(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫБОРА НАПРАВЛЕНИЯ ДВИЖЕНИЯ ОБЪЕКТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортером | 1976 |
|
SU738969A1 |
| Устройство для автоматического адресования подвижных объектов | 1977 |
|
SU650933A1 |
| Устройство для автоматического выбора направления движения объекта | 1976 |
|
SU633774A1 |
| Устройство для управления транспортером | 1971 |
|
SU461874A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Обучающее устройство | 1984 |
|
SU1249566A1 |
| ТЕЛЕМЕХАНИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОБМЕНА ДИСКРЕТНОЙ И НЕПРЕРЫВНОЙ ИНФОРМАЦИЕЙ | 1967 |
|
SU194913A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СИГНАЛОВ С ПРОГРАММНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 1997 |
|
RU2110890C1 |
| Устройство для автоматического адресования подъемника | 1980 |
|
SU977347A1 |
| Устройство для точного адресования передаточной тележки | 1978 |
|
SU747789A1 |
Изобретение относится к области а&- томатического управления движущимися объектами и может быть использовано для управления движением загрузочных тележек, например в системе автоматического управления дозированием сыпучих компонентов.
Известны устройства для автоматического выбора направления движения объекта, содержащие последовательно соединенные разделительные схемы, подклки чанные к датчикам и к соответствующим контактам Переключателя, две схемы Запрет и два запоминающих блока, причем переключатель имеет два контактных поле, первая щетка которого сдвинута ло oxfto-i шегапо ко второй на один контакт и под-, кшочена ко входу сброса первого запом& нающего блока, к запрещающему входу первой схемы Запрет, другой вход котс рой Соединен с выходом последней из noo ледовательно соединенных разделительных схем, и ко входу второй схемы Запрет, а вторая щетка переключателя связана с запрещаклцнм входом второй схемы 3aiw
рет и со входом сброса запоминающего блока l.
Указанное устройство позволяет осуществить автоматический выбор направления движения объекта к одному адресу, зарар-« нее заданному, но не осуществляет шдбор направления движения к ближайшему из двух адресов.
Наиболее близким техническим решением к изобретению является устройство для автоматического выбора направления движения объекта, содержапхее датчики положения объекта, блок ввода информапйи, блок Определения реюстояшш до по зипий адресования, включающий в бебя сумматоры и блок сравнения, входы KOTOIрого соединены с выходами сумматоров, а каждый выход - с одним иа входов одного из блоков команд направления движения 23.
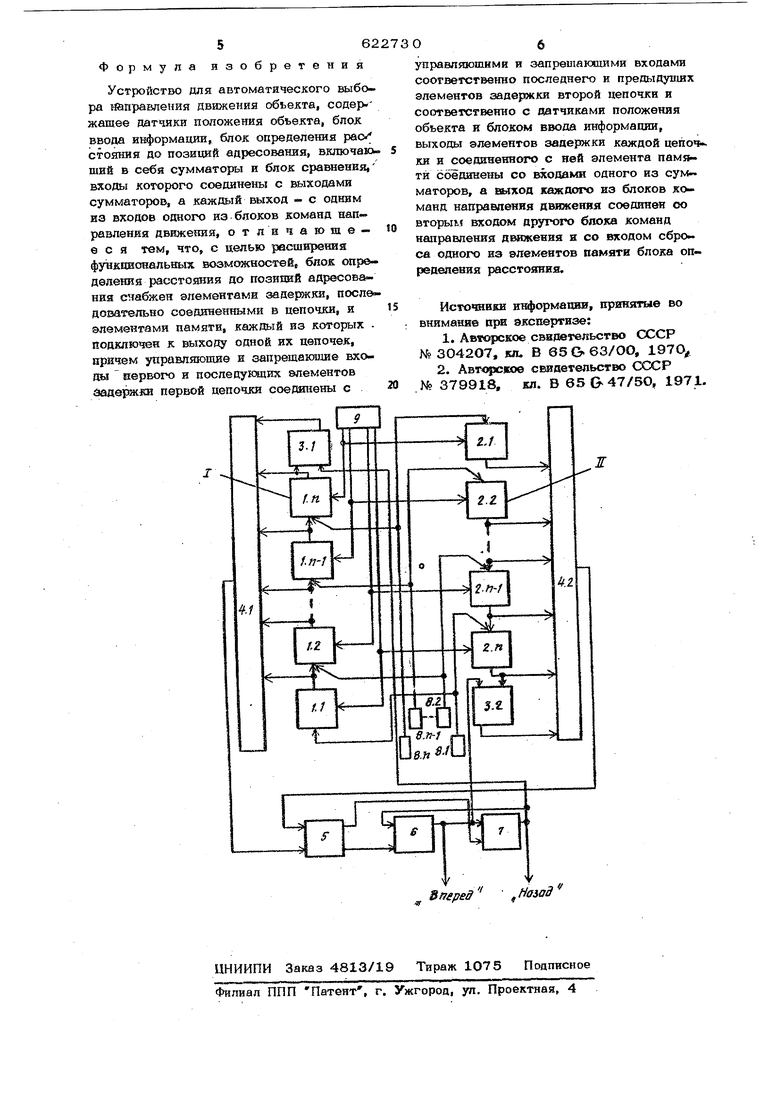
Это устройство позволяет осуществить автоматический выбор кратчайщетх) направления перемещения объекта к одно му из заданных адресов, расположенных по окртжноств, но не .позволяет выбрать кратчайший путь перемещения объекта при одновременном задании двух адресов. Цель изобретения расширение функциональных возможностей устройства. Указанная цель постигается тем, что блок определения расстояния до позиций адресования снабжен элементами задержки, последовательно соединенными в цепочки, и элементами памяти, каждый из которых подключен к выходу одной из цепочек, причем управляклдие и запрещаюиш входы первого и последующих элементов .задержки первой цепочки соединены с упра ляюшими и запрещающими входами соот. ветственно последнего и предыдущих элементов задержки второй цепочки и соотеетственно с датчиками положения объекта иблоков ввода информации, выходы элеме тов задержки каждой цепочки и соединенного с ней элемента памяти соединены со входами одного йз сумматоров, а вы ход каждого из блоков команд направлекия движения соединен со вторым входом другого блока команд направления дви жения и со входом сброса одного из эле ментов памяти блока определения расстоз На чертеже представлена блок-схема устройства. Устройство содержит элементы задержки 1.1, 1.2 . . .,1-Пи 2.1, 2.2 .„2, соединенные последовательно в две цепоч ки I и | . &.1ходы калсдой из цепочек J и R соединены cooTseixJTBeHHo с эле™ ментами памяти 3,1 и 3,2. Выходы эле ментов задержки каждой из цепо«юк 2 и II и соединенных с ними элементов пам ти 3.1 и 2.2 соединены со входами соот ветствующих сумматоров 4.1 и 4.2, выхо ды которых соединены со входами блока сравнения 5, а выходы последнего с соответствующими блоками команд нег1 равленкя движения 6 и 7. Выкой блока 6 команд направления дви жения соеД} нен со входом сброса элемен та памяти 3,2 и со вторым входом блока 7 команд направления движения, а вы« ход блока 7 соединен со входом сброса элемента памяти 3.1 и со вторым вхо. дом блока 6. Кроме того, общие управляющие входы элементов 1.1 и 2.И ,1.2 и .2/7-1 и т.д соединены соответственно с датчиками положения 8.1, 8.2 . . . 8.1 , а общие запрещающие входы элементов задержки 1.1 и 2.П , 1.2 и 2. и т.д. соепинены с блоком ввода информации 9. Устройство работает следующим образом. Сигнал с датчика положения объекта, под которым находится весовая тележка, поступает на управляющие входы СООТЕМЭТ ствующих элементов задержки. Одновременно поступает сигнал с блока ввода информации 9 на запрещающие входы элементов задержки, соответствующих тем объектам, к которым можно двигаться. На входах каждого из сумматоров 4.1 и 4.2 появляется серия импульсов в результате, последовательного яапуска элементов задержки, расположенных между элементом задержки,, на управляющий вход которого поступил сигнал с датчиков положения, и элементом задерн ки, у которого имеется сигнал на запреш.а1ошем входе. Количество имгЕульеов в каждой из серий зависит от числа эяемеитов задерж кк, выдавших и fпyльc, то есть от числа обьекгов, расположенных между ч-ем том, под которым стоит телелска и тем, к KOTOpoiCsy можно двигаться. Каждый нз сумматоров 4.1 и 4,2 вьшает на выходе.сигнал, по длительности пропоргиональный количеству входных импульсов, а блок сравнення 5 в зависИ. мости от относительной длительности поступающего на его входы сигналов выдает сигнал на блок 6 команд направления tiSK жения, который выдает .команду вперед или на блок 7 ком&аз. направления дв.с«е. . iiUHf который выдает команду назад. При достажении задацн1 5х дагчнхов полонсения происходит сброс блоков б к 7 команд направления двюкения. В случае, есяя объекты к ко-горым .можно двигаться, находятся по одну сторону от тележки, в серии импульсов, поступио шей на входы одного из сумматоров 4.1 или 4,2, пocлeдни f будет сигнал с выхо да )гветствующего элемента памяти 3.1 йлн :3,П , который возвратдается в исходное положение после шлбора калра леиия цвижекйя. Выработка тфавлекия или сброс эгих команд происходят только в те моменты 5 когда тележка находится возле датчиков местотгахожденияв п rnxv. /гедние снгиа/газнруют об этом. Наличи:е элементов задерж ш с элемеЕ™ тами памяти, соедашешнях оцредедеь11{ым образом в две цепочки, позволяет осутдест вить выбор направления движения к бли жайглему из нескольких объектов, что можно использовать при упра1зяении авЕГ. жением весо}зой 1ележк-и при доз0уюванин в электродном, алю нг шевом, ферросплаа. ном, ст-вкольном и других производствах. 562 Формула изобретения Устройство для автоматического выбора йправления двюкения объекта, содержашее датчики положения обьекта, блок ввода информации, блок определения стояния до позиций адресования, включено ший в себя сумматоры и блок сравнения, входы которого соединены с выходакш сумматоров, а каждый выход «- с одним из входов одного из блоков команд направления движения, о т п н ч а ю та е - вся тем, что, с целью ресши юния функциональных возможностей, биок определения рассто шия до позипий адресования счабжен апементами задержки, последовательно соейиненнымй в цепочки, и элементами памяти, каждый из которых . подключен к выходу одной их цепочек, нричем управляющие и запрещаюидие входы нерЕого и последующих элементов первой цепочки соеданены с О6 управляюшнми и запрешаюшими входами соогветственно последнего и предыдупшх элементов задержки второй цепочки и соответственно с датчиками положения обьекта к блоком ввода информации, выходы элементов задержки каждой цепоч ки и соединенного с ней элемента пам:; тй соединены со шкодами одного из сумматоров, а выход каждого из блоков команд направления двяженвя соединен оо вторым входом другого блока команд направления движения н со входом сброса одного из элементов памяти блока определения расстояния. Источники информации, принятые во внимание пук экспертизе: 1. Авторское сввйвгельство СССР № 3042О7, кл. В 650-63/00, 197О 2. ABTOfscBsoe свидетельство СХХР № 379918, кл. В 650-47/50, 1971.
