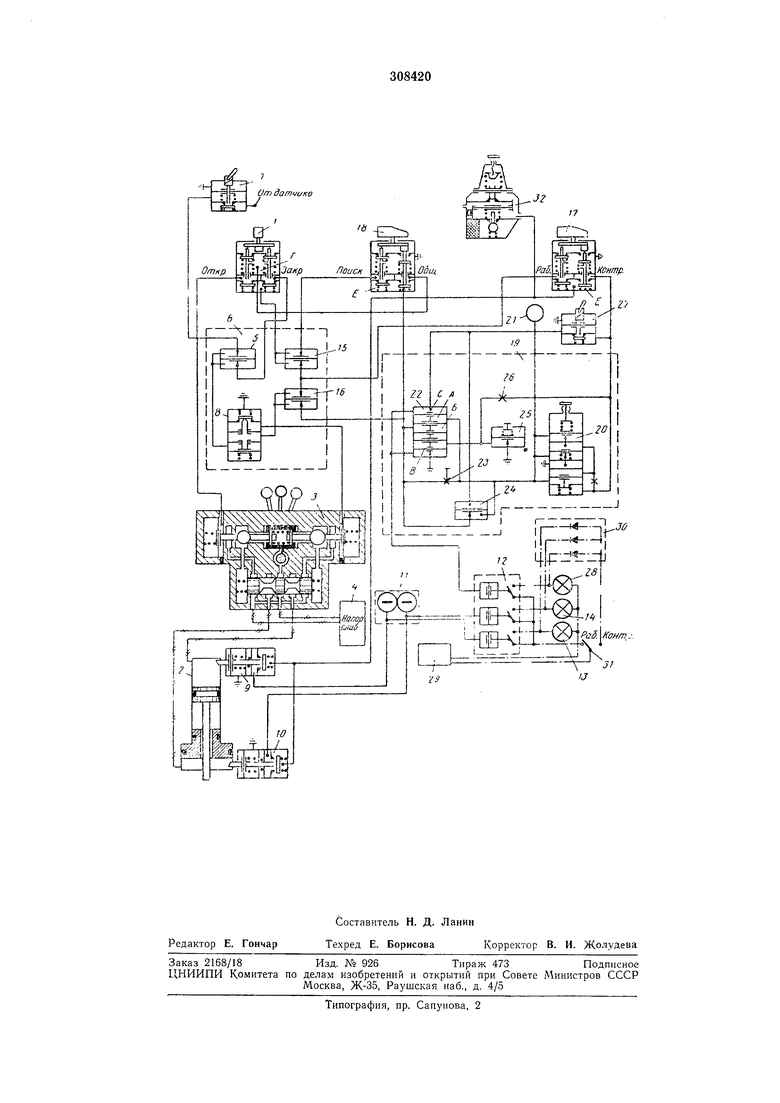
Изобретение относится к системам управления, а именно к пневматическим системам дистанционного управления. Известны системы управления судовыми агрегатами, содержащие переключатели управления, гидравлические исполнительные механизмы с указателями положения. Эти системы имеют разветвленную сеть трубопроводов, а щит управления достигает больших размеров. При этом отсутствует контроль герметичности линий управления, что снижает надежность системы в целом. Предлагаемое устройство, отличается от известных тем, что, с целью обеспечения контроля герметичности линий управления, оно снабжено двумя переключателя контроля и блоком контроля, выполненным в виде задатчика, формирующего выходное давление меньше уровня срабатывания пневмогидравлических преобразователей, питающий вход которого соединен с первым переключателем контроля, а выход через переменный дроссель, шунтирующий его клапан, и второй переключатель контроля соединен с каналами переключателей управления, линии до и после неременного дросселя соединены с камерами элемента сравнения с заданным уровнем срабатывания, выход элемента сравнения подключен к узлам сигнализации, а капал питания элемента сравнения и командный капал шунтирующего клапана соединены через тумблер с выходом первого переключателя контроля. Схема устройства приведена па чертенке. Переключатели управления /, число которых соответствует количеству исполнительных механизмов 2 (на чертеже показан одип переключатель и один исполнительпый механизм), имеют три полон ения: «Открыто, «Закрыто и «Нейтраль. Формирование командных сигналов к гидравлическому исполнительному механизму 2 осуществляется через пневмогидравлическпй преобразователь 5, к которому подключена насосная установка 4. Канал сигнала «открыто переключателя 1 соединен непосредственно с преобразователем 3. Капал сигнала «закрыто соединен с преобразователем 3 через элемент «ИЛИ 5, установленный в блоке логики 6. К элементу 5 также подключен через тумблер 7 выходной канал датчика. Перед преобразователем 3 включено реле 8. Контроль положения исполпительного механизма осуществляется с помощью конечных сигнализаторов 9 и Ю, выходы которых подключены к пневматнческим сигнализаторам //, установленным на местном щите управления, и через пневмоэлектрические преобразователи 12 к сигнализаторам 13 и 14. Питание к
li
3

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1971 |
|
SU322291A1 |
| Пневматическое устройство дистанционного контроля и управления | 1973 |
|
SU486312A1 |
| ПНЕВМАТИЧЕСКОЕ VCTPOfiCTBO ДЛЯ ДИСТАНЦИОННОГО | 1969 |
|
SU236898A1 |
| ВСЕСОЮЗНАЯ I | 1969 |
|
SU245490A1 |
| Устройство для ограничения предельного технологического параметра | 1985 |
|
SU1325542A1 |
| ЁСЕООЮЗНАЯ '1Ат:н^т1-Т(:шчЕ:«А!^Б!-!о*ичС*т?н:д : | 1970 |
|
SU281098A1 |
| УСТРОЙСТВО ДЛЯ НАГНЕТАНИЯ КРОВИ | 1970 |
|
SU419222A1 |
| Устройство для автоматического контроля пневмоэлектрических систем наддува топливных баков | 1972 |
|
SU457302A1 |
| БАРОКАМЕРА ДЛЯ ЛЕЧЕНИЯ БОЛЬНЫХ КИСЛОРОДОМ ПРИ ПОВЫШЕННОМ ДАВЛЕНИИ | 1971 |
|
SU300191A1 |
| УСТРОЙСТВО для ЦЕНТРАЛИЗОВАННОГО ИЗМЕРЕНИЕ—ВОСООЮЭНАЯПдШТе | 1971 |
|
SU318825A1 |