Изобретение относится к сельскохозяйственным .машинам, в частности к приспособлениям для разметки рядов.
Известны устройства для ручного полуавтоматического и автоматического управления маркерами сеялки, которые содержат два двуступенчатых блока, механизм и.х стопорения и тросовую гягу. Однако ручной способ управления маркерами связан с большими трудозатратами, особенно при коротких гонах посева. Полуавтоматический способ кроме трудоемкости создает большие неудобсгва трактористу - отвлекает его внимание в момент поворота агрегата, что в конечном итоге снижает производительпость труда. .Лвтоматическое устройство, работающее от двух 1идроцилиндров и нредстаБЛяюш,ее собой обособлепную конструкцию па отдельной ра.ме, весьма сложно.
Предлагаемое устройство отличается тем, что, с целью автоматического юнеремепного включения правого или левого маркера в рабочее положение, а также для подъема рабочего маркера в транспортное положение, опо смонтировано на одной пенодвижной оси, причем блоки прилегают один к другому юрцовымн поверхностями но наибольшему диаметру.
нен в виде одной двузубой собачки, а зубья гобачки расположены в разных плоскостях, соотвегствуюп;пх плоскостям зубчатых вепцов.
С целью максимального поднятия маркера в транспортпое положение из рабочего, устройство снабжено силовым роликом, свободно нерекатываюш,имся по тросу, связываюш,ему оба блока.
Для фиксации маркера при переводе его яз рабочего положения в транспортное на ветви троса, тянущей маркер, установлена упорная шайба, ограничивающая участок троса, но которому перекатывается силовой ролик.
На фиг. 1 изображена машина с предлагаемым устройством, общий вид; па фиг. 2- предлагаемое устройство, вид сбоку; па фиг. 3 - механизм стонорения в разрезе.
Маркеры 1 сеялки 2 соединены между собой тросом 3, который крепится к левому маркеру. Ттрос проходит через большой шкив одного из блоков 4 и переходит на его маленький шкив. С блока трос сходит на силовой ролик 5, связанный со штоко.м гидроцплпндра 6, схватывает его и переходит с малепького шкива блока 7 на его больоюй шкив (на фиг. 1 блоки 4 и 7 показаны раздельно). Сходящая с блока 7 ветвь троса закрепляется на правом маркере па кропщтейпе 8. Па ветвях троса установле1ш упорные
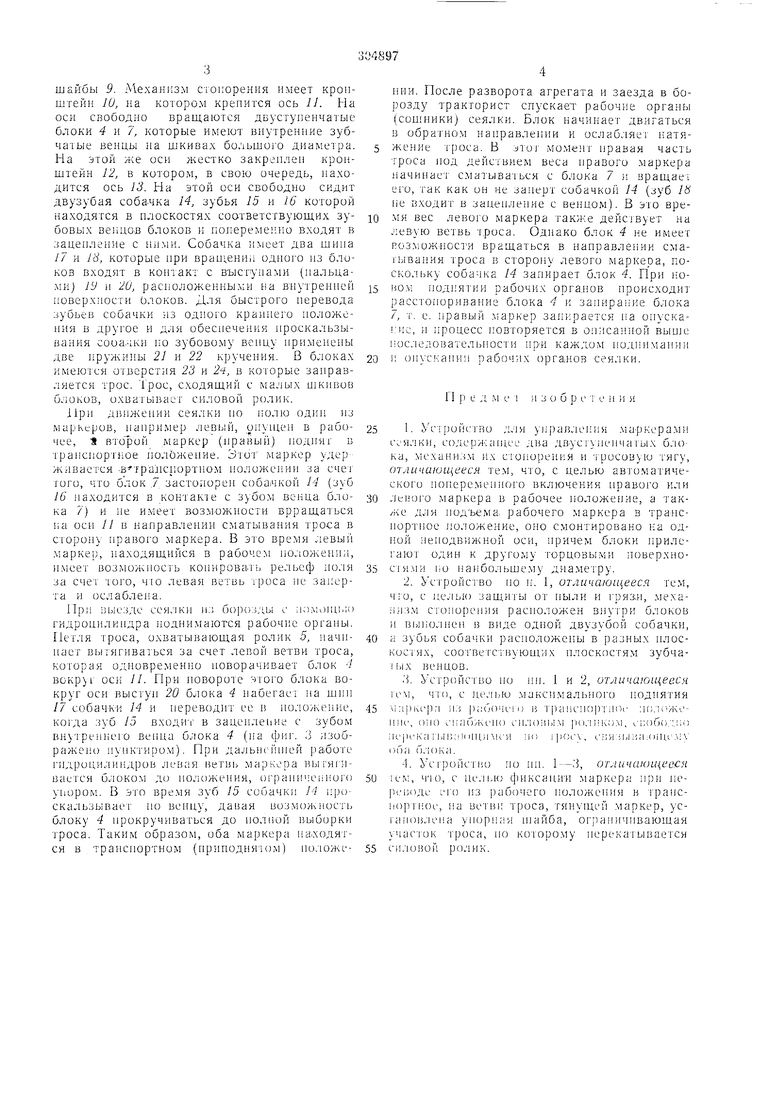
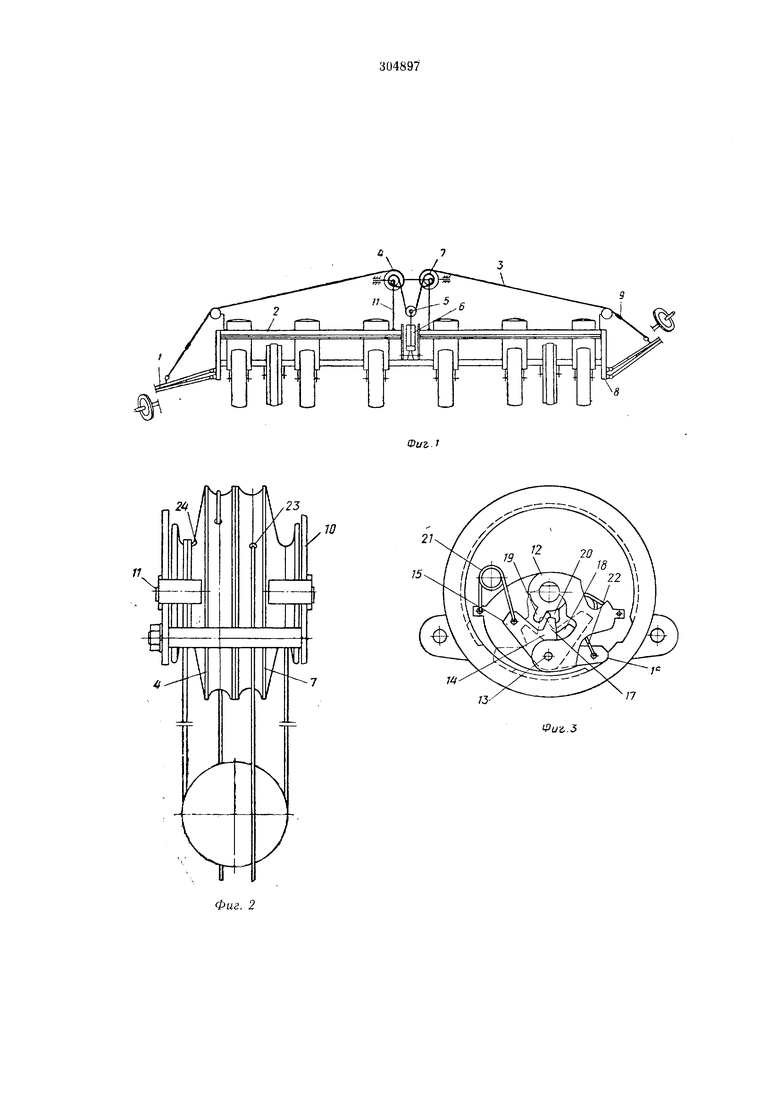
шайбы 9. Механизм стопорения имеет кронштейн W, на котором крепится ось 11. На оси свободно вращаются двуступенчатые блоки 4 н 7, которые имеют внутренние зубчатые венцы на шкивах большо1-о диаметра. На этой же оси жестко закреплен кронштейн 12, в котором, в свою очередь, находится ось 13. На этой оси свободно сидит двузубая собачка 14, зубья 15 и 16 которой находятся в плоскостях соответствующих зубовых венцов блоков и попеременно входят в зацепление с ннмн. Собачка имеет два шина 17 и 18, которые при одного из блоков входят в контакт с выстуиами (пальцами) W и 20, расположенными на внутренней поверхности Олоков. Д.тя быстрого перевода зубьев собачки из одного краине о положения в другое и для обесиечения проскальзывания соиа.-1ки по зубовому венцу ирпменены две пружины 21 и 22 кручения. В блоках имеются отверстия 23 и 24, в которые заправляется трос. Трос, сходящий с малых иживов блоков, охватываст силовой ролик.
При Д1И1жении сеялки по полю один из MapKtpoB, например левый, опущен в рабочее, второй маркер (правый) подняг в транспортпое полЬжение. Этот маркер удер живасгся .втраиснортпом положении за сче1 того, что блок .7 застонореп соба-чкой 14 (зуб
16находится в контакте с зубом венца блока 7) и не имеет возможности врращаться па осп 11 в направлении сматывания троса в сторону правого маркера. В это время левый .маркер, находящийся в рабочем по.тожени;, и.меет возможность коннрова.ть рельеф ноля за счет того, что левая ветвь Ipoca не заперта и ослаблена.
Нрп выезде сеялкп нз борозды е ;i;).ionu.;o гидроцнлипдра подни.маюгся pa6o4iie органы. Нетля троса, охватывающая ролик 5, начннает вытягиваться за счет левой ветви троса, которая одновременно новорачивает блок d оси 11. Нрн повороте чгого блока вокруг оси выступ 20 блока 4 набегает на шип
17собачки 14 и переводит ее в положение, когда зуб 15 ВХОДИТ в заценление с зубом внутрен1;его венца блока 4 (на фиг. 3 изображено нупктиро.м). При дальнс-йшей работе гидроци;п1пдров левая ветв1 .маркера выгягиваегся до положения, о1-раииче1 П011) упором. В это время зуб 15 собачки 14 проска.тьзывае по венцу, давая возможность блоку 4 прокручиваться до полной выборки троса. Таким образом, оба маркера находятся в транспортном (нринодняюм) положении. После разворота агрегата и заезда в борозду тракторист спускает рабочие органы (сошники) сеялки. Блок начинает двигаться в обратном направлении и ослабляет патяжение 1)оса. В это) .мо.ме}гг правая часть троса под действием веса правого маркера начинает с.матываться с блока 7 и вращае его, так как он не заперт собачкой 14 (зуб ./S не в.ходит в запенление е венцом). В это время вес левого маркера также действует на левую ветвь троса. Однако блок 4 не имеет возможности вращаться в направлении смагывания троса в CTOporiy левого маркера, поскол1жу собачка 14 запирает блок 4. При поiiOM поднятии рабочих оргацов происходит расстопоривание блока 4 и запирание блока 7, т. е. правый маркер запирается на опуска ие, п процесс повторяется в описанной Bbnjje 1 оследовательности нрт каждом ноднпмапии
опуекапнп рабочих органов сеялки.
П р е д м е и з о б р е т е п и я
1. Устройс1Ro для у 1рав;1еиия .маркера.мн сеялки, содериаицее два дВусгхпеича гьп блока, ме.чанизм их сюиорення и тросовую тягу, отличающееся тем, что, с целью автоматического юпеременного включения правого или
лево1-о маркера в рабочее положение, а также для подъема: рабочего маркера в транспортное положение, оно смонтировано на одной неподвижной оси, причем блоки прилегают один к другому торцовыми поверхноС1я. по наибо.тьшс.му диа.метру.
2. Устройство по п . 1, отличаюи(,ееся тем, чго, е целью защиты от ныли и гряз.и, .механизм стонорения расноложен внутри блоков и вь1пол1 ен в виде одной двузубой собачки,
а зубья собачки расположены в разных плоскос1ях, соо1ветс;вуюп1их плоскостям зубчапях венцов.
.i. Устройство но нп. 1 и 2, отличающееся гем, что, с .ие.,ю .максимального П1однятия
i:ipKepa из |);:6o4i,i о к Ipanenopnirn ;n;.-iivi eппе, оно v ia6/i t4i() еило; ы 1 роликом, v.4;c)6o;:;;()
оба ()..
1. Устройство ио пп. 1--3, отличающееся
ie.M, что, с пельк; фиксацит .маркера при нер( сто рабочего ноложения в трапсi()|vrno(., на ветви троса, тянуп1,ей маркер, ус ановлена упорна.и Н1айба, ог11а11ичпвающая участок троса, по которо.му перекатывается
еи.товой ролик.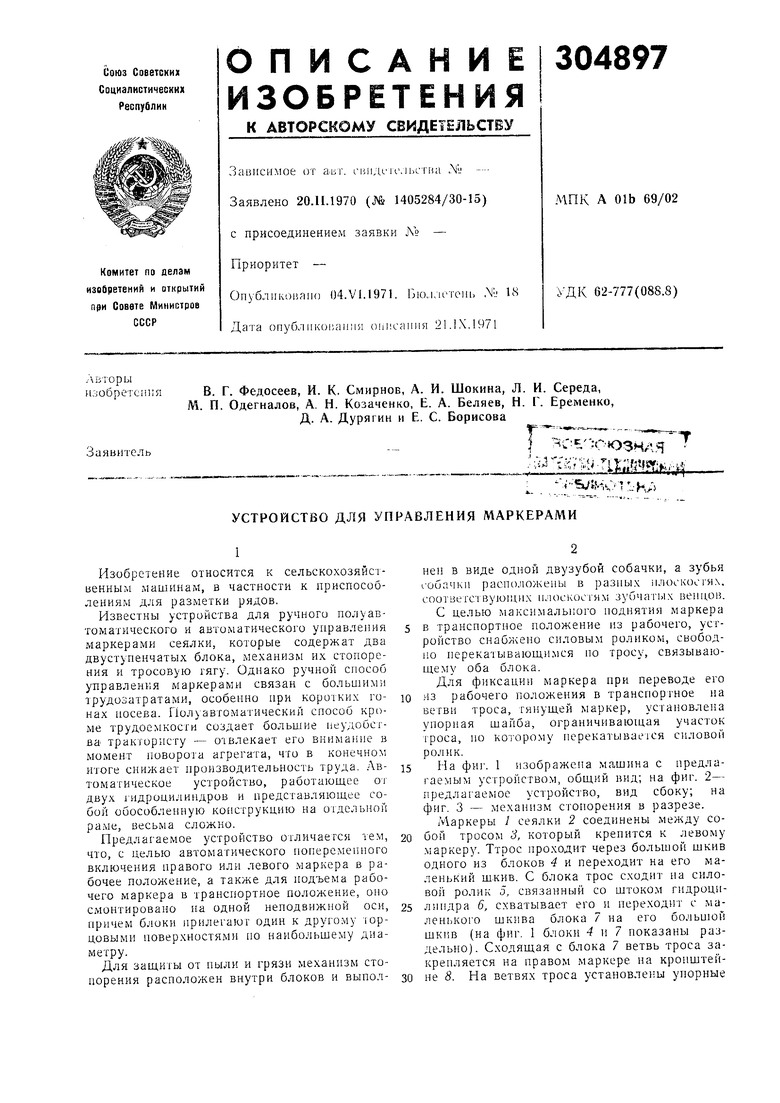
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ЗАМЕТА И ВЫБОРКИ КОШЕЛЬКОВОГО НЕВОДА НА СУДАХ С КОРМОВЫМ СЛИПОМ | 1965 |
|
SU171225A1 |
| АКТИВНАЯ ИСКУССТВЕННАЯ КИСТЬ | 1969 |
|
SU240929A1 |
| МНОГОПИЛЬНАЯ УСТАНОВКА ДЛЯ ПОПЕРЕЧНОЙ РАСПИЛОВКИ БРЕВЕН | 1967 |
|
SU204523A1 |
| КАРАБИН ДЛЯ ТРОСОВЫХ ОТТЯЖЕК | 1971 |
|
SU421565A1 |
| УСТРОЙСТВО для ТЕЛЕУПРАВЛЕНИЯ ГИДРОПРИВОДНЫМИ ЗАДВИЖКАМИ ЗАКРЫТЫХ ОРОСИТЕЛЬНЫХ СИСТЕМ | 1971 |
|
SU318769A1 |
| ЛОВИТЕЛЬ ПОДВЕСНОЙ ПЛАТФОРМЫ | 1972 |
|
SU346211A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ИЗДЕЛИЙ | 1970 |
|
SU264127A1 |
| БЛИОТЕКА j | 1972 |
|
SU324783A1 |
| ЦЕНТРОБЕЖНАЯ ХРАПОВАЯ МУФТА | 1970 |
|
SU271192A1 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ МЕРЗЛЫХ ГРУНТОВ | 1973 |
|
SU365439A1 |
,23
г, 2
I/
МУ
27
74
