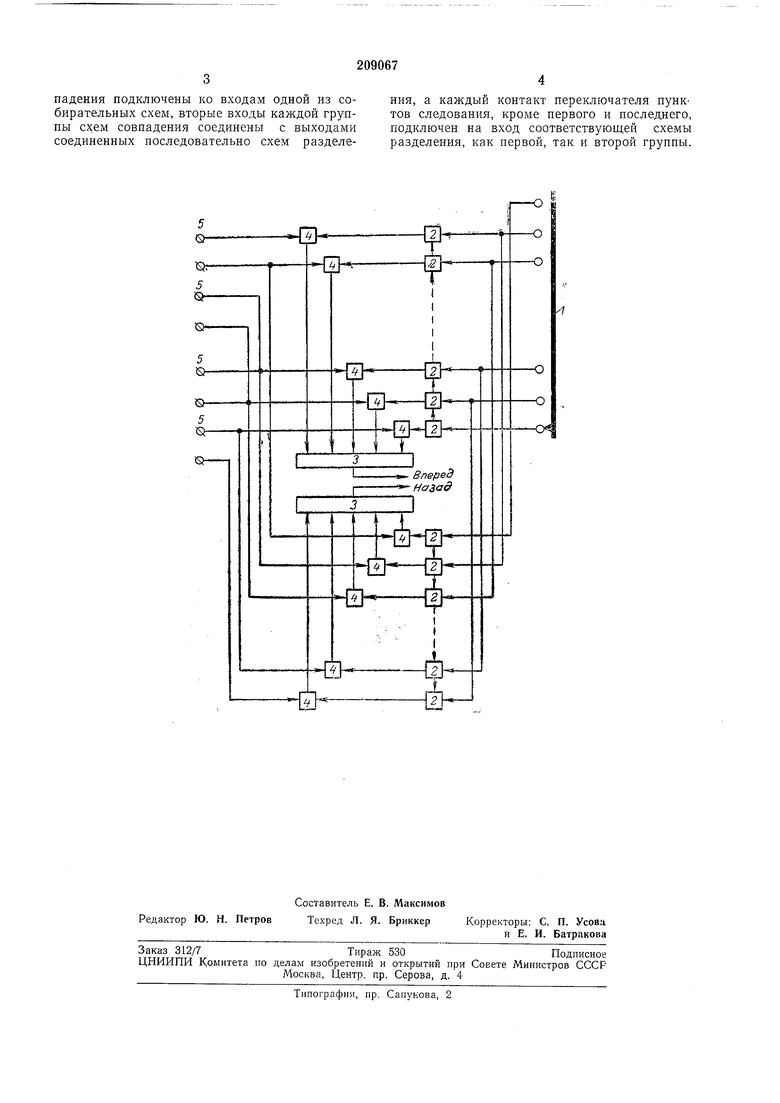
Схема устройства приведена на чертел е.
Устройство состоит из двух групп схемы совпадения 4, один вход каждой из которых соединен с выходом соответствующей разделительной схемы 2, другой - с выходом одного из датчиков местонахождения объекта. Выходы одной из групп через собирательную схему 3 соединены с выходной щиной «вперед,, а другой - с шиной «назад.
Устройство работает следующим образом.
Так как разделительные схемы 2 соединены
последовательно, то при подаче сигнала от
переключателя / на любую из этих схем он
распространяется на последующие в направлении, указанном на чертеже. В любой момент времени с одного из датчиков 5 (кроме крайних) поступает сигнал на две схемы совпадения 4, но выходной сигнал «вперед или
«пазад через собирательную схему 3 выдаст лищь та схема совпадения, работа которой разрешена разделительными схемами 2, управляемыми от переключателя 1. При нормальной работе сигнал имеется только на одной из выходных шин, но при приходе объекта в пункт следования, установленный переключателем, сигнал исчезает.
Предмет изобретения
Устройство для автоматического выбора направления движения объекта, содержащее две группы схем совпадения, собирательные схемы, переключатель пунктов следования и датчики, отличающееся тем, что, с целью упрощения устройства, в нем каждый датчик местонахождения объекта, кроме первого и последнего, соединен со входом соответствующей схемы совпадения как первой, так и второй группы, выходы каждой группы схем совпадения подключены ко входам одной из собирательных схем, вторые входы каждой группы схем совпадения соединены с выходами соединенных последовательно схем разделения, а каждый контакт переключателя пунктов следования, кроме первого и последнего, подключен на вход соответствующей схемы разделения, как первой, так и второй группы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВЫБОРА НАПРАВЛЕНИЯ ДВИЖЕНИЯ ОБЪЕКТА | 1971 |
|
SU304207A1 |
| Устройство для автоматического выбора направления перемещения объекта | 1973 |
|
SU506003A1 |
| ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР С ЗАПОЛНЕНИЕМ ОПОРНОГО СЧЕТЧИКА МНОГОРАЗРЯДНЫМИ КОДАМИ | 1968 |
|
SU206911A1 |
| АДАПТИВНОЕ ТЕЛЕИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1970 |
|
SU419946A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ГОРНОТРАНСПОРТНЫМИ РАБОТАМИ НА КАРЬЕРЕ | 1968 |
|
SU209850A1 |
| Устройство автоматического поддержания прямолинейности секций базы угледобывающего агрегата | 1980 |
|
SU935628A2 |
| Устройство для охранно-пожарной сигнализации | 1978 |
|
SU788136A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ ОБЪЕКТОВ С ИНЕРЦИОННЫМИ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 1973 |
|
SU393762A1 |
| Устройство телемеханики для сосредоточенных объектов | 1975 |
|
SU532878A1 |
| ДЕШИФРАТОР | 1972 |
|
SU430375A1 |
Назад
