Электроприводы непрерывных станов должны обеспечивать точное поддержание заданного соотношения скоростей отдельных клетей, малые величины статического и динамического падения скорости и минимальное время восстановления скорости после захвата металла валками.
Известны устройства для автоматического регулирования скорости электродвигателей клетей непрерывных прокатных станов в системе управляемый преобразователь - двигатель с регулированием поля двигателя посредством регулятора э.д.с. В этих устройствах двигатель работает на основной или выше основной скорости, э.д.с. двигателя поддерживается регулятором на уровне, близком к номинальному. Максимальное напряжение управляемого преобразователя превышает э.д.с. двигателя на небольшую величину. Это обусловлено следующими причинами: двигатель должен быть рассчитан на полное напряжение преобразователя, при более пизком напряжении он не доиспользуется по мош,ности; работа преобразователя с пониженным напряжением вызывала бы очень большое потребление реактивной энергии из сети. Из-за малой разности напряжения преобразователя и э.д.с. двигателя нри суш.ественной индуктивности якорной цепи трудно обеспечить быстрое нарастание тока якоря, а следовательно, и малое
падение скорости двигателя при входе металла в клеть и быстрое ее восстановление.
Цель изобретения - улучшить энергетические показатели привода, уменьшить динамическое падение скорости и время ее восстановления. Это достигается включением на вход регулятора э.д.с. обратной связи по току якоря через нелинейный элемент с релейной характеристикой.
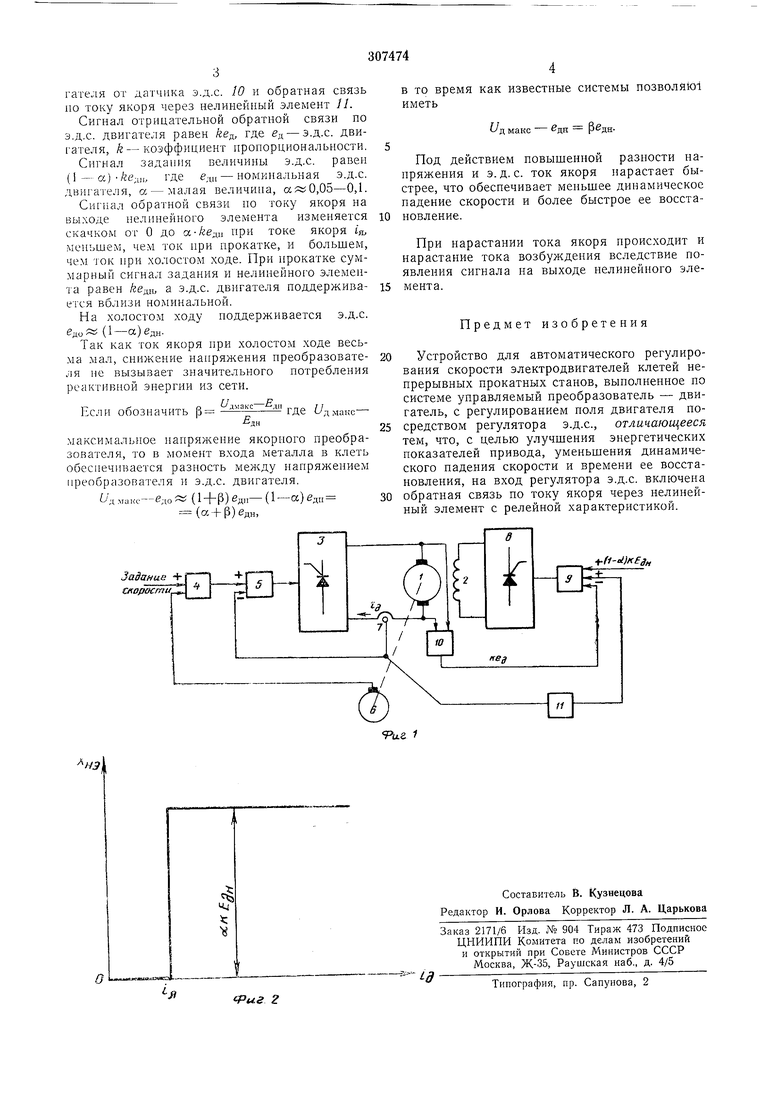
Сущность изобретения поясняется чертежом, где на фиг. 1 дана схема системы автоматического регулирования скорости и на фиг. 2- характеристика нелинейного элемента.
Электродвигатель / клети непрерывного
стана с обмоткой возбуждения 2 питается от управляемого преобразователя 3. Регулирование напряжения преобразователя осуществляется по системе подчиненного регулирования посредством последовательно включенных регулятора скорости 4 и регулятора тока 5. На вход регулятора скорости подаются сигнал задания скорости и обратная связь по скорости от тахогенератора 6. На вход регулятора тока подаются сигнал-задание с выхода регулятора скорости и обратная связь но току якоря от датчика тока 7. Обмотка возбуждения двигателя питается от преобразователя 8, управляемого посредством регулятора э. д. с. 9 на вход которого подается сигнал задания
гателя от датчика э.д.с. 10 и обратная связь по току якоря через нелинейный элемент 11.
Сигнал отрицательной обратной связи по э.д.с. двигателя равен йед, где вд - э.д.с. двигателя, k-коэффициент пропорциональности.
Сигнал задаппя величины э.д.с. равеп (1-а)/гид,, где е;щ - помкпальная э.д.с. двигателя, а.- малая величина, ,05-0,1.
Сигнал обратной связи но току якоря на выходе нелинейного элемента изменяется скачком от О до а-/гед„ при токе якоря in, меньшем, чем ток при прокатке, и большем, чем ток при холостом ходе. При прокатке суммарный сигнал задания и нелинейного элемента равен , а э.д.с. двигателя поддерживается вблизи номинальной.
На холостом ходу поддерживается э.д.с. бдо (1-а) бди.
Так как ток якоря при холостом ходе весьма мал, снижение нанряжения преобразователя не вызывает значительпого потребления реактивной энергии из сети.
дмакс-Е-щ
Если обозначить |3
где t/дмаксмаксимальное напряжение якорного преобразователя, то в момент входа металла в клеть обеспечивается разпость между напряжением преобразователя и э.д.с. двигателя.
д макс -бдо л; ( 1 +Р) бд,,- ( 1 -ос) бдп
(а+Р)ед„,
Задание + №opocrriu
В ТО время как известные системы позволяю иметь
ред
сдн
д макс
Под действием повышенной разности напряжения и э.д.с. ток якоря нарастает быстрее, что обеспечивает меньшее динамическое падение скорости и более быстрое ее восстановление.
При нарастании тока якоря происходит и нарастание тока возбуждения вследствие появления сигнала на выходе нелинейного элемента.
Предмет изобретения
Устройство для автоматического регулирования скорости электродвигателей клетей непрерывных прокатных станов, выполненное по системе управляемый преобразователь - двигатель, с регулированием поля двигателя посредством регулятора э.д.с., отличающееся тем, что, с целью улучшения энергетических показателей привода, уменьшения динамического падения скорости и времени ее восстановления, на вход регулятора э.д.с. включена
обратная связь по току якоря через нелинейный элемент с релейной характеристикой.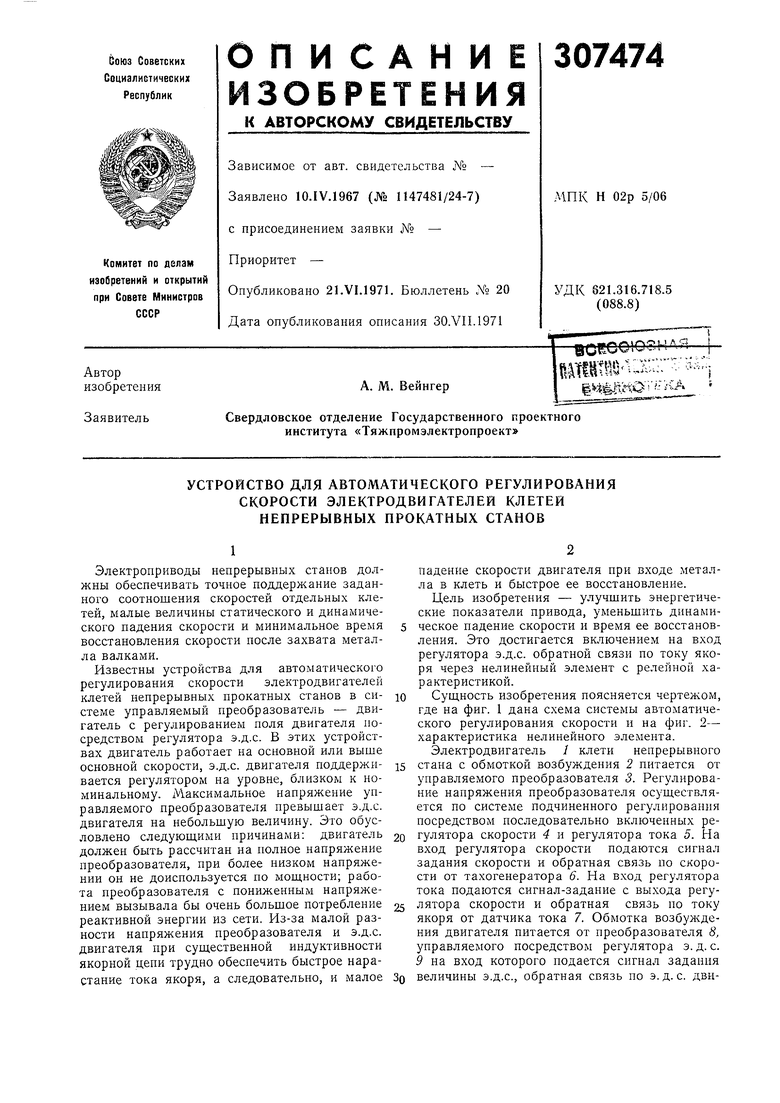
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1996 |
|
RU2095931C1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Электропривод клети прокатного стана | 1981 |
|
SU970615A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1973 |
|
SU375743A1 |
| Электропривод постоянного тока | 1977 |
|
SU729800A1 |
| Электропривод постоянного тока с двухзонной системой регулирования скорости | 1977 |
|
SU736319A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА ГЛАВНЫХ ПРИВОДОВ ПРОКАТНОГО СТАНА | 2011 |
|
RU2504447C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2011 |
|
RU2456741C1 |
